


超音波センサー回路:完全ガイド
イルカやコウモリなどの動物は、音響ノイズと音を使用してナビゲートし、周囲を露出させます。この現象はエコーロケーションと呼ばれます。人間以外の動物で最初に発見されたにもかかわらず、それはそれらに固有のものではありません.たとえば、視覚障害者もエコーロケート能力を示しています。しかし、もっと重要なことは、最新のテクノロジーに適応させたことです。これの良い例は、超音波センサー回路です。このガイドでは、それが何であるか、それが何をするか、独自のものを作成する方法について説明します.
超音波センサーとは?
Sparki 超音波センサー
ソース: https://commons.wikimedia.org
超音波は、人間の可聴範囲を超える周波数である音波を表します。そのため、合成エコーロケーションの優れた候補になります。
極超音速音響システムと同様に、超音波センサーは音波を放出することでこの原理に基づいて機能します。これらの音波は物体に跳ね返り、センサーに戻ります。その後、センサーは、ベースからオブジェクトまでの移動時間と音速を測定することにより、距離を計算します。
したがって、簡単に言えば、超音波センサーは本質的に、物体の存在と物体間の距離を測定および検出するための費用対効果が高く信頼性の高い方法です。それらは、範囲とコストの点で、近接センサーとレーザー距離センサーの中間として機能します。基本的に、超音波センサーは近接センサーより長い距離をカバーしますが、レーザー距離センサーよりも短い距離をカバーします。

経膣超音波ワンドを持つ医師
超音波センサーの用途と主な利点
超音波センサーの利点と用途の概要を次に示します。
- 長距離 (50mm から 3.5m) にある小さな物体を検出できます
- それらの測定および検出機能は、ターゲットの表面とテクスチャを区別しません
- 超音波センサーは、以下の検出と測定に最適です:
- 金属、木材、プラスチック、紙、コルク、ガラスなどの固形物
- ティッシュやテキスタイルなどのロール製品
- 砂糖、小麦粉、じゃがいもなどのバルク商品
- 水、油、ジュースなどの液体
- 妊娠スキャンなどの医療用途に最適
- 自動車の衝突検知システムで使用できます
- 超音波センサーはターゲットの色に依存しません
- 環境の騒音、光のレベル、気温の変動に左右されない
- 超音波センサーは、蒸気、霧、ほこり、高湿度の影響を受けません
- ソリッドステート - ほぼ無制限でメンテナンス不要の寿命
超音波センサーの種類
超音波センサーを 3 つのグループまたはタイプに分類できます。
- 物体検出:これらのタイプの超音波センサーには、個別のオン/オフ出力しかありません。
- 距離測定 (超音波距離センサー):これらの超音波センサーは、移動時間を使用してオブジェクト間の距離を決定します。アナログ出力しかありません。
- 複合タイプ:これらのタイプの超音波センサーには、物体検出機能と距離測定機能の両方があります
ほとんどの場合、両方の機能を備えたセンサーと最も安価な最小センサーの価格差は 15% しかありません。それにもかかわらず、理想的なセンサーを選択することは、利用可能なすべてのオプションで少し圧倒される可能性があります.
そのため、利用可能なすべての仕様とパラメータ (出力、直径、距離など) を理解しておくとよいでしょう。
超音波センサー回路の作り方
ガイドのこのセクションでは、独自の超音波センサーを作成して操作する方法について説明します。
コンポーネントと材料
- ソルダーレス 400 ポイント回路ブレッドボード
- 6 x ジャンパー線
- Arduino Mega 2560 REV3
- HC-SR04 超音波センサー
- 巻尺
また、コンピューターと Arduino IDE の実用的な知識も必要です。
前提条件

HC-SR04 超音波センサー
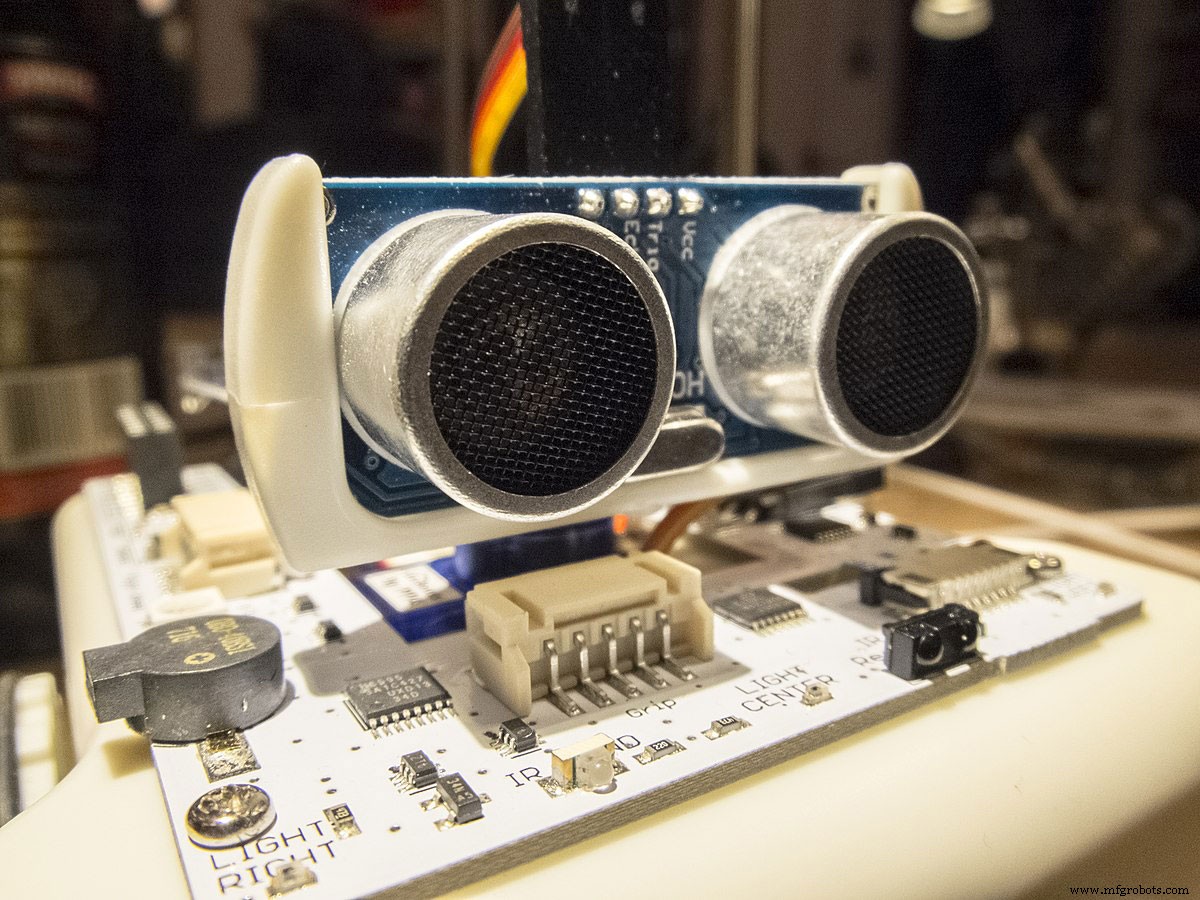
チュートリアルを始める前に、HC-SR04 超音波センサーについていくつか説明しましょう。まず、超音波センサー HC-SR04 の最大のコンポーネントが 2 つの同一のシリンダーであることに気付くでしょう。左のシリンダーはトランスミッターとして知られているもので、もう一方のシリンダーはレシーバーです。したがって、ボード上のラベル (T =送信機および R =受信機) によってどれがどれであるかがわかります。
送信機は超音波を送信し、受信機は物体から跳ね返る波を検出します。超音波センサー HC-SR04 には 4 つのピンがあります。
- Vcc ピン:モジュールに電力を供給する入力ピン (5V)
- GND ピン:接地ピン - マイクロコントローラーのグラウンドに接続します
- TRIG ピン:トリガー ピン - 送信ピン (送信コンポーネントを接続する出力ピン) - トリガー パルスを送信します
- ECHO ピン:信号を受信するための出力ピン (受信コンポーネントに接続)
それにもかかわらず、このプロジェクトは、センサーの前にあるオブジェクトを検出して表示することを目的としています。この場合、プロジェクトは結果をシリアル モニターに表示します。このプロジェクトに機能や複雑さを追加したい場合は、RGB ディスプレイを追加できます。
説明
Arduino 超音波センサーの図
ソース: https://commons.wikimedia.org/
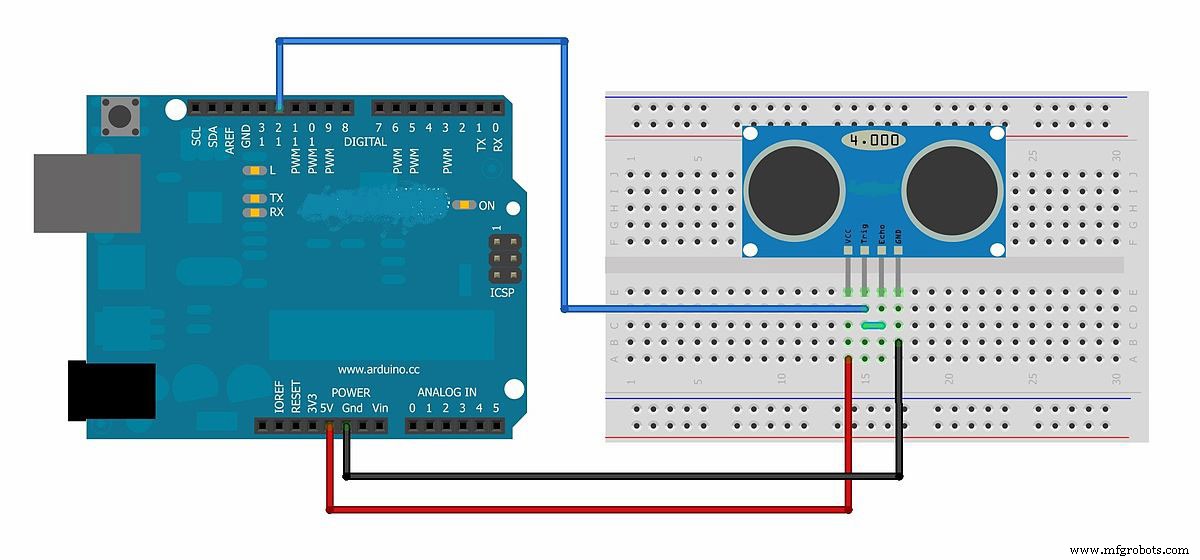
Arduino ボードを HC-SR04 センサーに接続する
まず、回路を配線しましょう。繰り返しになりますが、このプロジェクトは単純なので、安価な Arduino マイクロコントローラーを使用できます。
1. ジャンパー線の 1 つを使用して、HC-SR04 センサーの Vcc ピンを Arduino Mega の 5V ヘッダーに接続します。
*注: ブレッドボードをブリッジとして使用するか、HC-SR04 モジュールを直接 Arduino に接続できます
2. 次に、超音波センサー モジュールの Gnd/GND を Arduino マイクロコントローラーのグランド (GND) ヘッダーに接続します
3.超音波センサーモジュールの Trig (トリガー) ピンを Arduino マイクロコントローラーのヘッダー 10 に接続します
4. 最後に、Echo ピンを Arduino マイクロコントローラーのヘッダー 11 に接続します
上記の接続の保護が完了したら、コードの作業を開始できます。ケーブルを介して Arduino マイクロコントローラーを PC に接続する必要があります。繰り返しますが、Arduino IDE がインストールされていて、そのコンピューターで機能していることを確認する必要があります。
プロジェクトのプログラミング
1. Arduino ボードをコンピュータに接続します。
2. Arduino IDE を実行します。
3. 新しいスケッチを作成し、sketch_nov08a という名前を付けます。
4. 次に、NewPing.h ライブラリをインクルードします。 (#Include
*注:NewPing.h ライブラリには、超音波コンポーネントのコーディングを容易にする多数のクラスと関数が含まれています。
5. 次に、NewPing オブジェクトをインスタンス化し、Sonar という名前を付けます (NewPing sonar(10,11, 20) )。したがって、Sonar コンストラクターは 3 つのパラメーターを受け入れます。
- トリガーピン
- エコーピン
- センチメートル単位の最大距離 (HC-SR04 センサーの最大距離は 4 m)
6. setup 関数の下で、シリアル通信ライブラリから begin 関数を呼び出し、引数として 9600 を使用します – Serial。開始(9600)
7. 次に、60 ミリ秒を引数として delay 関数を呼び出します (delay(50))。 )
8. ループ関数の下に、「The distance is:」を引数としてシリアル ライブラリから print 関数の呼び出しを追加します (Serial.print("The distance is:") )。
9. ここでも、別の呼び出しを print 関数に追加します。しかし今回は、引数としてソナー オブジェクトから ping_cm 関数へのネストされた呼び出しを追加します (Serial.print(sonar.ping_cm())) ).
10. 最後に、1 秒の遅延を追加します (delay(1000))
それが完了したら、コードを実行し、ケーブルを接続したポートに移植します。最終的なスケッチは次のようになります:
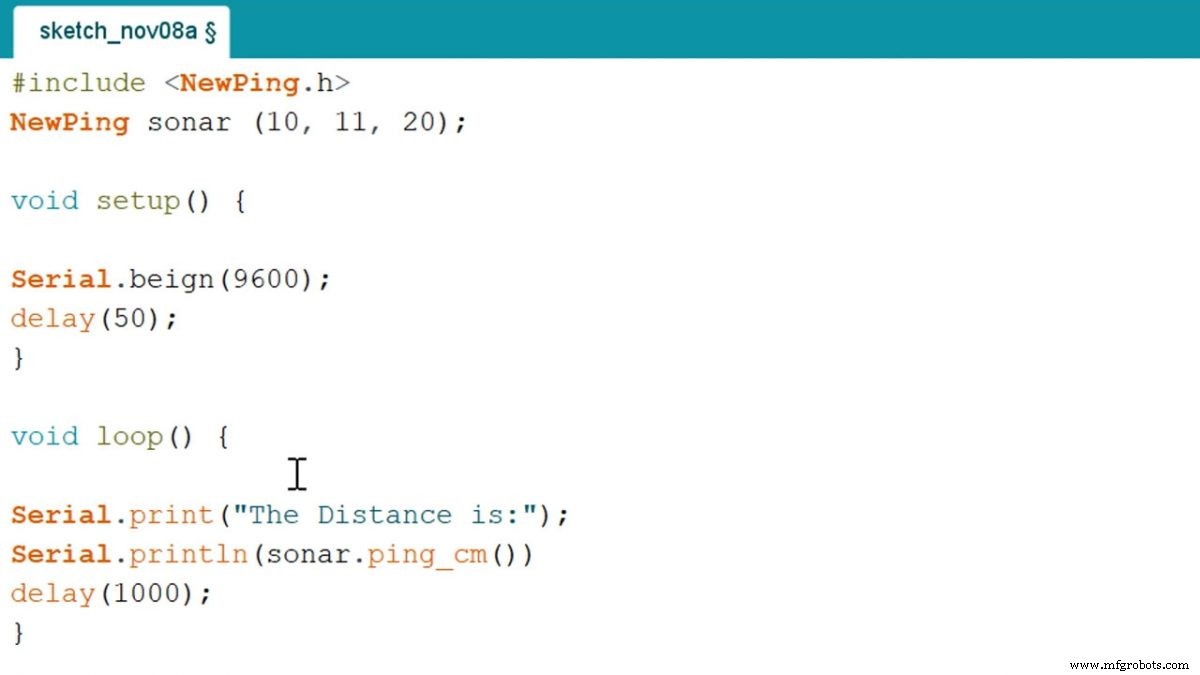
スケッチのスクリーンショット
ソース: https://imgur.com/5pWRX1e
上記のコードを正しく記述してコンパイルした場合、センサーの前にオブジェクトを配置すると、コンソール/シリアル モニター画面は次のようになります。
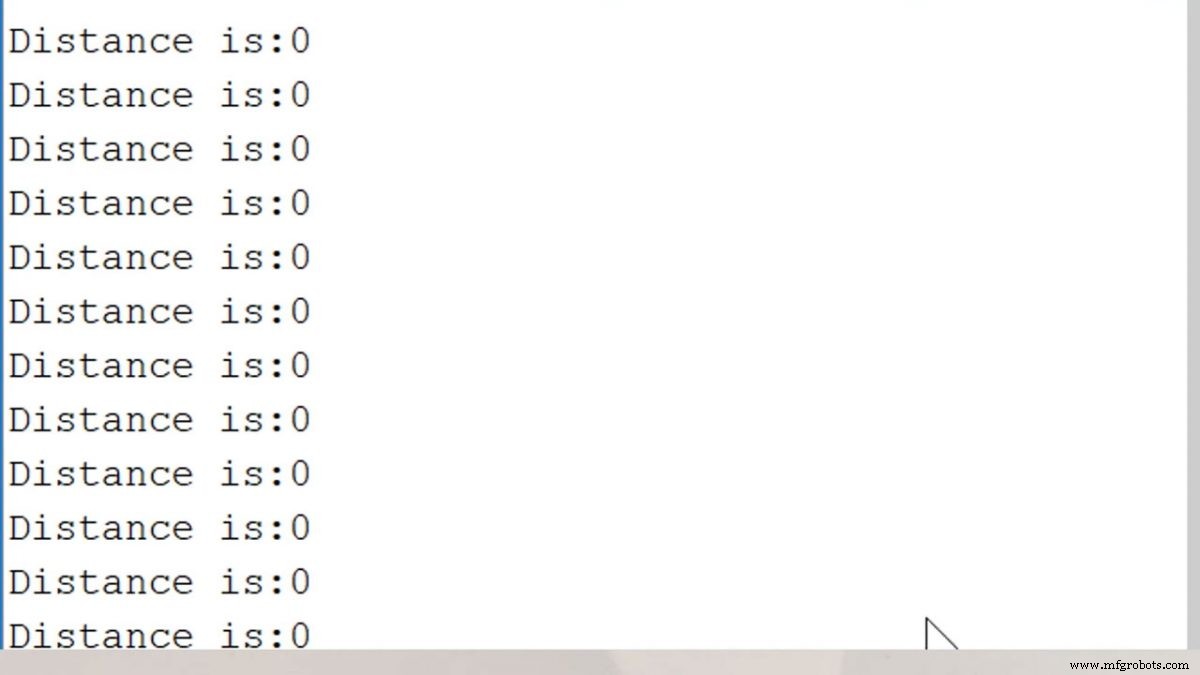
出力のスクリーンショット
ソース: https://imgur.com/fTg4D5K
より挑戦的なプロジェクトに興味がある場合は、Arduino Proximity Sensor ガイドにアクセスしてみませんか?
結論
超音波または超音波を使用することは、日常のテクノロジーでエコーロケーションをどのように使用できるかを示す優れた方法です。上記のガイドでは、超音波センサーとは何かについて説明しました。さらに、超音波検出の概念を理解するのに役立つように、Arduino マイクロコントローラーで超音波モジュールを使用する方法を示す短いチュートリアルも含まれています。それでも、このガイドを楽しんで読んでいただければ幸いです。いつも読んでいただきありがとうございます。
産業技術