


FANUC ロボットをプログラミングする 5 つの専門的な方法
あなたは、選択した用途に FANUC ロボットが最適であると判断しました。
しかし、ファナックをプログラムする最良の方法は何ですか?
他に選択肢はありますか、それともメーカーが提供するデフォルトのオプションを使用する必要がありますか?
特徴的な明るい黄色のロボットを備えた日本のロボット メーカーであるファナックは、ビジネスにロボットによる自動化を追加したいと考えている人々に人気があります。
選択したロボットを最大限に活用したいと考えています。それは、最適なプログラミング方法を選択することを意味します。
ファナックをプログラムするデフォルトの方法が制限的である理由
FANUC が提供するデフォルトのプログラミング方法を使用する必要があると思われるかもしれません。これは一般的な仮定です。多くの人が既定の方法を使用して FANUC ロボットをプログラミングしていることは確かです。
FANUC ロボットを使用したプログラミングには、2 つの既定の方法があります。
これらは:
<オール>あなたまたはあなたのチームの誰かが Karel プログラミングの経験がある場合、または FANUC ティーチ ペンダントの使用経験がある場合、これらのプログラミング方法は実行可能なオプションになる可能性があります。

ただし、ロボットをプログラミングするデフォルトの方法は、必要以上に使いにくいことがよくあります。また、他のプログラミング方法に備わっている強力な機能も見逃しています。
デフォルトのオプションだけを選択すると、より直感的で強力なプログラミングを見逃してしまう可能性があります。
FANUC ロボットをプログラミングする 5 つの専門的な方法
ロボットをプログラミングする最良の方法は、既存のスキルを最大限に活用する方法です。また、ロボットから必要なすべての機能にアクセスできるもの。
FANUC ロボットをプログラミングする 5 つの優れた方法を次に示します。あなたのスキルとロボットの能力を最大限に活用する方法:
1.ティーチペンダントで
もちろん、ロボットをプログラミングするデフォルトの方法は、FANUC プログラミングの専門家によって広く使用されています。ロボットに付属のティーチ ペンダントを使用すると、そのコア機能の多くの側面にアクセスできます。
ティーチペンダントのプログラミングには多くの作業が必要です。ボタンを押したり、メニューをナビゲートしたり、目でロボットを目的の位置に向けて微調整したりします (「ジョギング」として知られる手法)。適切なサイズと複雑さのプログラムを作成するには、長いプロセスが必要です。後でプログラムに変更を加えるのも同様に骨の折れるプロセスです。
ティーチ ペンダント プログラミングは、適切な操作を行うと強力になります。しかし、大きな問題は、時間がかかるオンラインプログラミング方法であるということです。これは、ロボットを再プログラムするために動作を停止する必要があり、生産性が低下することを意味します。
2.テキストベースのオフライン プログラミング
代わりにファナック ロボットでオフライン プログラミングを使用することにより、オンライン プログラミングの悪影響を減らすことができます。これは、コンピューター上でプログラムを作成することを意味します。完了したら、ロボットのコントローラーにダウンロードできます。
オフライン プログラミングの最も基本的な形式は、テキスト エディターでプログラムをコーディングすることです。ファナックのKarelプログラミング言語を使用。ただし、これには、FANUC ロボットのプログラミングに関する豊富な経験が必要です。進行中にプログラムをデバッグする方法がありません。その結果、物理ロボットでのデバッグ フェーズが長くなり、オンライン プログラミングにも同様の遅延が発生します。
3.グラフィカルなオフライン プログラミングを使用
FANUC ロボットをオフラインでプログラミングするより良い方法は、専用のオフライン プログラミング ソフトウェアを使用することです。これにより、ロボットのプログラムを作成およびデバッグできます。これは、ロボットを生産から外す必要が生じる前に、グラフィカル シミュレーターを使用して行うことができます。
もちろん、オフライン プログラミング ツールの中には、他のツールよりも使いやすいものもあります。たとえば、RoboDK は、ロボット工学の経験がなくても誰でも使用できるオフライン プログラミングおよびシミュレーション ソフトウェアです。
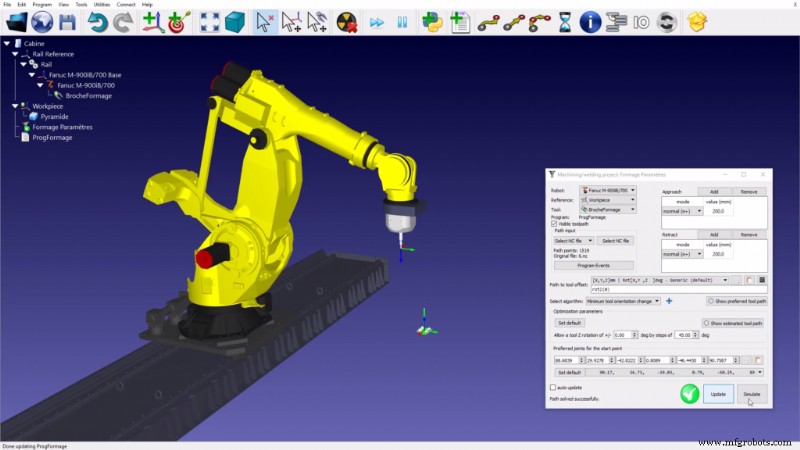
RoboDK は直感的なグラフィカル インターフェイスを提供し、ロボット プログラミングに追加機能をもたらします。これらは、次のような従来の方法では利用できません。専用の機械加工ウィザード、3D プリント機能など。
4.お気に入りのプログラミング言語で
あなたが経験豊富なプログラマーであるが、ファナックやロボット工学に関する具体的な経験があまりない場合、お気に入りの言語を使用してロボットをプログラミングできるかどうか疑問に思うかもしれません.
これまでは、ロボットのコントローラーとインターフェースをとるためのラッパー ライブラリーやネットワーク通信ライブラリーを作成する必要があったため、これは困難でした。しかし、今ではそれが可能で簡単です。
RoboDK を使用すると、いくつかの高水準プログラミング言語のいずれかを使用して FANUC をプログラミングできます。プログラムをロボットにダウンロードする前に、シミュレーターでプログラムをオフラインでテストできます。
5.ハンドヘルド プローブを使用
上記の 4 つの方法はすべて、ジオメトリとロボット プログラミングの少なくともある程度の理解が必要です。グラフィカル オフライン ソフトウェアを使用しても、グラフィカル シミュレーション内でロボットをドラッグできます。シミュレートされた環境が現実世界の環境とどのように関連しているかについて、まだ考える必要があります。
以上のことから、FANUC ロボットをプログラミングするための専門的な方法がもう 1 つあります。
RoboDK TwinTrack を使用すると、ハンドヘルドプローブを使用してロボットの目的のモーションをトレースするだけでプログラムを作成できます。次に、ロボットはその正確なモーションを再生します。 TwinTrack はオフライン プログラミングにも対応しているため、ロボットの生産に影響を与える必要はありません。
FANUC ロボットをプログラミングする最良の方法は?
では、これらのプログラミング方法のどれがあなたに最適でしょうか?
前述のように、最良のプログラミング方法は、プログラマーとしての既存のスキルを最大限に活用し、ロボットのほとんどの機能にアクセスできる方法です。
確かに、FANUC ロボットに付属するデフォルトの方法は、これらの基準を満たす可能性があります。
この記事に記載されている他のオプションを使用すると、より強力な機能に簡単にアクセスできます。ロボットのティーチ ペンダントのボタンを際限なく押したり、Karel プログラミング言語に縛られたりする必要はありません。
RoboDK で FANUC のプログラミングを試してみたい場合は、RoboDK ダウンロード ページで試用版を無料で入手できます。
RoboDK を使用して FANUC ロボットをプログラミングする方法の詳細については、専用のドキュメント ページをご覧ください。
FANUC ロボットのプログラミングで苦労したことは何ですか? 以下のコメントでお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、または RoboDK フォーラムでのディスカッションに参加してください。
産業用ロボット