


Raspberry Pi 用 GPS:GPS と Raspberry PI のインターフェース
Raspberry Pi 用 GPS について、GPS モジュールと Raspberry Pi を組み合わせたプロジェクトを探している GPS アプリケーションのファンですか?次に、適切な記事を読んでいます。
実際、簡単な接続とインターフェースで Pi を GPS 受信機に変えることができます。より高価な GPS 受信機には耐えられませんが、GPS データにアクセスできます。
これはどのように可能ですか?この記事では、必要なものと、GPS モジュールと Raspberry Pi の接続方法について説明します。
GPS を Raspberry Pi に接続するにはどうすればよいですか?
ラズベリーパイ
Wi-Fi やセルラー接続にアクセスできない状況では、GPS が頼りになります。 Raspberry Pi を屋外で頻繁に使用する場合は、電話やその他の高価な GPS 受信機がなくても GPS にアクセスできます。
始める前に、次のようないくつかのコンポーネントが必要です。
- GPS モジュール
- ラズベリーパイ
- ジャンパー線
- パワーバンク(モバイルにするため)
GPS モジュールを Raspberry Pi に接続する方法は次のとおりです。
ステップ 1:GPS モジュールを Raspberry Pi に接続する
GPS モジュールを Rasberry Pi に接続するには、Raspberry Pi の RX および TX ピンを利用した単純なシリアル接続を使用できます。
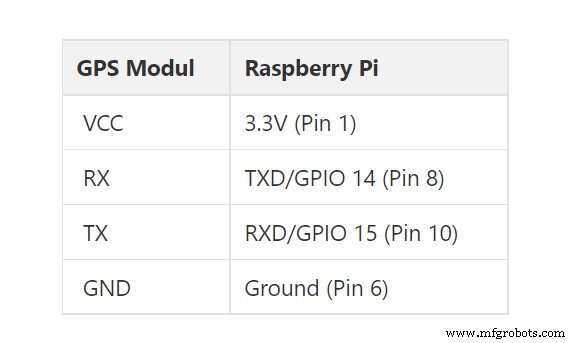
次に、モジュールの TX 出力を Pi の RX 入力に接続し、RX 入力を TX 出力に接続します。その後、モジュールの VCC と GND ピンを Pi の 3.3v (ピン 1) とグラウンド (ピン 6) にマージします。
簡単にするためのピン配置図を次に示します。
注:損傷を防ぐため、デバイスに適した電圧のみを使用してください。
ステップ 2:GPS 通信用に Raspbian を構成する
接続が確立したら、Pi の OS を構成して GPS 通信を有効にします。
以前にインストールした Raspbian OS で構成の問題が発生する場合があります。ただし、オペレーティング システムのクリーン インストールを使用すると、これらの問題を回避できます。
次のコマンドを実行して、構成を開始できます。

コマンドの後、以下の画面が表示されます:
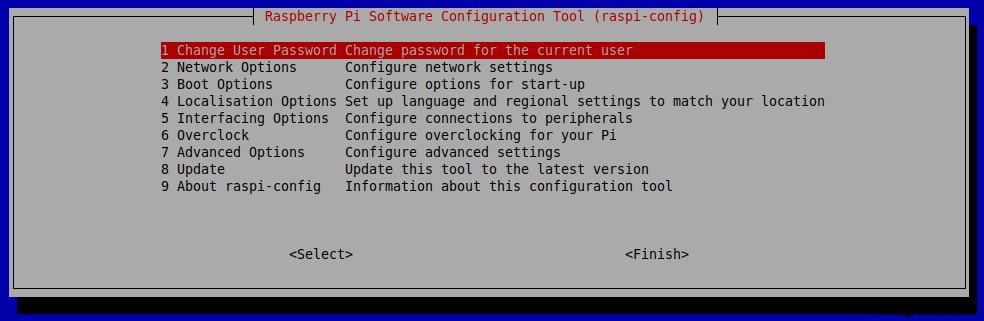
Raspberry Pi ソフトウェア構成ツール
次に、「インターフェース オプション」に移動し、「P6 シリアル」を選択します。次に、シリアル ログイン シェルを無効にし、プロンプトが表示されたらシリアル ポートを有効のままにしてください。
構成ツールのメイン メニューに戻り、[完了] を選択して、Raspberry Pi を再起動します。
ステップ 3:必要なソフトウェアをダウンロードする
このプロジェクトに必要なソフトウェアの 1 つが「gpsd」です。興味深いことに、次のコマンドで gpsd をインストールできます:

しかし、gpsdとは何ですか?簡単に言えば、シリアル GPS モジュールで動作し、さまざまな通信規格を可能にするインターフェイス デーモンです。これを使用して、テストの読み取り値を取得し、すべてが正常に機能するかどうかを確認できます。
インストール後、次のコマンドを使用して、Pi がモジュールから GPS データを受信しているかどうかを確認します。

上記のコマンドは、シリアル ポート経由で GPS モジュールからのデータを出力します。最初のテストでは、出力は次のようになります:
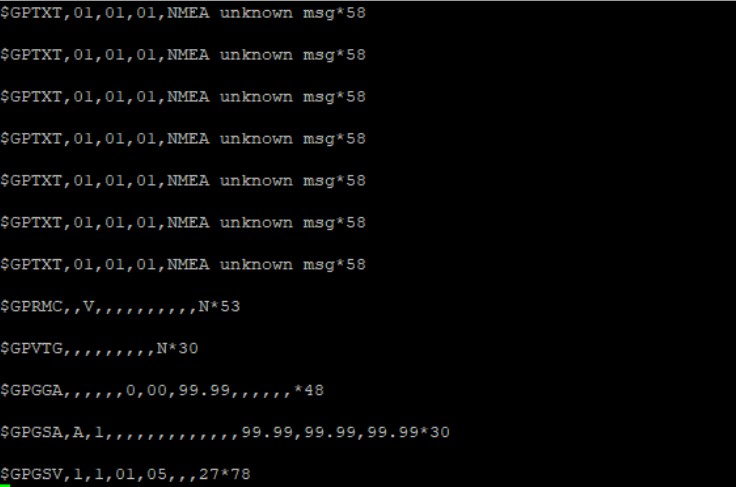
出力がゴミのように見えても気にしないでください。重要なのは、Raspberry Pi がデータを受信できることです。ただし、「データが受信されない」や「ポートがすぐに閉じる」などの問題が発生した場合は、接続を確認してください。
さらに、スーパーユーザーの特典なしでこのコマンドを実行できない場合は、次のコマンドを使用して、pi-user をダイヤルアウト グループに含めます。

ステップ 4:位置データの取得
すべてのテストと接続が完了したら、Raspberry Pi の正確な位置を取得できます。ただし、最初に、gpsd サービスがバックグラウンドで自動的に実行されないようにする必要があります。このプロジェクトに必要ないからではなく、互換性のないデフォルト設定のためです.
次のコマンドを実行して無効にします:

このコマンドを使用するとサービスが停止しますが、システムを起動するたびにサービスが開始されるのを防ぐことはできません。したがって、次のコマンドを使用して無効にすることができます:

その後、gpsd の新しいインスタンスを作成します。新しいインスタンスは、次のコマンドを使用して、正しいシリアル ポート データをソケットにリダイレクトします:

次に、次のいずれかのコマンドを使用して GPS データを表示できます:
コマンドを実行した後、最初の結果は不完全に見えるはずです。しかし、心配しないでください。正確な位置を取得するのに十分なデータを収集するには、約 30 分かかります。
ただし、特に屋内では、最初の起動時にのみ発生します。窓から屋外に向けることで、速度を上げることができます。
また、cgps を実行したときに出力がゼロになったり、gpsmon を実行したときにエラーが発生したりしても慌てないでください。代わりに、このコマンドを実行して問題を解決できます:

コマンドを実行すると、gpsmon と cgps の両方でスムーズに動作するはずです。
Python および C とのインターフェース
GPS モジュールを Python/C と Raspberry Pi にマージすることはかなり実現可能です。さらに、プログラミング言語を使用して GPS データを取得できます。
Python を使用すると、GPS モジュールから取得した NMEA GPGGA 文字列から時間、緯度、経度の情報を収集できます。実際、それらを端末に印刷し、GPS 情報を使用して Google マップで正確な位置を取得することもできます。
このプロジェクトに必要な Python プログラムは次のとおりです。
出力情報を取得したら、マップの URL リンクを呼び出して、Google マップで現在地を取得できます。
次に、次のリンクを使用できます:http://maps.google.com/?q=
Google マップ
C(WiringPi)
NMEA GPGGA 文字列を抽出して出力ウィンドウに出力し、C で記述された WiringPi ライブラリで読み取ることができます。
このプロジェクトの C プログラムはこちらから入手できます。このプログラムの出力は異なり、これを使用して Google マップで現在地を取得できます。
Raspberry Pi 3 以降と接続している場合は、プログラムでの接続に UART シリアル ポートを使用できます:/dev/ttyS0 .
ただし、Raspberry Pi 2 以前を使用している場合は、 /dev/ttyAMA0 を使用することをお勧めします
Raspberry Pi GPS ハット
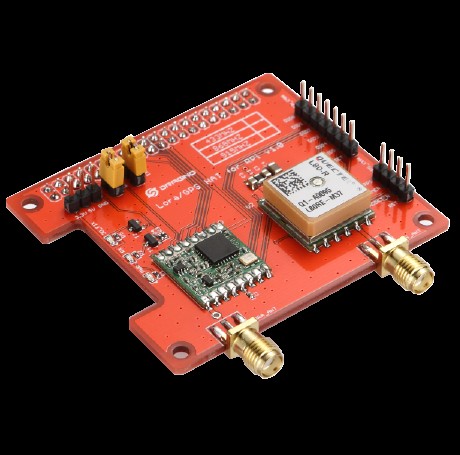
GPS ハット
Pi GPS HAT を使用すると、正確な時間と場所を Raspberry Pi に追加できます。 GPS HAT の機能には次のようなものがあります:
- 屋外で優れたパフォーマンスを発揮する内部パッチ アンテナが特徴です。
- また、外部アクティブ アンテナを接続できる +u.FL コネクタも備えています。
- GPS HAT は 20mA の消費電流しか使用しません。
- 組み込みのリアルタイム クロック (RTC) を備えています。
- GPS が正確な位置を取得すると点滅する LED も付いています。
Raspberry Pi GPS ナビゲーション ロボット
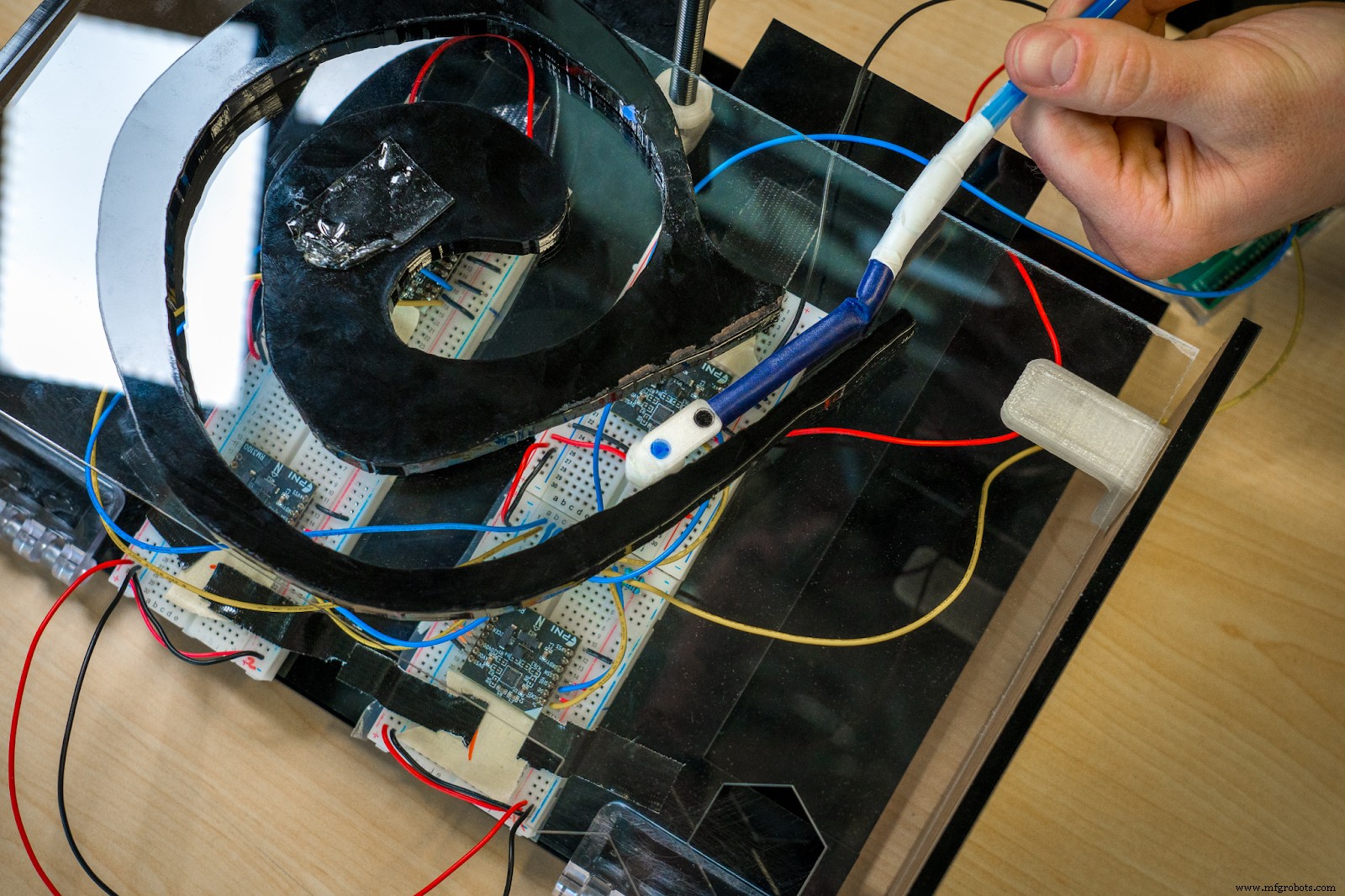
ロボットの構築
GPS ナビゲーション ロボットは、Raspberry Pi GPS コンボで作成できる多くの楽しいプロジェクトの 1 つです。最良の部分は、GPS ウェイポイントを設定し、このロボットを携帯電話で制御できることです.
興味深いことに、ウェイポイントを設定すると、ロボットは目的の場所に到達するための最適なコースを決定します。また、目的地に到着したときに警告することもできます。そして、それはすべて Raspberry Pi GPS に基づいています。
最後に
GPS を Raspberry Pi に接続すると、さまざまなプロジェクトの可能性が広がります。たとえば、前述したように、ナビゲーション ロボット、気象観測所、ドローン トラッカー、自動車追跡システムを構築することもできます。
GPS モジュール
GPS モジュールも安価で、セットアップも比較的簡単です。間違いなく、十分なデータを抽出するのに多くの時間がかかる可能性があり、受信状態が悪いとイライラする可能性があります.しかし、彼らは非常に屋外で働きます。
では、GPS モジュールを Raspberry Pi と接続しますか?もっと質問がありますか?必ずご連絡ください。
産業技術
- DS18B20で温度を読み取る|ラズベリーパイ2
- RASPBERRYPIによる温度測定
- ラズベリーパイで温度を監視する
- Raspberry Pi、DHT11センサー、Thingspeakを使用して最初のIOTを構築します。
- ラズベリーパイに最適なアクセサリー
- HC-SR501PIRモーションセンサーとRaspberryPiのインターフェース
- ArduinoとRaspberryPiを使用してインターネット制御のビデオストリーミングロボットを構築する
- RaspberryPiでセグウェイを構築する
- ウォータージェットを最適化するための4つのヒント
- 板金エンクロージャ用のヒンジ
- 農機具で注意すべき悪いクラッチの5つの兆候