


エンコーダーの種類:完全ガイド
エンコーダーの種類について、モーターを必要とするアプリケーションでは精密制御が重要です。回路に精密制御の問題がある場合、最初に頭に浮かぶのはステッピング モーターです。
ただし、すべての状況でこのような極端な対策が必要になるわけではありません。したがって、ロータリー モーター シャフトのような小さなプロジェクトで正確な制御が必要な場合は、適切な記事を読んでください。
これらの問題に対する簡単な解決策は、エンコーダー モーターです。
エンコーダは、精密制御の問題に対する安価でシンプルなソリューションです。しかし、それがどのように機能するかを理解するのは難しいかもしれません.
幸いなことに、エンコーダーの仕組み、種類、さまざまなアプリケーションを紹介するためにこの記事を書きました。
準備はできたか?飛び込みましょう!
エンコーダーモーターとは
ステッピング モーターが非効率的でコストがかかる状況にある場合、エンコーダー モーターが必要です。
ステッピング モーターとは異なり、エンコーダー モーターは裏側にロータリー エンコーダーを備えており、システムにフィードバック信号を送信します。
どのように?ロータリー エンコーダーを使用して、モーター シャフトの位置と速度を追跡します。
ここが最高の部分です。
市場には多種多様なエンコーダ モータがあります。これらのモーターには、アブソリュートまたはインクリメンタルなものもあれば、磁気式または光学式のものもあります。
つまり、エンコーダーの種類は、サイズ、形状、およびアプリケーションの種類に大きく依存します。
エンコーダー図
エンコーダの仕組み
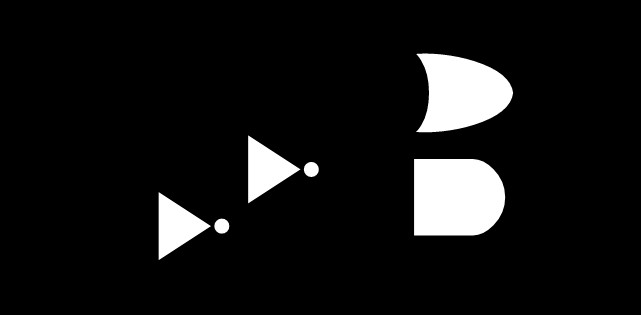
ロータリ エンコーダには、A と B というラベルが付いた 2 つの出力があります。これら 2 つの出力は、信号を生成するという同様の機能を実行する場合があります。これらの信号は、磁気、光、および抵抗の可能性があります。最も一般的なのは、光の遮断に基づいて信号を出す光学式エンコーダです。
物事を理解しやすくするための例を次に示します。メーカーによっては、エンコーダー内部のステッチのようなロータリーエンコーダーを GND または Vcc (Voltage Common Collector) で作成することが考えられます。エンコーダーの回転運動時、共通端子は A 端子または B 端子のいずれかに接触します。
エンコーダーが時計回りに回転する場合、接点 A が最初に High になり、次に接点 B が続きます。つまり、回転方向 (反時計回りまたは時計回り) に関係なく、常に 90 度の位相シフトがあります。 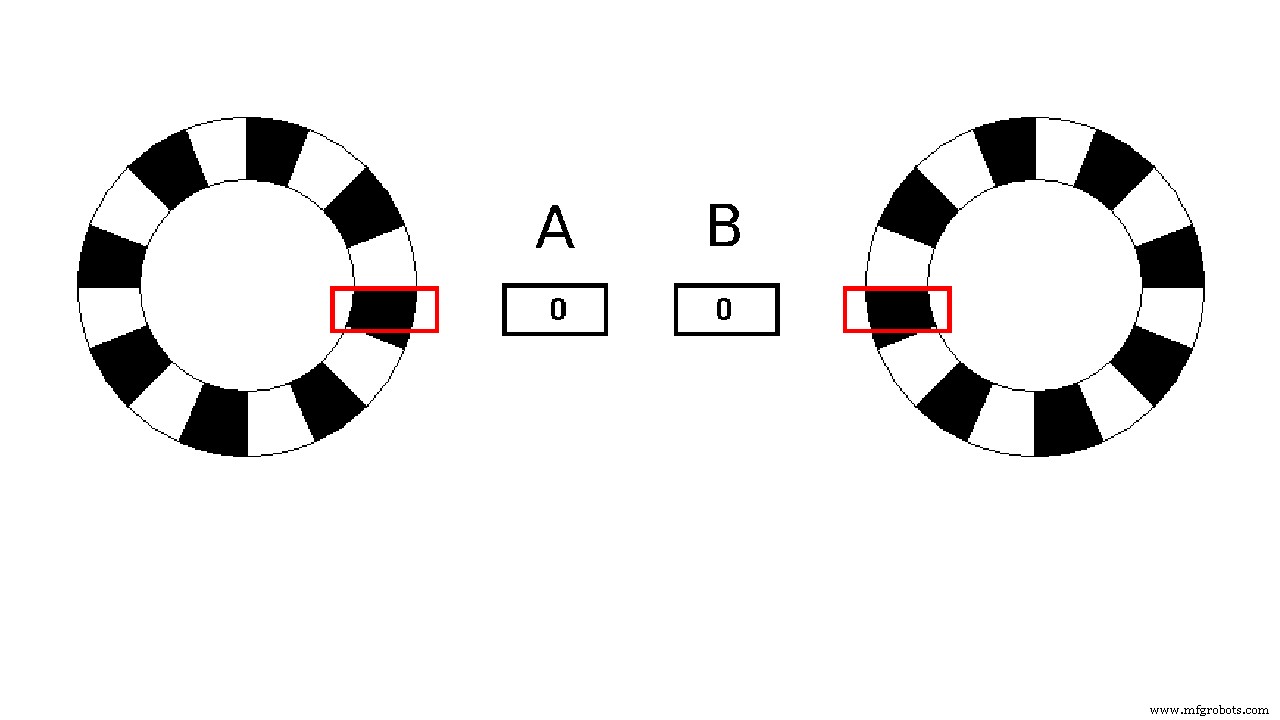
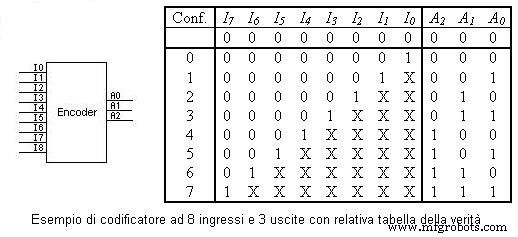
デュアル バイナリ エンコーダ
さらに、マイクロコントローラを使用すると、この位相シフトを簡単に検出できます。回転方向を決定するのに役立ちます。これを行うと、ギア付きエンコーダー モーターを使用している場合は、RPM または回転角度を示すカウンターを増減できます。
モーター エンコーダーの種類
前述のように、さまざまな機能、形状、およびサイズのさまざまなエンコーダ タイプがあります。ただし、市場に出回っている主なタイプのエンコーダー モーターは次のとおりです。
AC モーター エンコーダー
エンコーダ付きのモーターは DC モーターだけではありません。エンコーダ付き AC モータも市販されています。 AC 誘導は、制御システムおよび一般的なアプリケーションで一般的に選択されます。なんで?そのようなアプリケーションは長寿命で低コストだからです。これらのタイプのモーターは、速度制御が必要な旋盤で見つけることができます。
AC モーター エンコーダーのもう 1 つの用途は、ロボット工学です。エンコーダーは、アプリケーション中、常に、ロボットの動きの位置と経路に関する情報を提供します。
ステッピング モーター エンコーダー
私たちはあなたが何を考えているか知っています。ステッピング モーターがエンコーダーと連携するのはなぜですか?結局のところ、ステッピング モーターが最も得意とするのは正確な制御です。
しかし、そうではありません。
ステッピング モーターは精密な制御が得意ですが、エンコーダーはステッピング モーターの性能に大きな影響を与えます。したがって、ステッピング モーター エンコーダーは、エンコーダーと統合されたステッピング モーターです。
エンコーダが統合されたステッピング モーター システムをクローズド ループ ステッピング モーターと呼びます。これらのモーターは、オープンループのモーターよりも安定性と滑らかさを提供し、より高いトルクを実現します。
ステッピング モーター エンコーダーは、閉ループ フィードバック制御を提供します。また、ステッピングモーターによるステップロスを回避します。さらに、ステッピング モーター エンコーダーを光学式エンコーダーとロータリー エンコーダーに分けることができます。
DC モーター エンコーダー
これらは、市場で見つけることができる最も一般的なタイプのエンコーダー モーターです。通常は、背面に磁気エンコーダーが取り付けられた一般的な DC モーターです。フロントには、RPM を下げてトルクを上げるギア アセンブリがあるかもしれません。
また、エンコーダーはシステムにクローズド ループ フィードバックを提供します。これにより、1 分あたりの回転数を調整し、正確な速度制御のために駆動することができます。
つまり、DC モーターのフィードバックの速度を制御できます。それが可能なのは、DC モーター エンコーダーがローターの速度を測定できるメカニズムを提供しているからです。
サーボ モーター エンコーダー
サーボ モーターのアプリケーションは、油圧、空圧、および他のいくつかの電気機械式の運動に代わる一般的な方法になりました。
さらに、ファクトリ オートメーション、ロボット工学、その他の精密制御操作など、さまざまな用途にエンコーダ付きのサーボ モーターを使用できます。
サーボ モーター エンコーダーは、高トルク技術、小型サイズ、高効率を手頃な価格で提供します。また、世界中の生産施設の頼りになる製品です。
エンコーダ技術の種類
アプリケーションに応じて、さまざまな種類のロータリー エンコーダから選択できます。
リニア エンコーダー
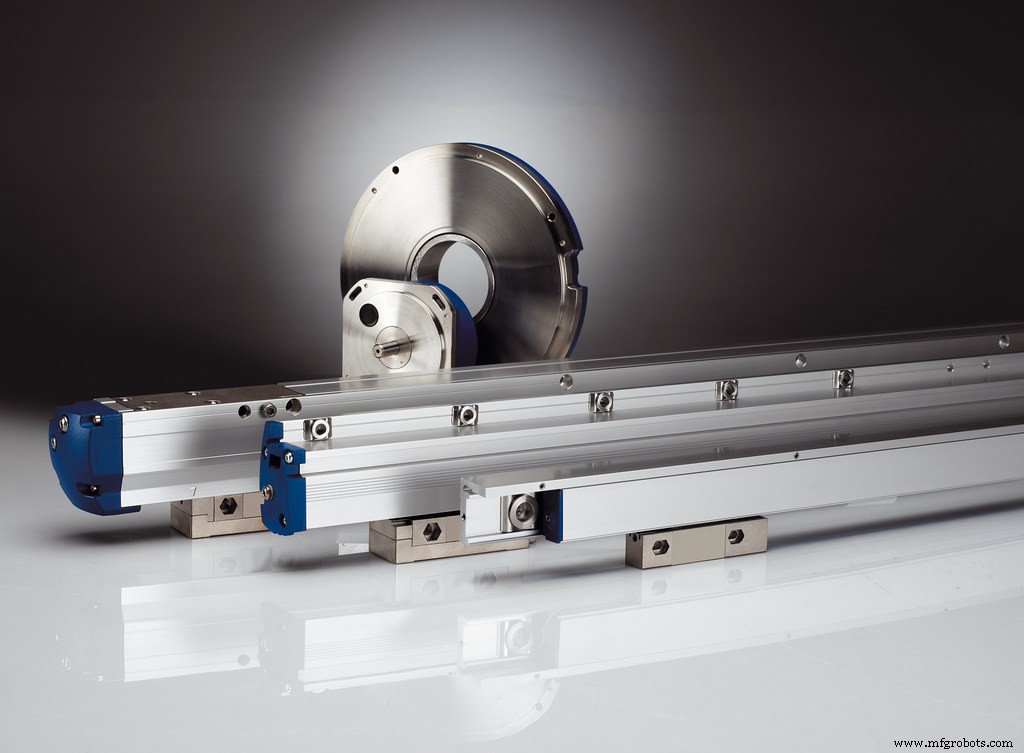
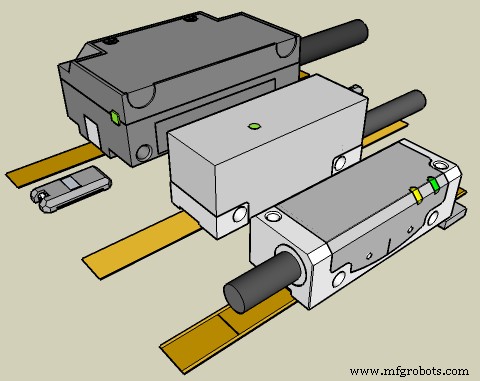
リニアエンコーダは、産業用オートメーションおよび制御アプリケーションで一般的です。このデバイスは、リニア スケールを使用してその位置を決定します。
リニアエンコーダ
このスケールには、スケールを読み取って位置を決定するセンサーがあります。さらに、デジタル バーニア キャリパーは、リニア エンコーダーの完璧な例です。
工業用オートメーション ツールなど、高精度の機器にリニア エンコーダが使用されています。
また、リニア エンコーダをアブソリュートまたはインクリメンタルと見なすこともできます。
光学エンコーダー
光学式エンコーダは、このリストで最も広く使用されているエンコーダです。そのコンポーネントは、光源、光検出器回路、およびエンコーダ ディスクです。
コードディスクからの光を使用してシャフトの動きを監視するモーションセンシングデバイスです。つまり、このエンコーダーは光の遮断に基づいてフィードバックを返します。
光学式エンコーダ
仕組みは次のとおりです。
まず、デバイスの電源を入れると光源がオンになります。光源は、パターンと不透明な線を含む透明なエンコーダ ディスクを通過する光のビームを放出します。
次に、光検出器が光ビームを拾い、それに応答します。したがって、このプロセスは、パルス列または方形波に変換する正弦波を生成します。光検出器を光検出回路と呼びます。
パルス信号は、点灯=オン、消灯=オフです。これらの信号は、電子基板を介してカウンタに転送されます。最後に、カウンターが信号を送信し、適切な機能 (回転、停止など) を生成します。
インクリメンタル エンコーダー
このタイプのエンコーダは、シャフトの位置または角運動をデジタルまたはアナログ コードに変換します。このコードを使用して、モーションまたは位置を選択します。また、最も一般的に使用されているロータリー エンコーダの 1 つです。
また、モータ速度および位置決めフィードバック アプリケーションでインクリメンタル エンコーダを使用することもできます。このようなアプリケーションには、ヘビーデューティー、サーボ/ライト、および産業用アプリケーションが含まれます。
さらに、インクリメンタル エンコーダは、優れた速度と距離のフィードバックを提供します。また、複数のセンサーを必要としないため、システムがシンプルで安価です。
インクリメンタル エンコーダーの唯一の制限は、変更情報の提供です。このために、エンコーダーは参照デバイスを使用してモーションを計算する必要があります。

インクリメンタル エンコーダ
アブソリュート エンコーダー
絶対エンコーダーは、このリストで最も興味深いエンコーダーです。真または絶対角度位置を測定します。角度位置の変化のみを計算するインクリメンタル エンコーダの反対です。
ここからが興味深いところです。
電源投入により、エンコーダがアブソリュートかインクリメンタルかが決まります。したがって、エンコーダーがその位置を取得するために「ウェイクアンドシェイク」プロセスを実行する場合、それはインクリメンタルです。位置を出力するためにモーションを必要としない場合、それは絶対的です。
アブソリュートエンコーダは、デジタル信号またはアナログ信号を出力として提供できます。これらの信号には、シリアル同期インターフェイス (SSI) と 0 ~ 10v または 4 ~ 20mA が含まれます。

角度エンコーダ
エンコーダーの応用
エンコーダーのさまざまなアプリケーションの一部を次に示します。
航空宇宙
エンコーダは、過酷な環境条件で動作する航空宇宙アプリケーションで高精度のモーション フィードバックを提供します。
航空宇宙
ボールねじの位置決め
エンコーダーは、ドライブ モーターまたはドライブ シフトの端に取り付けられると、モーション フィードバックを提供します。

ボールネジの配置
自動運転車とロボット
エンコーダーは、自動ロボット工学のアプリケーションに正確なモーション フィードバックを提供します。

自動ロボット
カット – まで – 長さ
ここで、エンコーダは一定量のパルスを生成します。これらのパルスはコントローラに転送され、移動距離が決定されます。
切り上げ
製品設計に最適なエンコーダを選択することは非常に重要です。このため、4 種類のエンコーダ技術とエンコーダ モーターの違いを理解する必要があります。
エンコーダ構成
技術の変化に伴い、位置フィードバックの要件に適合するエンコーダを選択してください。
これで、エンコーダー、タイプ、およびさまざまなアプリケーションについて知っておく必要があるすべてのことが終わりました。エンコーダーについてさらに詳しい情報が必要な場合は、お気軽にお問い合わせください。喜んでお手伝いいたします。
産業技術