


スマートシューズ(自動レーシングおよび発電)
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
|
このプロジェクトについて
私はサイエンスフェアのためにこのプロジェクトを開始し、このプロジェクトを作成して、Arduinoサーボや多くのことについて経験を積みました。そして、きっとこのプロジェクトを楽しんでいただけると思います。
ステップ1:必要な部品 <図>
 <図>
<図>  <図>
<図> 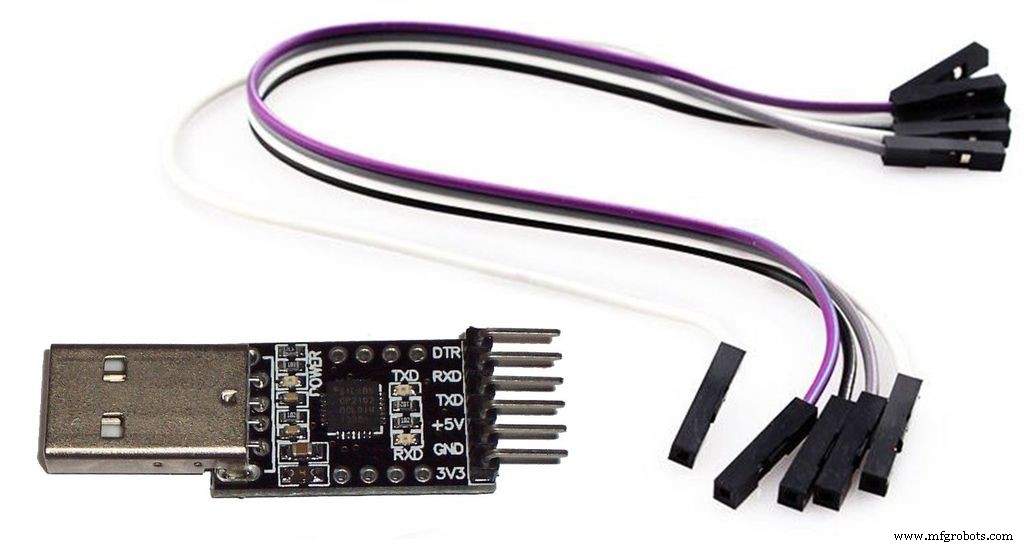 <図>
<図>  <図>
<図>  <図>
<図> 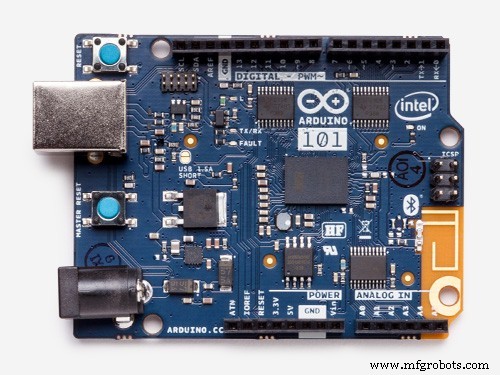
発電用:
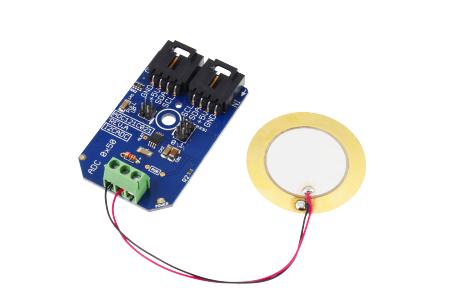
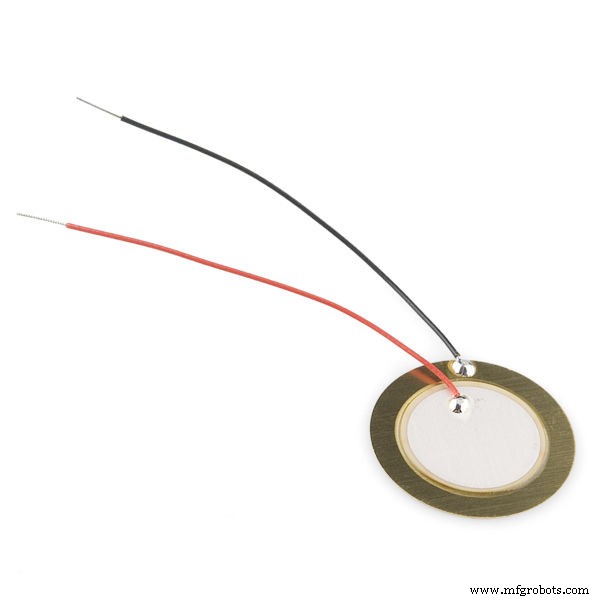
- ピエゾディスク
- ダイオード(n4001)
- パワーバンク
- アクリルシート
- 主導
- 切り替え
自動レーシングの場合:
- 靴
- Arduino pro mini5vまたはArduino101またはMKRFOX1200
- CP2102 USB2.0からTTLUARTシリアルコンバータモジュール(Aruino 101またはMKRFOX1200を使用している場合、これは必要ありません)
- サーボ(10kg以上のトルク)
- Ziptie
ステップカウンターの場合:
- カウンター
- プッシュボタン
- ワイヤー
ステップ2:発電 <図>
 <図>
<図> 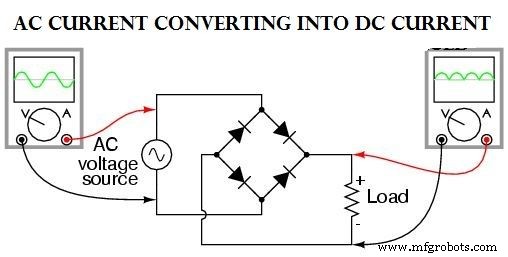 <図>
<図> 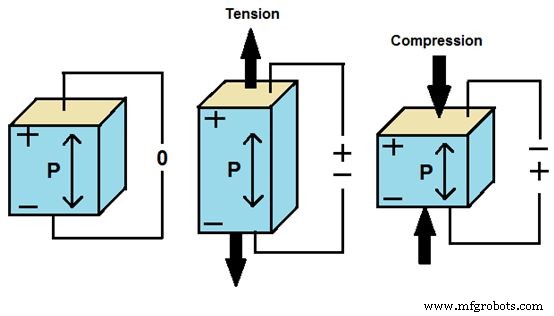 <図>
<図> 
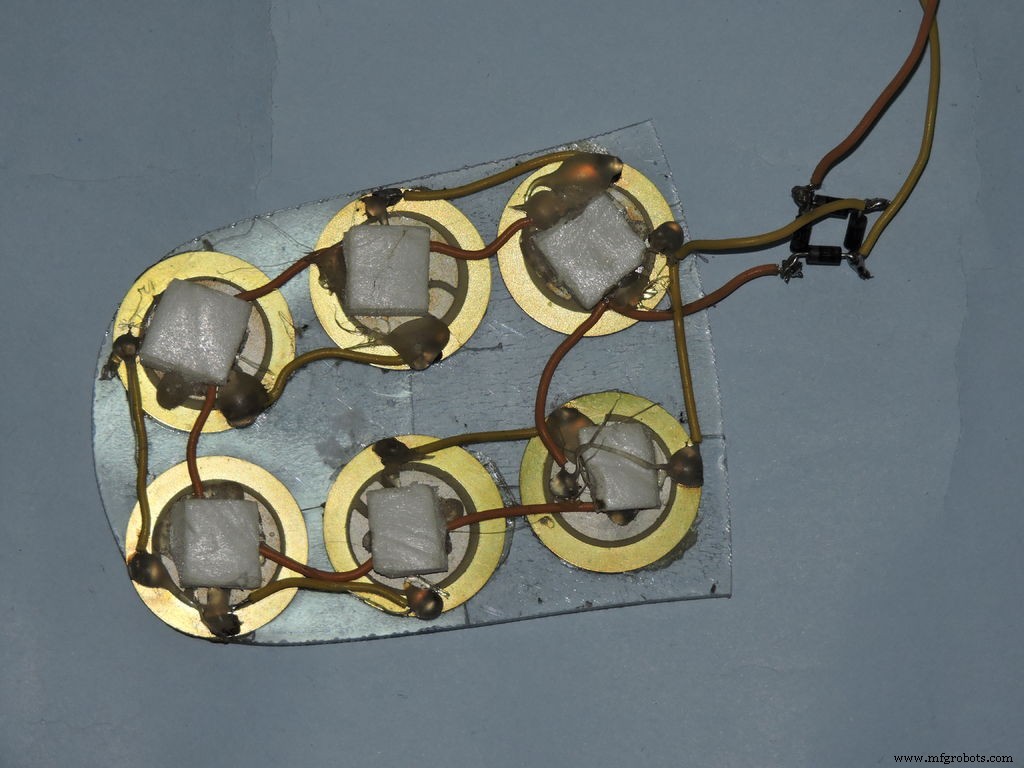
私はピエゾがそれにくっつくためにアクリルベースを作りました、そしてピエゾが電気を生成するために張力と圧縮を必要とするのでそれが電気を生成しないすべてのピエゾの下に穴を開けることを確認してください。そして、フォームまたは同じ種類の材料を配置します。
すべてのピエゾ素子を並列に接続します。
整流器はAC電流をDC電流に変換しています。
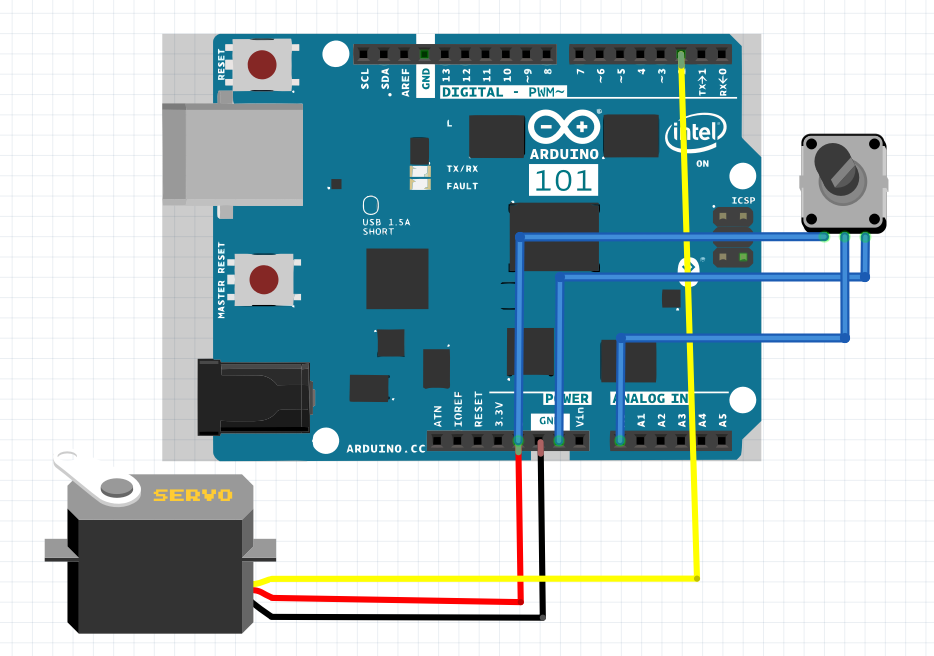
ステップ3:自動レーシング <図>
 <図>
<図>  <図>
<図>  <図>
<図>  <図>
<図> 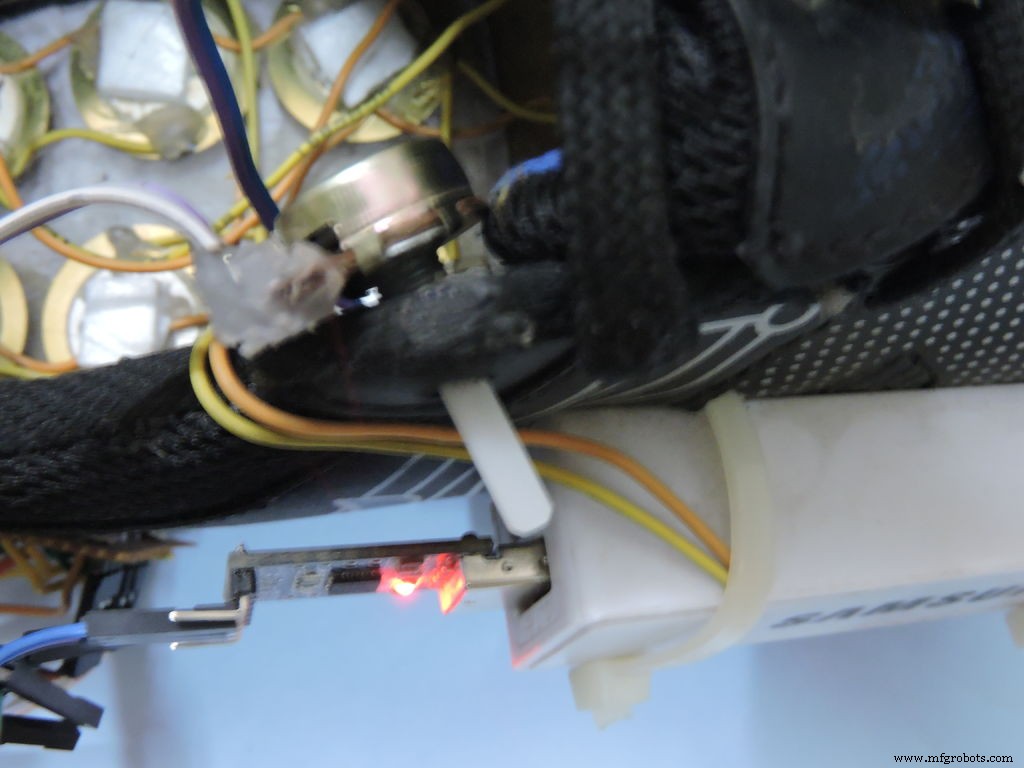 <図>
<図> 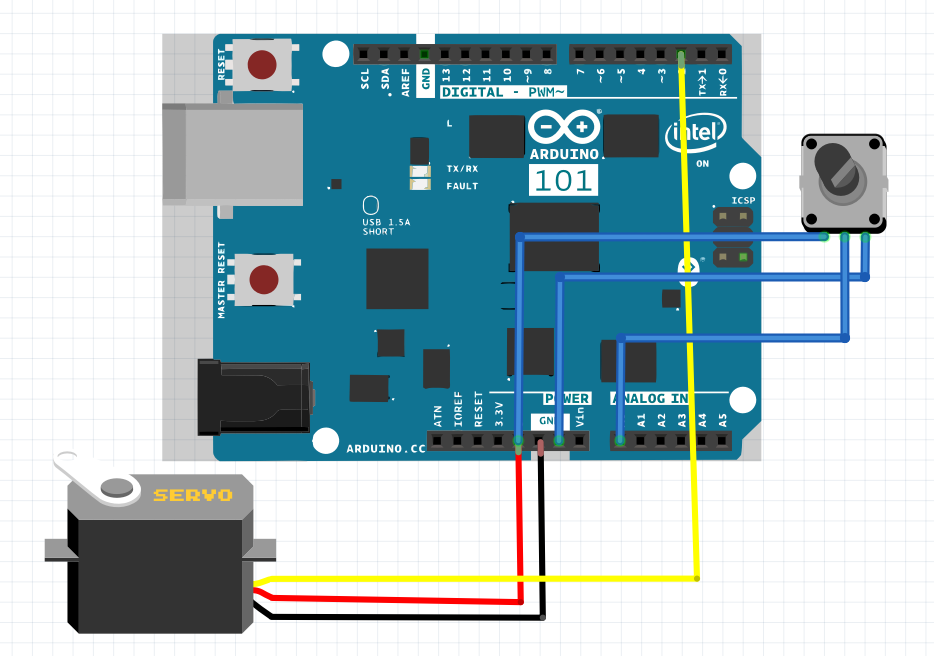 <図>
<図> 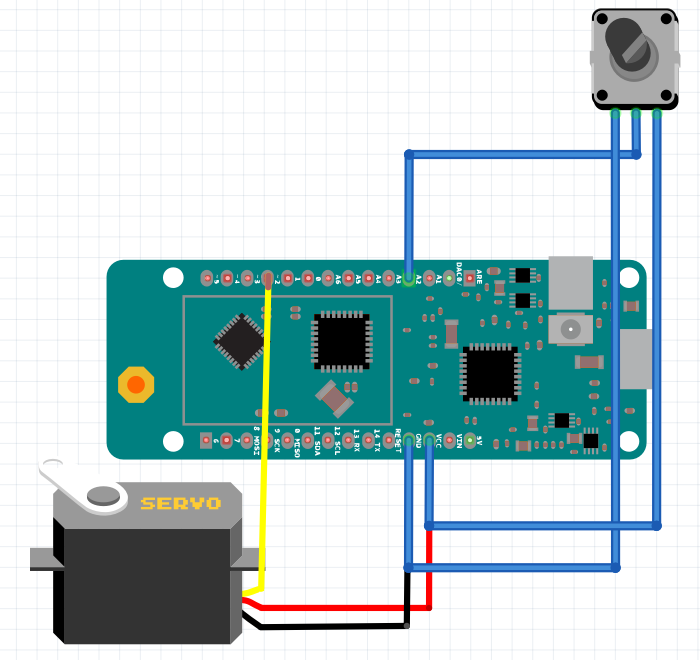
ドリルマシンまたはドレメルを使用して靴に穴を開けました。結束バンドで靴ひもをサーボに向けます。
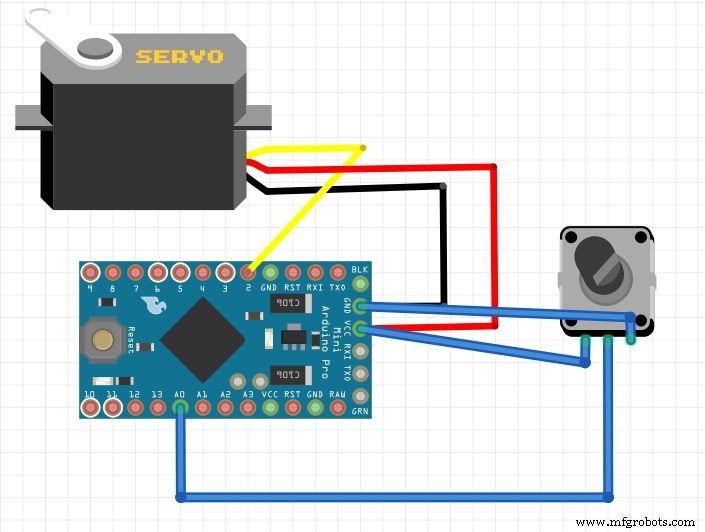
靴ひもを演出するためにさまざまなものを使用できますが、結束バンド以外は何も見つかりませんでした。サーボノブコードを使用しましたが、別のコードを使用してサーボを制御することもできます。 Arduino Pro Mini、Arduino 101、またはどちらを使用するかをGoogleでコーディングするための基本を知っておく必要があります。 (Arduino 101を買う余裕がなかったので、プロミニでプロジェクトを作成しましたが、両方で動作します)
コード FYQPAKLIW6PQ6C4.txt
ステップ4:ステップカウント <図>

数取器を使って歩数をカウントしました。このタイプの数取器を開くと、カウントボタンの2つの端子に2本のワイヤーを取り付けてプッシュボタンを取り付けることができます(ただし、これは1つの靴だけでした)。そのため、私が作成したこのアプリで、カウンターの数値と体重を入力する必要があります。このアプリは、平均消費カロリー、距離(km)、そして明らかに歩数をカウントします。
チュートリアルについて知らなかったため、このプロジェクトを作成している間は写真を撮りませんでした。
F94YI9GIW6PNCKA.apk
ステップ5:いくつかのLEDを追加する <図>
 <図>
<図> 
ここでは、スイッチと並列に3つのLEDを追加し、パワーバンクを使用して電力を供給しました。
スマートシューズのプロ:
- 電気を生成するので、携帯電話を充電できます。トレッキングに行くときに非常に役立ちます。
- 自動ひもで締める方法がわからない子供や、背中に問題があるお年寄りに役立ちます。
- 歩数を数えることで、ランナーやジョギングをすることができます。また、アプリがカロリー消費を示しているためにダイエットをしている人も役立ちます。
- そして、光は暗闇の中で見るのに役立ちます。
コメントセクションでいつでも質問できます。そして、あなたがプロジェクトが好きなら、いいねしてください。ありがとうございます!
ステップ6:これが完全に機能するビデオです!
モバイルアプリケーションでビデオを見ることができない場合は、ここをクリックしてください:リンク
より良いバージョンを作りたいのですが、これ以上プロジェクトを行う余裕がないので、誰か助けたいことがあれば私に連絡してください。ありがとう!
コード
- prominiまたはarduino101にアップロードするコード
prominiまたはarduino101 Arduino にアップロードするコード
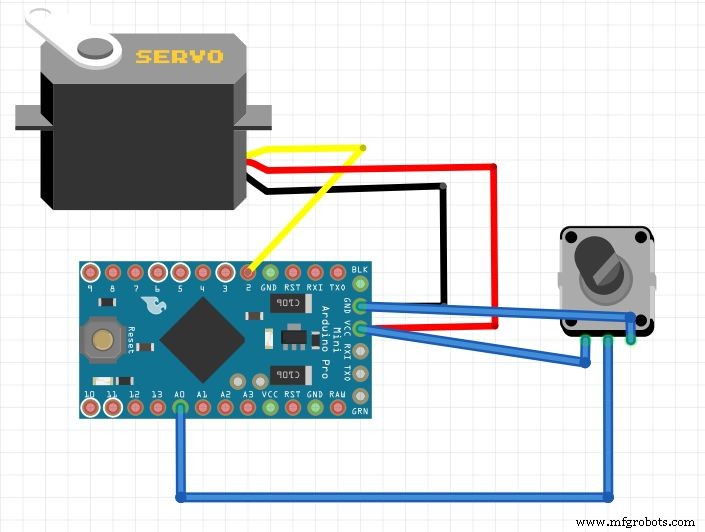
基本的に、Arduino#includeServomyservoで動作します。 //サーボオブジェクトを作成してservointpotpin =0; //電位差計の接続に使用されるアナログピン//アナログから値を読み取る変数pinvoidsetup(){myservo.attach(2); //ピン2のサーボをサーボオブジェクトに接続します} void loop(){val =analogRead(potpin); //ポテンショメータの値(0から1023までの値)を読み取りますval =map(val、0、1023、0、180); //サーボ(0から180の間の値)で使用するようにスケーリングしますmyservo.write(val); //スケーリングされた値delay(15);に従ってサーボ位置を設定します。 //サーボがそこに到達するのを待ちます}
回路図
製造プロセス