


ステッピングモーターとは何ですか?タイプ、建設、操作およびアプリケーション
ステッピングモーターの種類–構造、作業操作、および用途
ステッピングモーターとのインターフェース用の専用ステッピングモータードライバーカードおよびその他のデジタル制御技術の発明 PCベースのシステムへの移行は、最近ステッピングモーターが広く受け入れられている理由です。ステッピングモーターは、正確な速度制御または正確な位置決め、あるいはその両方を必要とする自動化システムにとって理想的な選択肢になります。
多くの産業用電気モーターは、正確な位置決めまたは正確な速度制御を実現するために閉ループフィードバック制御とともに使用されますが、ステッピングモーターは開ループコントローラー。これにより、サーボシステム制御と比較して、システムの総コストが削減され、機械の設計が簡素化されます。 ステッピングモーターとそのタイプについて簡単に説明しましょう 。 
- 関連記事:サーボモーター–タイプ、構造、作業、およびアプリケーション
ステッピングモーターとは何ですか?
ステッピングモーター は、励起巻線に印加された一連の電気パルスを正確に定義された段階的な機械的シャフト回転に変換するブラシレス電気機械装置です。モーターのシャフトは、個別のパルスごとに一定の角度で回転します。この回転は直線的または角度的である可能性があります。単一のパルス入力に対して1ステップの動きが得られます。
一連のパルスが適用されると、特定の角度で回転します。ステッピングモーターのシャフトがパルスごとに回転する角度は、ステップ角度と呼ばれ、一般に度で表されます。
モーターに与えられる入力パルスの数がステップ角を決定するため、モーターシャフトの位置はパルスの数を制御することによって制御されます。この独自の機能により、ステッピングモーターは、フィードバックセンサーを使用せずに、正確なパルス数でシャフトの正確な位置が維持される開ループ制御システムに最適です。
ステップ角度が小さい場合、1回転あたりのステップ数が多くなり、得られる位置の精度が高くなります。ステップ角は90度から0.72度まで大きくすることができますが、一般的に使用されるステップ角は1.8度、2.5度、7.5度、15度です。
シャフトの回転方向は、ステーターに適用されるパルスのシーケンスによって異なります。シャフトの速度または平均モーター速度は、励起巻線に印加される入力パルスの周波数(入力パルスの速度)に正比例します。そのため、周波数が低い場合はステッピングモーターが段階的に回転し、高い場合は慣性によりDCモーターのように連続的に回転します。
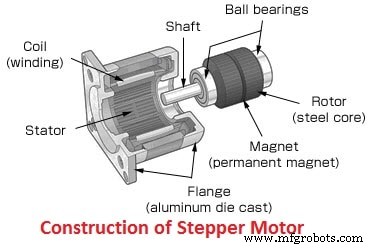
すべての電気モーターと同様に、固定子と回転子があります。回転子は、巻線、ブラシ、整流子を持たない可動部分です。通常、ローターは可変磁気抵抗または永久磁石のいずれかです。固定子は、多くの場合、多極および多相巻線で構成されます。通常、入力パルスあたりの望ましい角変位によって決定される必要な極数に対して3つまたは4つの相巻線が巻かれています。
他のモーターとは異なり、電子ドライブを介して固定子巻線に適用されるプログラムされた個別の制御パルスで動作します。回転は、順次通電される固定子巻線の極と回転子の極の間の磁気相互作用によって発生します。
ステッピングモーターにはいくつかのタイプがあります。 今日の市場では、さまざまなサイズ、ステップ数、構造、配線、ギアリング、およびその他の電気的特性で利用できます。これらのモーターは個別の性質で動作できるため、コンピューターなどのデジタル制御デバイスとのインターフェースに適しています。
速度、回転、方向、角度位置を正確に制御できるため、これらは産業用プロセス制御システム、CNCマシン、ロボット工学、製造自動化システム、および計装。
- 関連記事:ブラシレスDCモーター–構造、動作原理、アプリケーション
ステッピングモーターの種類
ステッピングモーターには3つの基本的なカテゴリがあります。 、つまり
- 永久磁石ステッピングモーター
- 可変磁気抵抗ステッピングモーター
- ハイブリッドステッピングモーター
これらすべてのモーターでは、励起巻線が固定子に採用されており、巻線の数は相の数を表します。
DC電圧が巻線のコイルに励起として印加され、各巻線端子はソリッドステートスイッチを介して電源に接続されます。ステッピングモーターの種類によって異なりますが、ローターの設計は、突極を備えた軟鋼ローター、円筒形の永久磁石ローター、軟鋼歯を備えた永久磁石などで構成されています。これらのタイプについて詳しく説明しましょう。
- 次の記事も読むことができます:三相モーター接続スター/デルタ(Y-Δ)リバース/フォワード、タイマー電源および制御図
可変磁気抵抗ステッピングモーター
これは基本タイプのステッピングモーターです。 それは長い間存在しており、構造的な観点から動作原理を理解する最も簡単な方法を保証します。名前が示すように、回転子の角位置は、固定子の極(歯)と回転子の歯の間に形成される磁気回路の磁気抵抗に依存します。

可変リラクタンスステッピングモーターの構築
これは、巻線型ステーターと軟鉄製マルチトゥースローターで構成されています。固定子には、固定子巻線が巻かれたケイ素鋼の積層のスタックがあります。通常、それは極のペアの間に分配される3つの相のために巻かれます。
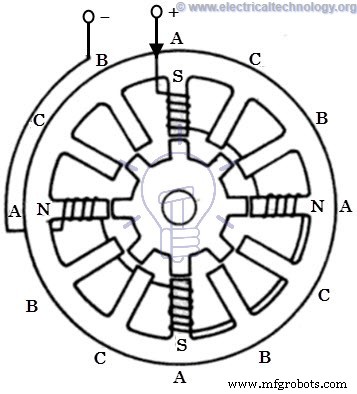
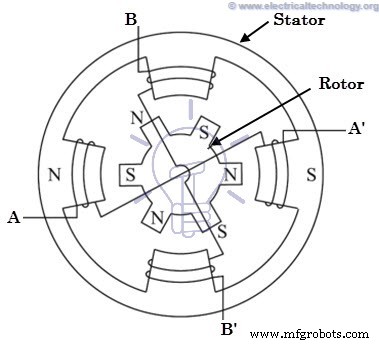
このように形成された固定子の極の数は、固定子に巻線が巻かれている相の数の偶数倍に等しくなります。下の図では、固定子には12個の等間隔の突出極があり、各極には励起コイルが巻かれています。これらの3つのフェーズは、ソリッドステートスイッチを使用してDC電源から給電されます。
ローターには巻線がなく、完全にスロット付きのスチールラミネートで作られた突出極タイプです。回転子極の突出した歯の幅は、固定子の歯の幅と同じです。固定子の極数は回転子の極数とは異なり、モーターの自己始動と双方向回転が可能です。
三相ステッピングモーターの固定子極に関する回転子極の関係は、Nr =Ns±(Ns / q)として与えられます。ここで、Ns =12、q =3、したがってNr =12±(12/3)=16または8です。励起のない8極構造のローターを以下に示します。
可変リラクタンスステッピングモーターの動作
ステッピングモーターは原理に基づいて動作します 最小の磁気抵抗経路が存在する磁気回路において、回転子が特定の位置で励起極の歯と整列すること。モーターに電力が供給され、特定の巻線を励起するたびに、モーターはその磁場を生成し、独自の磁極を発生させます。
回転子の磁極に残留磁気があるため、回転子はそのような位置に移動し、最小の磁気抵抗位置、つまり1組の回転子の極を実現します。固定子の通電された極のセットと整列します。この位置で、固定子の磁場の軸は、回転子の任意の2つの磁極を通過する軸と一致します。
ローターがステーターの極と整列するとき、シャフトが時計回りまたは反時計回りの方向に次の位置に移動するのを防ぐのに十分な磁力があります。
次の図に示すように、3相、6つの固定子極と4つの回転子歯の概略図を検討してください。スイッチ-1を閉じてA-A相にDC電源を供給すると、巻線が磁石になり、一方の歯が北になり、もう一方の歯が南になります。したがって、固定子の磁気軸はこれらの極に沿っています。
吸引力により、固定子コイルの北極は反対の極性の最も近い回転子の歯を引き付けます。つまり、南極と南極は反対の極性の最も近い回転子の歯、つまり北を引き付けます。次に、ローターは、ローターの磁気軸がステーターの磁気軸と正確に一致する最小磁気抵抗位置に調整されます。
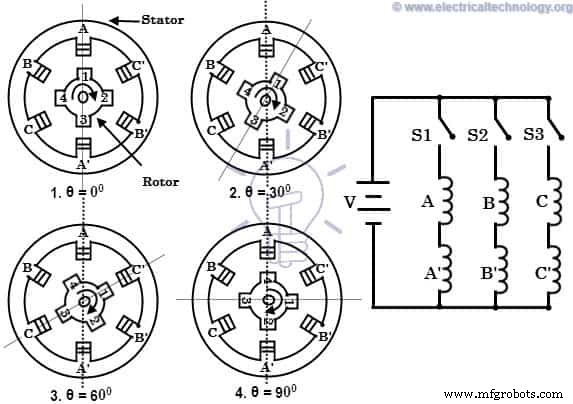
フェーズB-B'がフェーズA-A'を閉じたままスイッチ-2を閉じると、スイッチ-1を開くことによって電源が切られたままになります。巻線B-B'は磁束を生成するため、固定子の磁気軸はそれによって形成される極に沿ってシフトします。したがって、ローターは、磁化されたステーターの歯で最小の磁気抵抗にシフトし、時計回りに30度の角度で回転します。
スイッチ2を開いた後にスイッチ3がオンになると、フェーズC-C'がオンになり、ローターの歯が30度の追加角度で移動して新しい位置に位置合わせされます。度。このように、回転子は、特定の順序で固定子巻線を連続的に励起することにより、時計回りまたは反時計回りの方向に移動します。この3相4極ローター歯ステッピングモーターのステップ角は、360 /(4×3)=30度(ステップ角=360 / Nr×q)として表されます。
固定子と回転子の極数を増やすことで、ステップ角をさらに小さくすることができます。このような場合、モーターには追加の相巻線が巻かれていることがよくあります。これは、ステッピングモーターの異なる構造を採用することによっても達成できます マルチスタック配置や減速機機構など。
- 次の記事も読むことができます:三相モーター接続STAR/DELTAタイマーなしの電源と制御の図
永久磁石ステッピングモーター
永久磁石設計モーターは、おそらくいくつかのタイプのステッピングモーターの中で最も一般的です。名前が示すように、それはモーター構造に永久磁石を追加します。このタイプのステッピングモーターは、スタックモーターとも呼ばれます。 またはブリキ缶モーター 。このモーターの主な利点は、製造コストが低いことです。このタイプのモーターは、1回転あたり48〜24ステップです。

建設用永久磁石ステッピングモーター
このモーターでは、固定子は多極であり、その構造は前述の可変リラクタンスステッピングモーターの構造と似ています。それは、固定子コイルが巻かれるスロット付きの周囲で構成されています。スロット構造にポールが突き出ており、巻線は2相、3相、または4相になります。
これらすべての巻線の端部端子が購入され、駆動回路のソリッドステートスイッチを介してDC励起に接続されます。
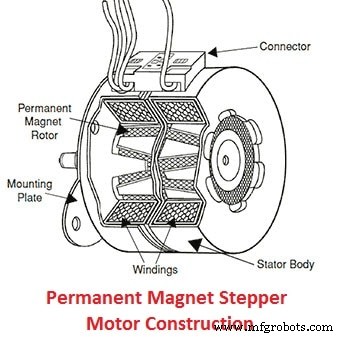
ローターは永久磁石材料でできています円筒形または突極の形をとることができるフェライトのようなものですが、通常は滑らかな円筒形です。北と南の極性が交互に変わる偶数の永久磁極を持つように設計されたローター。
永久磁石ステッピングモーターの動作
このモーターの動作は、異なる極が互いに引き付け合い、同様の極が互いに反発するという原理に基づいて機能します。固定子巻線がDC電源で励起されると、磁束が発生し、北極と南極が確立されます。永久磁石の回転子極と固定子極の間の引力と斥力により、回転子は、パルスが固定子に与えられる位置まで動き始めます。
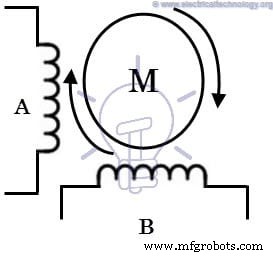
次の図に示すように、2つの永久磁石回転子極を備えた2相ステッピングモーターを検討してください。
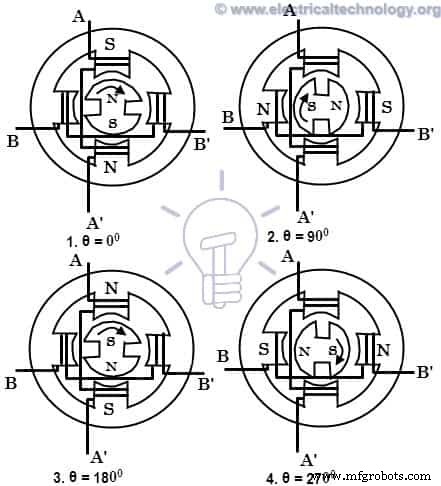
フェーズAが正の値で通電されている場合A'に関して、巻線は北極と南極を確立します。引力により、回転子の磁極は固定子の極と整列し、図に示すように、回転子の磁極軸が固定子の磁極軸と一致します。
励起がB相に切り替えられ、A相がオフになると、ローターはさらにB相の磁気軸に適応するため、時計回りに90度回転します。
次に、A相にA'に対して負の電流が流れると、固定子極が形成され、回転子が時計回りにさらに90度移動します。
同様に、A相スイッチを閉じることによってB相が負の電流で励起されると、ローターは同じ方向にさらに90度回転します。次に、A相が正の電流で励起されると、ローターは元の位置に戻り、360度完全に回転します。これは、固定子が励起されるたびに、回転子が時計回りに90度回転する傾向があることを意味します。
この2相2極永久磁石ローターモーターのステップ角は、360 /(2×2)=90度で表されます。ステップサイズは、2つの相を同時に通電するか、適切な極性で1相ONモードと2相ONモードのシーケンスをオンにすることで減らすことができます。
- 次の記事も読むことができます:モーター制御と保護に関連する用語と定義
ハイブリッドステッピングモーター
これは最も人気のあるタイプのステッピングモーターです ステップ分解能、保持トルク、速度の点で永久磁石ローターよりも優れた性能を提供します。ただし、これらのモーターはPMステッピングモーターよりも高価です。これは、可変磁気抵抗モーターと永久磁石ステッピングモーターの両方の最高の機能を兼ね備えています。これらのモーターは、1.5、1.8、2.5度などの非常に小さなステップ角を必要とするアプリケーションで使用されます。

ハイブリッドステッピングモーターの構築
このモーターの固定子は、永久磁石またはリラクタンスタイプの固定子と同じです。固定子コイルは交互の極に巻かれています。この場合、異なる位相のコイルが各極に巻かれます。通常、2つのコイルが極に巻かれ、バイファイラー接続と呼ばれます。
ローターは、軸方向に磁化されて一対の磁極(N極とS極)を形成する永久磁石で構成されています。各ポールは等間隔の歯で覆われています。歯は軟鋼と2つのセクションで構成されており、各ポールの歯のピッチが互いにずれています。
- 関連記事電気モーターの定格がkVAではなくkWである理由
ハイブリッドステッピングモーターの動作
このモーターは、永久磁石ステッピングモーターと同様に機能します。上の図は、2相、4極、6歯のローターハイブリッドステッピングモーターを示しています。相A-A'がDC電源で励起され、B-B'が励起されないようにすると、回転子の南極が固定子の北極に面し、回転子の北極が固定子の南極に面するように回転子が整列します。
ここで、フェーズB-B'が励起され、上部ポールが北になり、下部ポールが南になるようにA-A'をオフにしたままにすると、ローターは反時計回りに移動して新しい位置に位置合わせされます。フェーズB-B’が反対に励起され、上部の極が南になり、下部の極が北になると、ローターは時計回りに回転します。
固定子への適切なパルスシーケンスにより、モーターは目的の方向に回転します。励起するたびに、ローターは新しい位置にロックされ、励起が取り外されても、永久磁石の励起によりモーターはロックされた状態を維持します。この2相、4極、6歯のローターモーターのステップ角は、360 /(2×6)=30度として与えられます。実際には、ハイブリッドモーターは、高い角度分解能を得るために、より多くの回転子極で構成されています。
- 関連記事:モーター効率とは何ですか?それを改善する方法は?
ユニポーラおよびバイポーラステッピングモーター
上記のモーターは、コイル巻線の配置に基づいてユニポーラまたはバイポーラにすることができます。ユニポーラモーターは、相ごとに2つの巻線を備えているため、これらの巻線を流れる電流の方向によってモーターの回転が変化します。この構成では、電流は1つのコイルでは一方向に流れ、別のコイルでは反対方向に流れます。
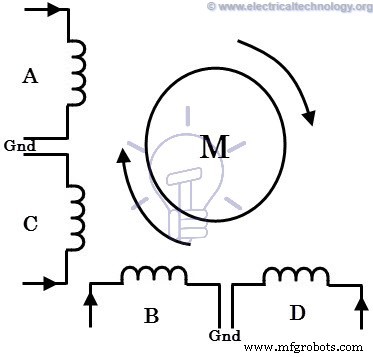
次の図は、2相ユニポーラステッピングモーターを示しています。AコイルとCコイルは一方の相用で、BとDはもう一方の相用です。各相では、各コイルは他のコイルとは反対方向に電流を流します。特定の回転方向を達成するために、各相で一度に1つのコイルのみが電流を流します。そのため、端子を各コイルに切り替えるだけで、回転方向が制御されます。
バイポーラステッピングモーターの場合、各フェーズユニポーラ1の場合、2つではなく1つの巻線で構成されます。この場合、回転方向は巻線を流れる電流を逆にすることによって制御されます。したがって、電流反転には複雑な駆動回路が必要です。
- 次のようにも読むことができます:ソレノイドおよびソレノイド磁場とは
ステッピングモーターのステッピングモード
通常のステッピングアクションにより、モーターは、与えられた電流パルスに応答して一連の平衡位置をステップスルーします。固定子巻線に通電する順序を変更するだけで、ステッピング動作をさまざまな方法で変更できます。以下は、ステッピングモーターの最も一般的な動作モードまたは運転モードです。
- ウェーブステップ
- フルステップ
- ハーフステップ
- マイクロステッピング
ウェーブステップモード
ウェーブステップモードは、他のすべてのモードの中で最も単純であり、常に1つの巻線のみが通電されます。相の各コイルは交互に電源に接続されます。次の表は、4相ステッピングモーターでコイルに通電する順序を示しています。
このモードでは、モーターは他のすべてのモードと比較して最大のステップ角を提供します。これは、ステッピングに最も単純で最も一般的に使用されるモードです。ただし、特定の時間に全巻線の一部を使用するため、生成されるトルクは小さくなります。 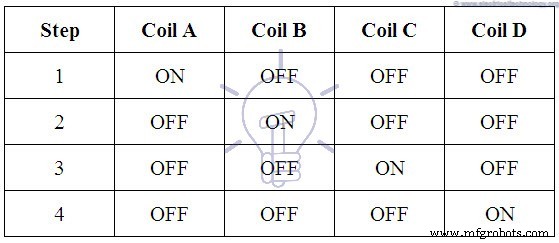
フルステップモード
このドライブまたはモードでは、2つの固定子相が常に同時に通電されます。 2つの相が一緒に通電されると、ローターは両方の相からのトルクを経験し、平衡位置に到達します。平衡位置は、2つの隣接する波のステップ位置または1相の励起の間にインターリーブされます。したがって、このステップは波のステップよりも優れた保持トルクを提供します。次の表は、4相ステッピングモーターのフルステップドライブを示しています。 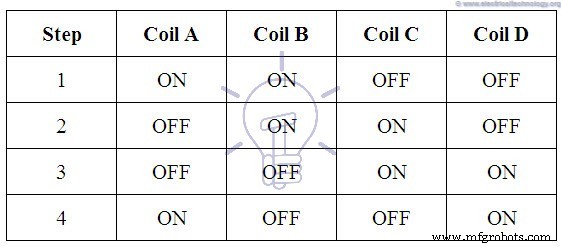
ハーフステップモード
これは、ウェーブモードとフルステップモードの両方の組み合わせです。この場合、単相励起と二相励起が交互に実行されます。つまり、単相オン、二相オンなどです。このモードのステップ角は、フルステップ角の半分になります。このドライブモードは、他のすべてのモードと比較して最高のトルクと安定性を備えています。ハーフステッピングの4相モーターの位相パルスシーケンスを含む表を以下に示します。 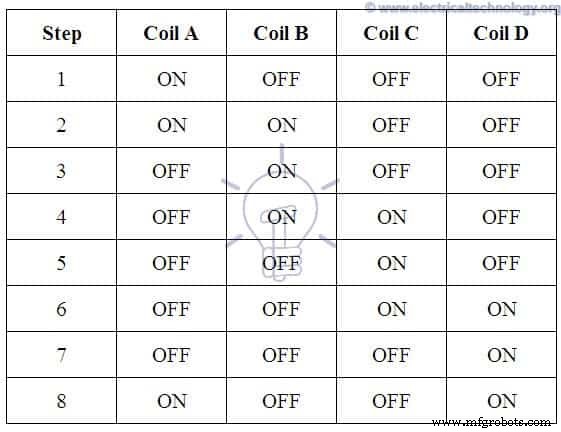
マイクロステッピングモード
このモードでは、各モーターステップがいくつかの小さなステップに分割され、数百の固定位置にさえ分割されるため、より高いポジショニング解像度が得られます。この場合、非常に小さなステップを得るために、巻線を流れる電流は継続的に変化します。この場合、2つの相が同時に励起されますが、各相の電流は等しくありません。
たとえば、フェーズ1を流れる電流は一定に保たれ、フェーズ2を流れる電流は、負または正にかかわらず、電流の最大値まで段階的に増加します。次に、フェーズ1の電流は、ゼロになるまで段階的に減少または増加します。したがって、モーターは小さなステップサイズを生成します。
これらのステッピングモードはすべて、上記の各タイプのステッピングモーターで取得できます。ただし、これらのステップ中の各巻線の電流の方向は、モーターのタイプに応じて変化する可能性があり、モーターはユニポーラまたはバイポーラのいずれかです。
- LTおよびHTモーターの関連するポストケーブルサイズの計算
ステッピングモーターの利点
- 停止位置では、モーターにフルトルクがかかります。瞬間や位置の変化がなくても。
- 位置の開始、停止、反転に対して適切な応答があります。
- ステッピングモーターには接触ブラシがないため、信頼性が高く、平均寿命はモーターのベアリングによって異なります。
- モーターの回転角は入力信号に正比例します。
- デジタル入力信号に応答するときにモーターが開ループ制御を提供するため、制御が簡単でコストもかかりません。
- モーター速度は入力パルス周波数に正比例するため、広範囲の回転速度を実現できます。
- 負荷がシャフトに結合されている場合でも、低速での同期回転を実現できます。
- ステップの精度が3〜5%で、あるステップから別のステップへの誤差が累積しないため、正確な位置と動きの再現性は良好です。
- ステッピングモーターは(サーボモーターと比較して)安全で低コストであり、低速で高トルク、あらゆる環境で動作するシンプルな構造で高い信頼性を備えています。
ステッピングモーターのデメリット
- 効率の低いステッピングモーター。
- 精度が低い。
- そのトルクは速度とともに非常に急速に低下します。
- ステッピングモーターは開ループ制御で動作するため、欠落した可能性のあるステップを示すフィードバックはありません。
- トルクと慣性の比率が低いため、負荷をあまり速く加速できません。
- うるさいです。
ステッピングモーターのアプリケーション
- ステッピングモーターは、自動化された生産設備や自動車のゲージ、包装、ラベリング、充填、切断などの産業機械で使用されています。
- セキュリティカメラや監視カメラなどのセキュリティデバイスで広く使用されています。
- 医療業界では、ステッピングモーターはサンプル、デジタル歯科写真、呼吸器、液体ポンプ、血液分析装置、医療用スキャナーなどで広く使用されています。
- これらは、画像スキャナー、コピー機、印刷機の家電製品や、自動ズームおよびフォーカス機能と位置のデジタルカメラで使用されます。
- エレベータ、コンベヤーベルト、レーンダイバータにも使用されるステッピングモーター。
また読むことができます:
- DCドライブ–電気DCドライブの構築、動作、分類
- 三相モーターの電力と制御の配線図
- 電気モーターライブラリ(ACおよびDC)
産業技術