


Zen Garden CNC End Table
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
私はマクルです。私は夜、家族と一緒にモールスキンやプロジェクトのメモ帳やスケッチのアイデアを持ってテレビの前に座っています。私の会話の多くは、「_______ならかっこいいと思いませんか」というものです。私のアイデアの多くは、プロジェクトページから離れることはありません。これはしました。素晴らしいと思います。エンドテーブルに組み込まれた囲いのある禅庭です。この動きは、CNCまたは3Dプリンターから発想を得て、実際にランプ1.4(3DプリンターArduinoシールド)を使用し始め、それを構築するためのはるかに簡単な方法を考えました。
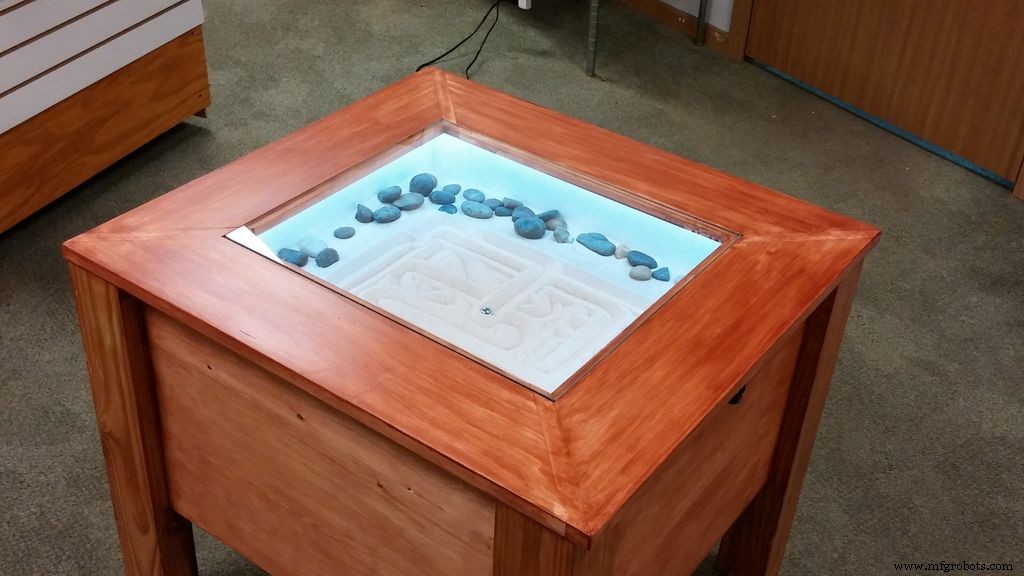
私は最終製品が平和を表すことを望みました。居間に禅を持って行きたかった。やったと思います。
私が作るものの多くは、それがそうであるように、きれいではありません。これを構築する過程で、私は妻に何を構築しているのかを正確に説明しませんでした。それは私たちの家にそれを欲しがるのに十分見栄えの良い家具になるということだけです。これをコンテキストに入れるには、私がすべてを妻と共有していることを知っておく必要があります。彼女は私の親友です。しかし、このプロジェクトでは、最終的な結果が彼女のリビングルームにあることを誇りに思うものになると彼女に約束しました。彼女はそれがエンドテーブルであることを知っていました、しかしそれはそれでした。それで、私はこのエンドテーブルが彼女にとって本当に見栄えがするように一生懸命働きました。
私は3Dプリンターを作りました。シンプルな家具(本棚、ベンチなど)も作ったことがありますが、テクノロジーを家具に組み合わせたものは作ったことがありません。だから、これは楽しいプロジェクトになると本当に思いました。
私は約6か月前にこのテーブルの最初のアイデアを思いつきました。 Tables and Desksコンテスト(および賞品としてのすべての美しい黒と黄色のツール)は、このプロジェクトを開始するきっかけになりました。
ステップ1:デザインとアイデア
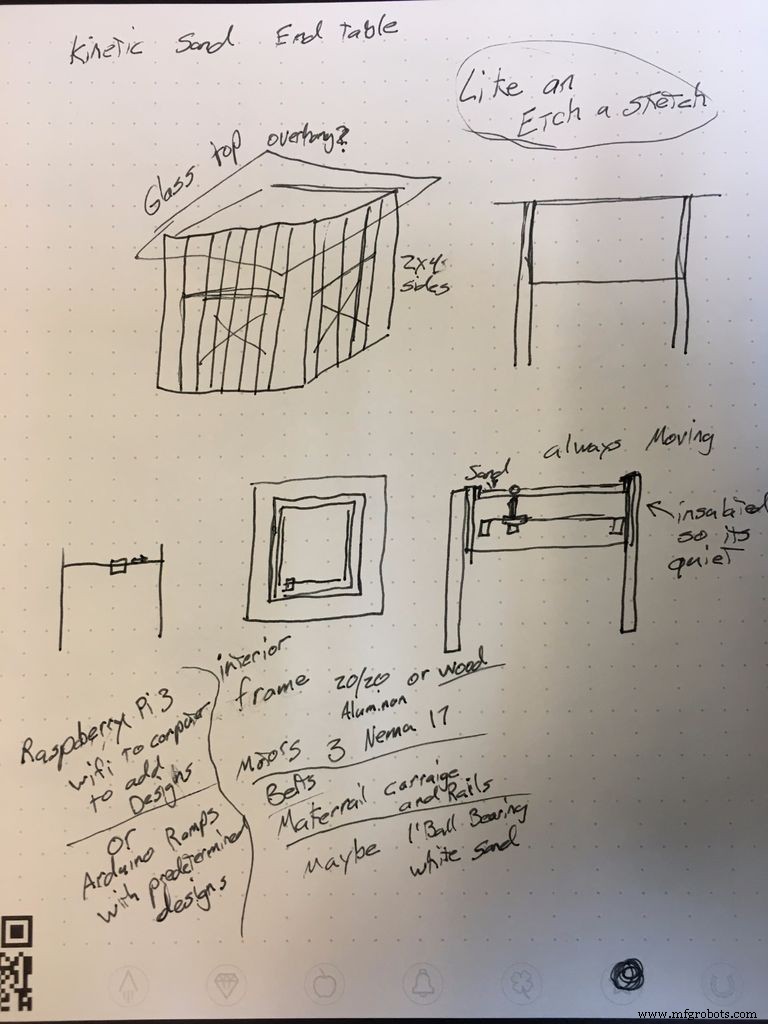
私はエンドテーブルを作りたかったのです。それは、それ自体で、またはソファの隣に座って、おそらくランプが付いているものです。私はそれを何よりも「芸術」、つまり木材への技術の注入にしたかったのです。私はいつも木製の熊手がある石庭を見ます、私はいつも彼らがとても平和であると思いました。それは本当に私がこのビルド、平和な技術を注入したアートで目指していたものです。
これを実現するために、z軸のない3Dプリンターに似たガントリーを使用することを考えました。このようにして、磁石を使用して、ある種の媒体、おそらく砂を介してボールベアリングを駆動することができました。また、写真やデザインを「印刷」するようにプログラミングすることも考えました。
Arduinoを2つのステッピングモータードライバーといくつかのかなり単純なコードで使用するつもりだと思います。コードに設定スペースをプログラミングするのではなく、両方の軸の最小値と最大値にエンドストップをインストールしただけなので、0,0はモーター停止をトリガーし、XXX、XXX最大はモーター停止をトリガーします。これにより、プログラミングがはるかに簡単になります。
ステップ2:必要な部品と材料


さて、これは私が使用したパーツのリストです。これは、同じパーツを使用する必要があるという意味ではありません。これを作成するために使用したパーツの概要を説明したいと思います。
- ウッド。私は基本的に木の箱に行き、樹上の家から回収した4x4と、妻が窓のトリムのために購入した厳選された松を見つけました(彼女にもっと購入すると約束しました)。私は見つけたすべての大きな木片を探し出し、それらを私の店に持ってきました。また、数年前にメナーズから購入した白樺合板を別のプロジェクトで使用しました。
- 1/8 MDF上部とベースの間にこれを使用して、上部に接着剤を塗布しました。振り返ってみると、私はおそらくそれをスキップすることができたでしょう、そして私が再びそれをするならば、私はそうするでしょう。
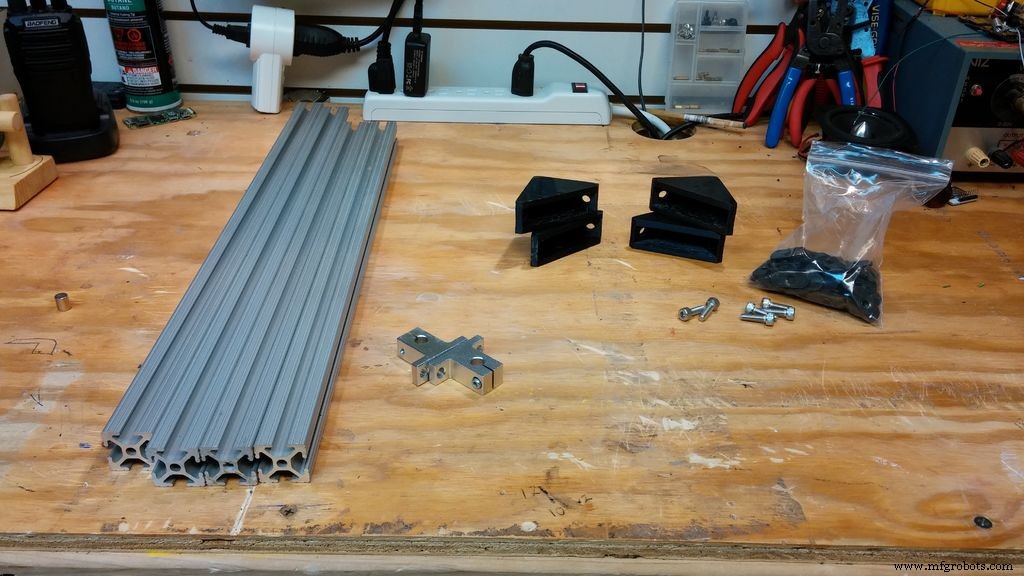
- 2020アルミニウム押し出し。ガントリーのフレームを作るのにこれを使いました。
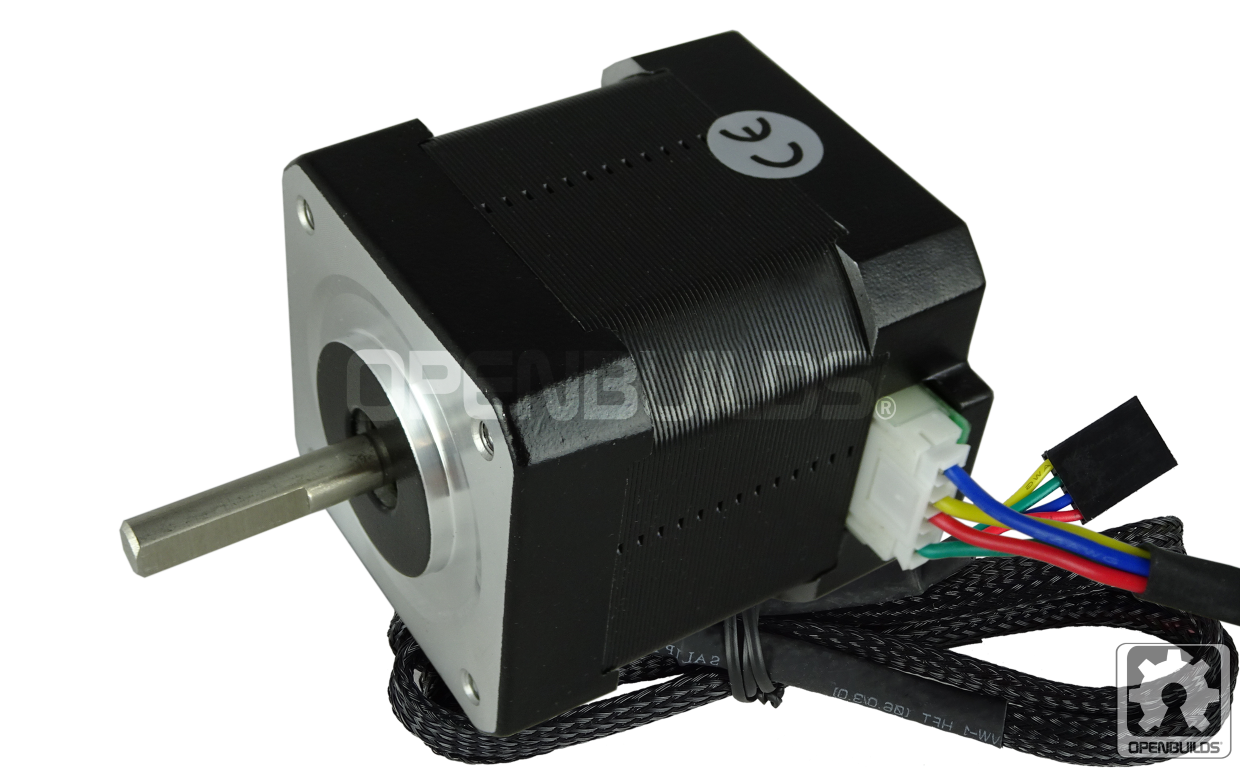
- 2つのステッピングモーター2軸の移動に12.99ドル。
- ガントリームーブメントに使用されるArduinoUNO。
- 動きを制御するために使用されるArduinoUNOジョイスティックモジュール。
- 8mmリニアモーションスムースロッドx4
- 8mmリニアシャフトガイドマウントx8
- 3Dプリンターの部品私は過去に多くの3Dプリンターを製造しており、これらの部品をたくさん手元に置いています。結局、ベルト、滑らかなロッド、滑らかなロッドベアリング、その他の3Dプリンタータイプの部品を使用することになりました。
- クレッグポケットホールジグこれは絶対に必要というわけではありませんが、あらゆる種類の家具の作成が非常に簡単になります。このプロジェクトでは、トップで使用し、トップをベースに取り付けました。
- 1/4インチ板ガラス---地元のガラスとペイントストア-これは安全ガラスではなく、壊れた場合に危険なほど鋭い破片を作成する可能性があることに注意してください。しかし、このプロジェクトでは、強度と厚さが必要でした。
- 白色LEDストリップとRFリモート
- LM317電圧変換器
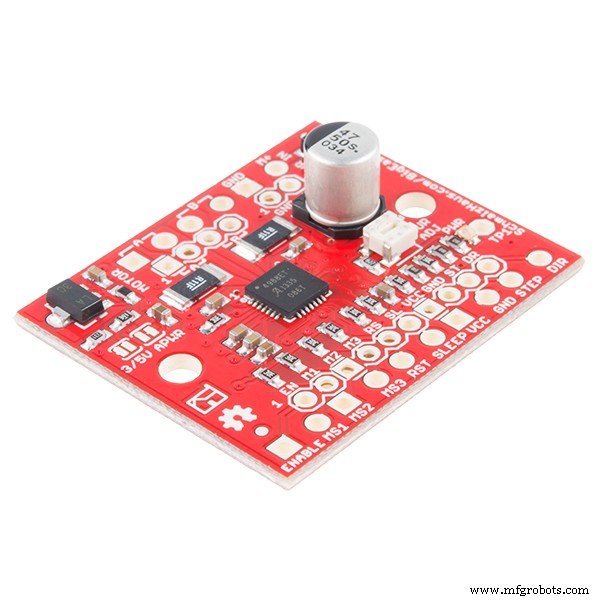
- A4988ステッピングモータードライバーx2
- 220mf16vコンデンサx2
- 12ボルト5アンペア電源
- 3/4インチボールベアリング
- 25ポンドの白いプレイサンド
- スムースリバーロックの2つのバッグ
- ネオジムラウンドベースマグネット
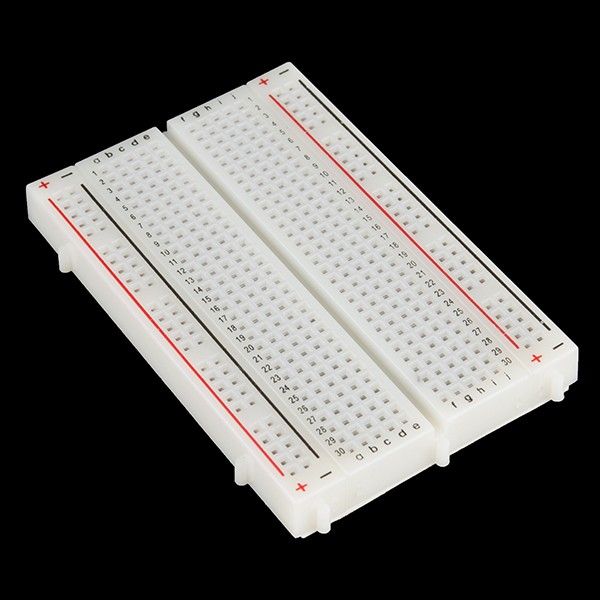
- ブレッドボードのプロトタイピング
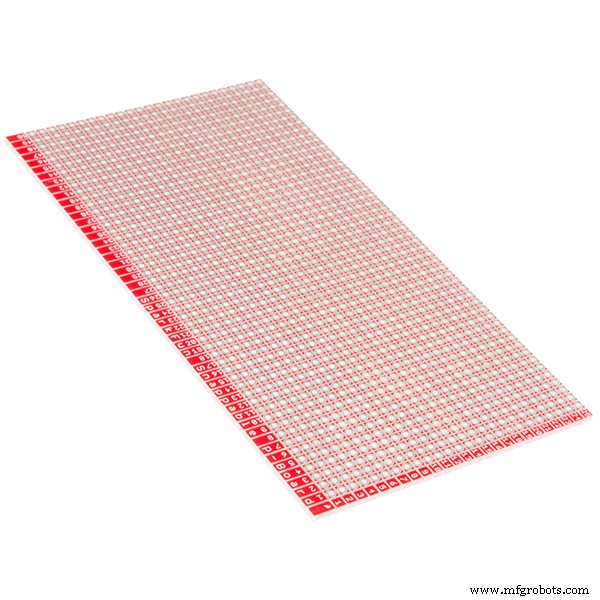
- パーマボードはんだブレッドボード
- いくつかのプラスチック製コンジット2穴ストラップ、またはガントリーをトラップドアに固定するその他の方法。
ステップ3:ガントリーを組み立てる
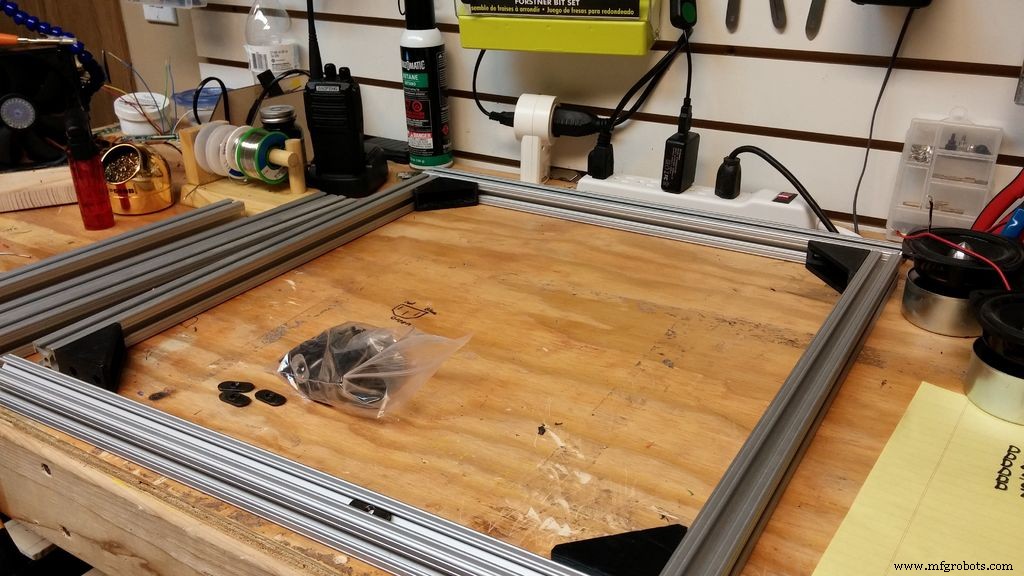


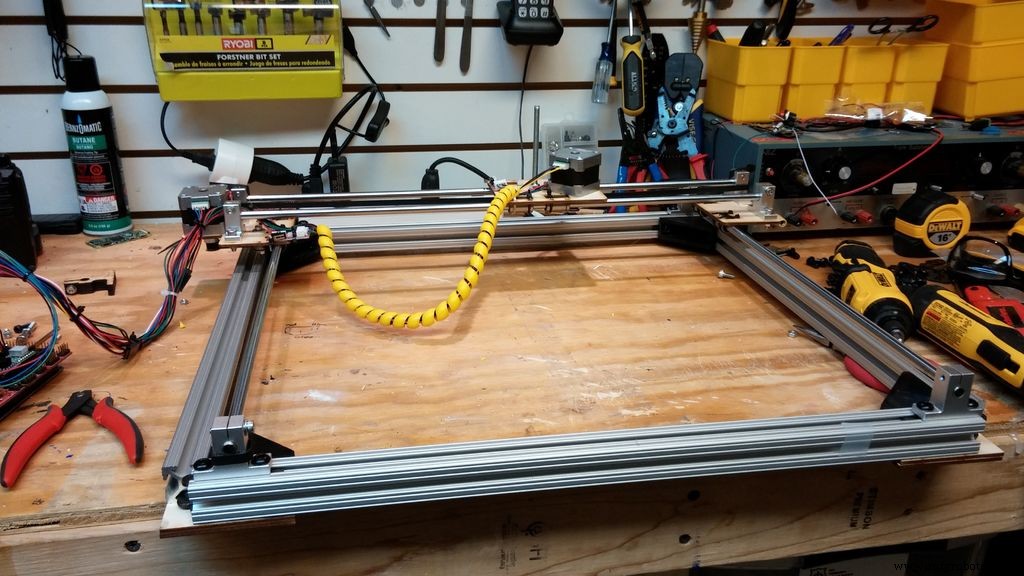
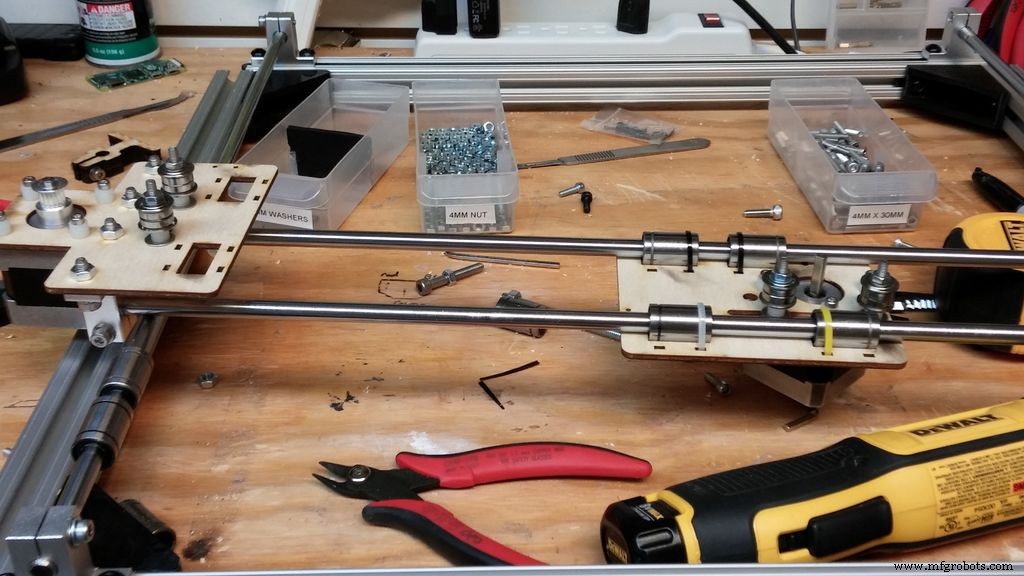
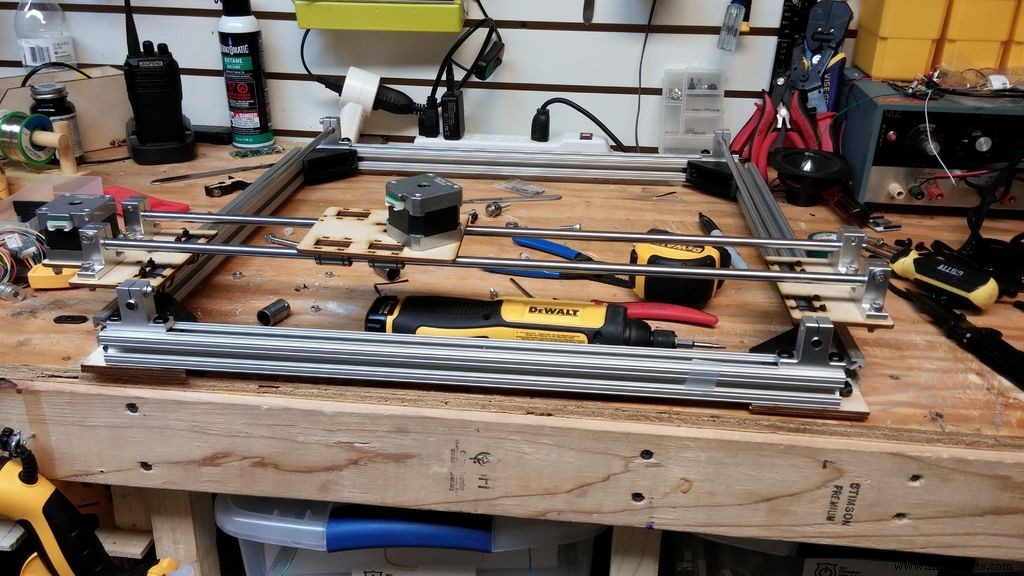
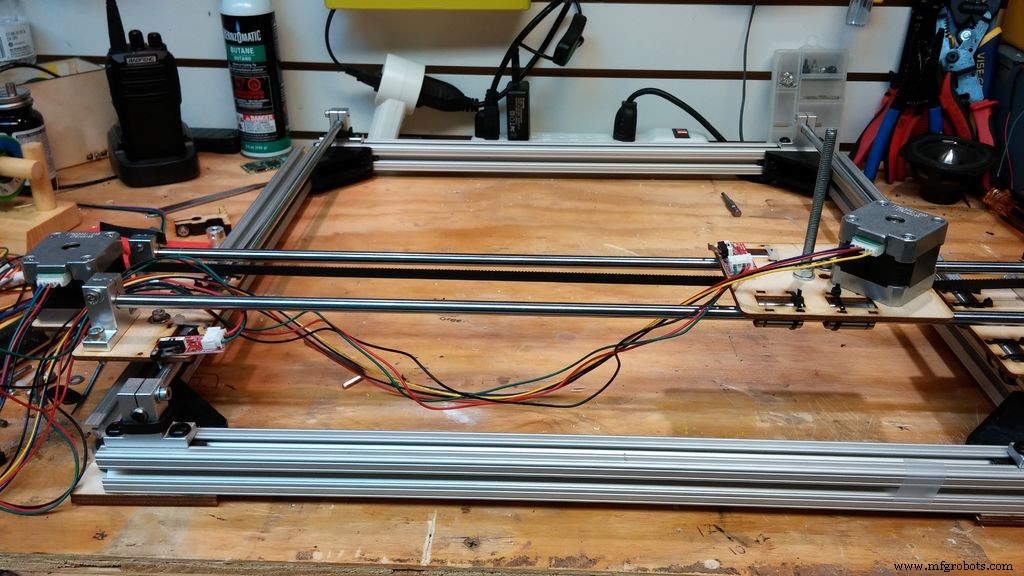
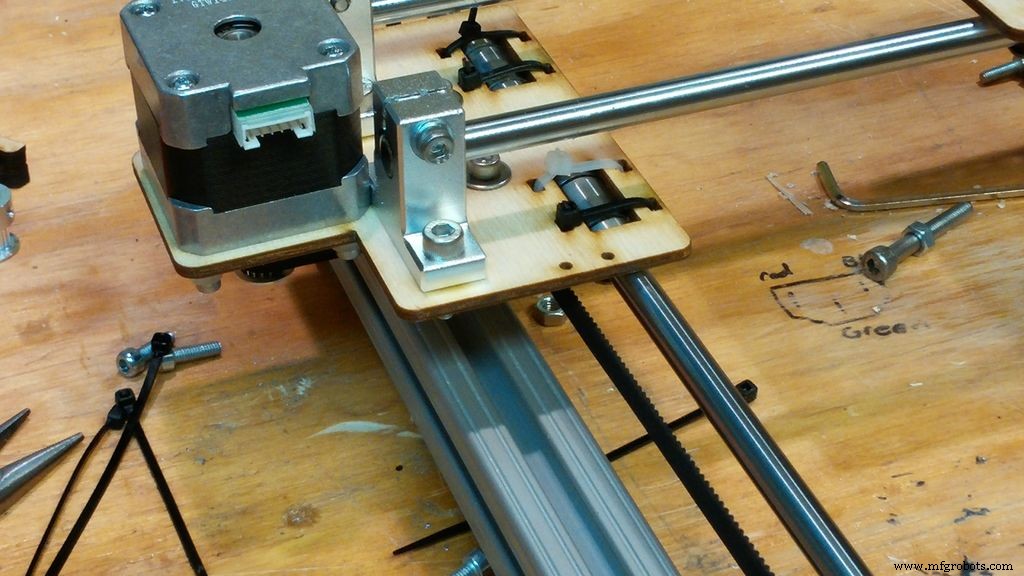
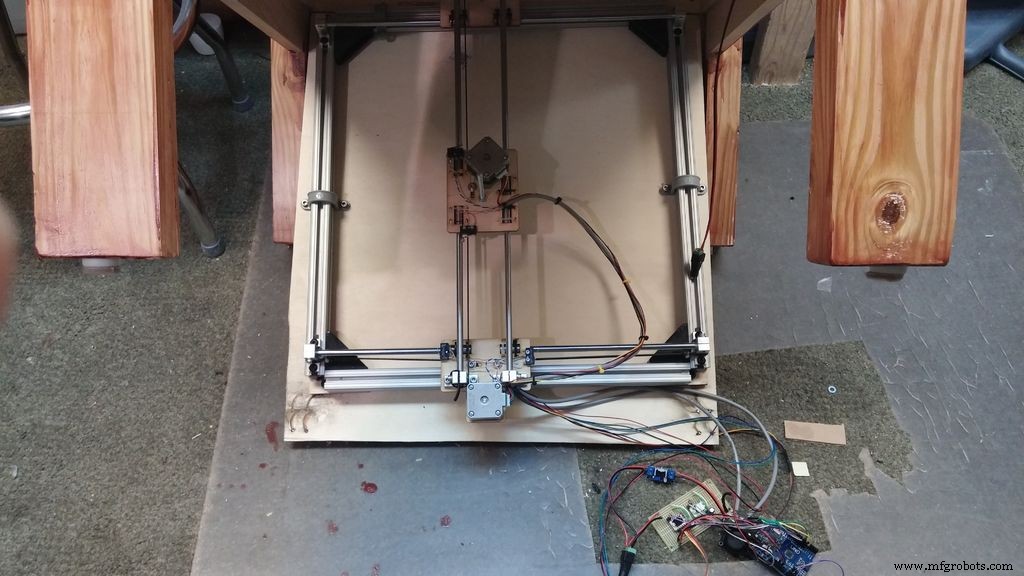
私はいくつかの大まかな図面から始めて、ガントリーを作りました。これはおそらくこれを構築するための最も効率的な方法ではありません。これは、他のビルドなどで残ったパーツを使用しようとしていたことを念頭に置いて、私が行った方法です。別のビルドから20/20のアルミニウムの押し出しが残っていたので、それをガントリーのフレームに使用しました。角かっこをデザインして3D印刷し、それらのファイルをここに含めました。
x軸とy軸のレーザーカットパーツも同梱しました。写真を注意深く調べて、キャリッジと個別の軸をどのように組み立てたかを正確に確認してください。ガントリーを組み立てる方法はたくさんあるので、キャリッジを組み立てる方法はおそらく最善の方法ではありませんが、他のいくつかのビルドでこの方法を使用しており、信頼性が高く正常に機能しているようです。
FTY8AKAIVO3T4X1.dxf FZUAWWRIVO3T4WZ.cdr FVXPPAIIVO3T86T.stl
ステップ4:回路を組み立てる
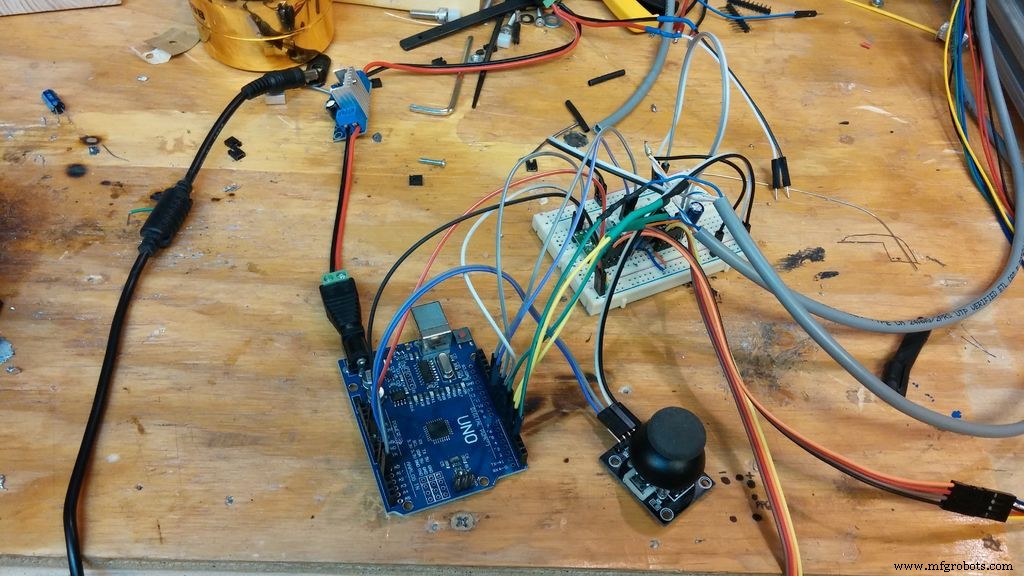
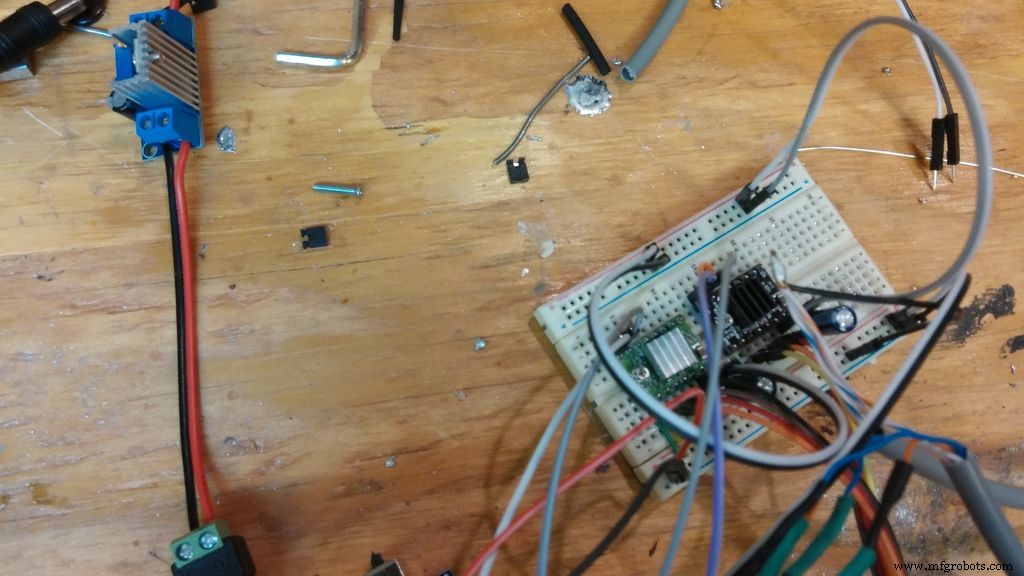

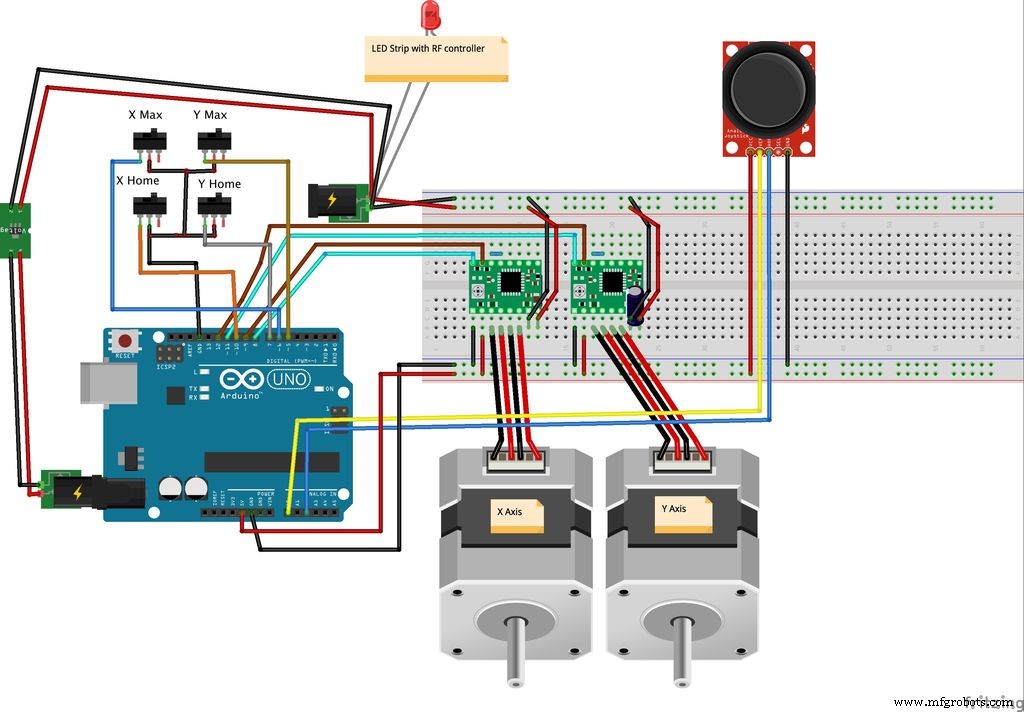
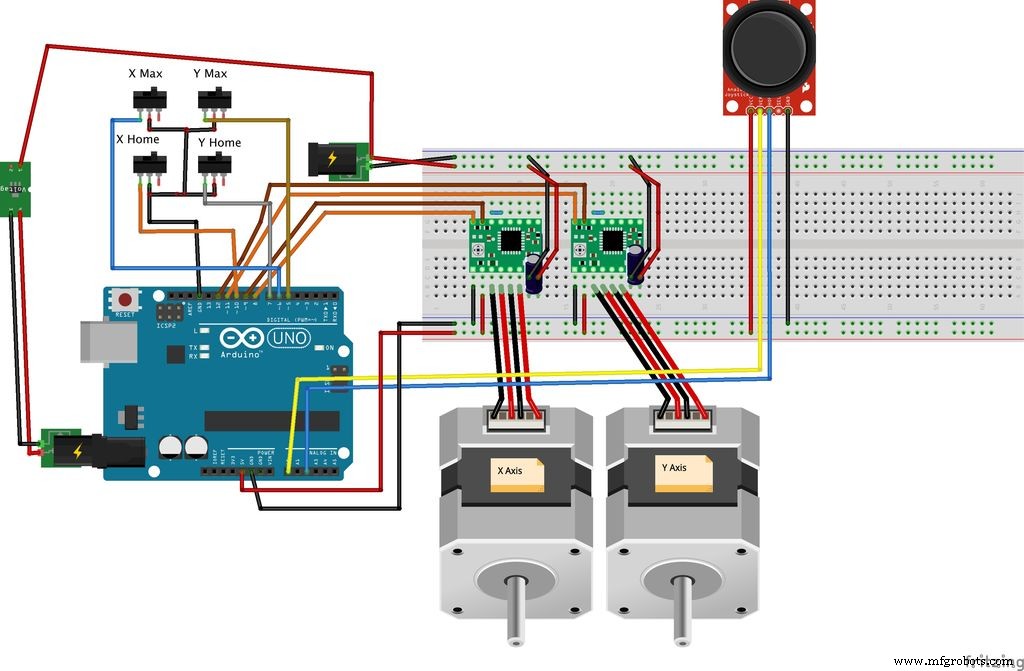
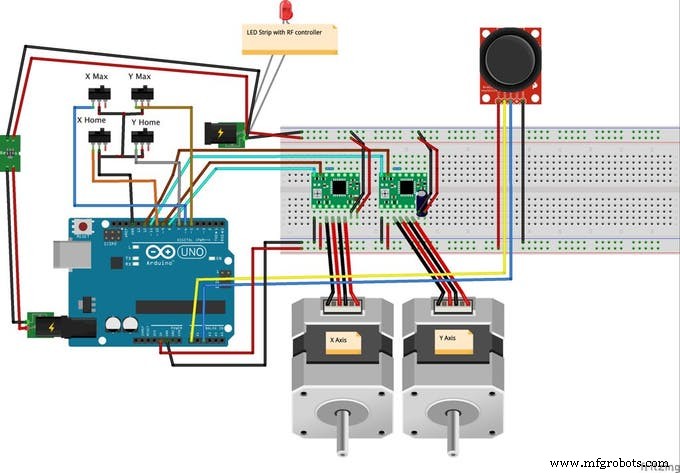
私が最初にしたことは、プロトタイプのブレッドボードに回路を組み立てることでした。すべてが希望どおりに機能することを確認したら、それをはんだボードに移しました。組み立てに役立つように、上記のフリッツ図を含めました。
ステップ5:コード
このために作成したコードは本当に単純です。 x軸とy軸の両方の最小値と最大値の両方にエンドストップを設定したため、ガントリーのサイズを決定するコードには何もありません。サイズはコードで設定されていないため、デザインが私のものよりも小さいか大きいかは関係ありません。コードで何も調整する必要はありません。コードはここに.TXT形式と.INOであるため、ダウンロードできます。
F5577MZIW6PMIF4.cpp FKOB89KIW6PMIF6.h FO9WJRBIW6PMIFY.ino F1K7N72IW6PMIGQ.zip FVI0A1ZIW6PMIGS.txt F9BIZS5IW6PMIGV.txt FGBWKEAIW6PMIGW.txt
ステップ6:動きをテストする
コードをインストールした後、徹底的にテストしました。エッチ・ア・スケッチのように、斜めの動きを水平、垂直、水平の順にしたかったのです。それはうまくいくようです。そこで、Arduinoへのすべての接続をはんだ付けして永続的にし、テーブルにインストールする方法を確認します。
ステップ7:実際のテーブルパーツ
それで、私は自分の頭の中にあるものをどのように構築するかを決定しようと試みました。私が考えていたのは、下部にメカニックが見えないように隠された、一種の2レベルのボックスでした。それは棚の下に隠されたジョイスティックによって制御されます。それを超えて、私は本当にそれをどうやってやろうとしているのか分かりませんでした。
木の山を探した後、私は別のプロジェクトから回収した4x4を見つけました、そして私は全体的にかなり素晴らしいいくつかの選択された松を見つけました。それで、私がこれから取るものを取り替えることを上司に約束した後、私は材木を店に持って行き、建設を始めました。
ステップ8:バイレベルボックスを作成する

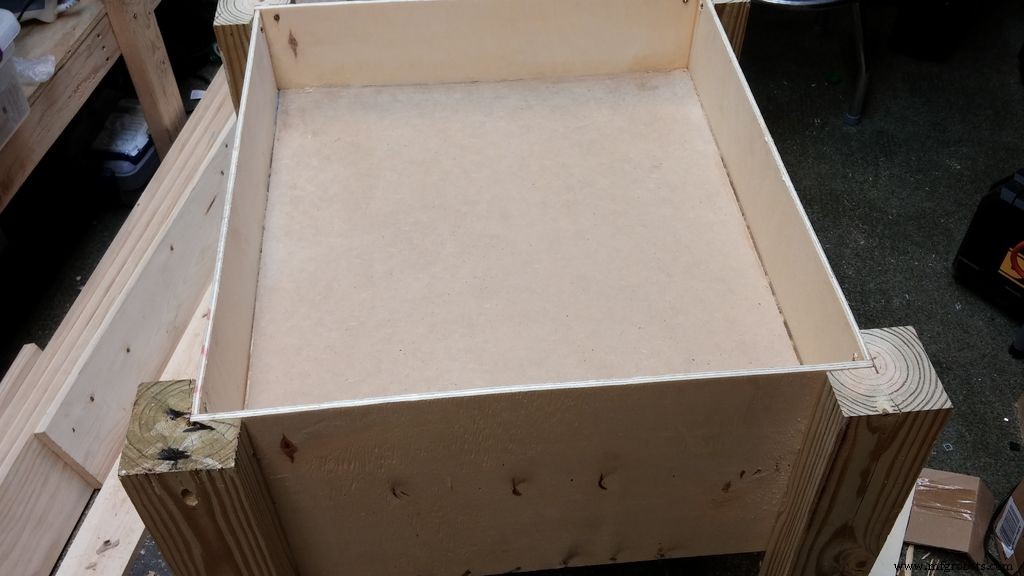




1/4インチの合板を測定して切断した後、接着剤が座っている間にそれを一緒に保持する新しい方法を試してみたかったのです。段ボールを角に熱接着しました。この方法は、ボックスを一緒に保持するための他の手段を実施するのに十分な時間、ボックスを一緒に保持するので、うまく機能しているように見えました。上下の仕切りを作り、水平になったことを確認した後、ガントリーを保持するテーブルの下部を外して維持できるように、ピアノのヒンジを固定しました。
ステップ9:テーブルレッグを作成する


テーブルの脚には、子供のおもちゃの部屋にあったプレイハウスから引き出した4x4の松を再利用したいと思いました。まず、4x4にネジや釘/ステープルがないことを確認しました。私は4x4を測定して425インチのセクションにカットしました。それから私はペンキを取り除きそしてそれをきれいにするために何回も平野を通り抜ける4本の足を走らせました。
平野を数回通過した後、直定規とクランプを使用してその場しのぎのジグを作成し、テーブルソーのようなスキルソーを使用できるようにしました。それはうまく機能し、私の目的にうまく機能する4本の清潔で滑らかなL字型の脚を残しました。
ステップ10:サイドの取り付け

足を付けた後、私は側面を持って出発しました。十分な注意深い測定が続いた。できるだけ隙間がないように、できるだけ近くにいる必要があります。ピースを所定の位置に接着し、バイレベルボックスの下側から数本のネジを締めました。
ステップ11:砂砂と砂をもう少し


形のあるものを作るときは、より肉厚の(80-120グリットのような)サンドペーパーから始めて、より細かい(<200グリット)サンドペーパーに向かって、無償のサンディングをお勧めします。プロジェクトが完了すると、欠陥を取り除くために費やした時間が報われます。
ステップ12:LEDライトの取り付け

トップがどこにあるかがわかったら、トップとベースの間に1/8インチのMDFを配置しました。ピースが置かれる場所に印を付け、それを裏返し、LEDライトストリップをジップタイとホットグルーで下側に固定しました。私の経験から、それ自体で熱を発生させる可能性のあるもの(つまり、ライトストリップ)を固定するときに、それ自体でホットグルーに完全に依存するのは愚かです。私は穴をあけて、ライト用の電源線をバイレベルボックスの下側に通しました。ステッピングモーターと同じ12Vでライトを動かすつもりでしたが、ライトがモーターをブーンという音を立てるという問題があったので、ライトに独自の12V電源を与えました。
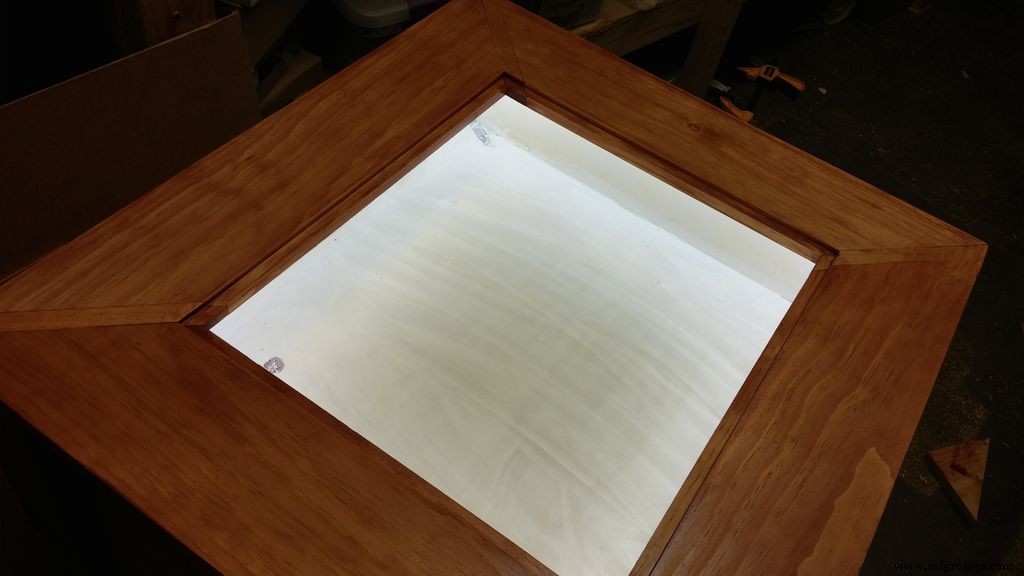
ステップ13:トップの取り付け
私はマイターを切る経験があまりありません。私は生まれつきの大工ではありません。しかし、多くの試行錯誤の末、私は格好良いトップを作ることができました。パーツステップで説明したクレッグジグを使用して、トップの4つの側面を固定しましたが、これは非常にうまく機能しました。
上部のピースを測定するときは、正しく測定するようにしてください。小さすぎるよりも、大きすぎてもう一度カットするか、砂を塗る方が良いです。上部のピースをカットし、それらが希望どおりに収まるようになったことを確認したら、ガラスがぴったりと収まるように個々のピースを配線します。ガラスに合うようにルーターの奥行きを確認してください。私の場合、ガラスは1/4インチでした。
トップを接着してネジ止めしたら、脚の後ろにあるクレッグジグを使ってベースにネジ止めしました。
私は地元の車の窓修理店に電話して、開口部より1/16小さい1/4インチの板ガラスを注文しました。また、手を切らないように端を研磨してもらいました。岩を並べ替えるためにガラスを取り外せるようにしたいという理由だけで、ガラスを固定するためにアクリルを使用することはありません。
ステップ14:コンディション、ステイン、ポリ、サンド、ポリアゲイン
松はとても多孔質な木なので、しみになりたくなかったので、木質のプレステインコンディショナーを使って汚れを均一にしました。次に、ミンワックスのナチュラルチェリーポリステインを塗り、乾かしました。翌日、私は戻ってきて、320グリットのサンドペーパーでテーブルを軽く研磨し、次にポリステインをもう一度塗りました。これをもう一度行う必要がある場合は、別々に染色してポリ化します。ドリップマークなどを残さないように染みやポリコーティングを施すのは悪夢でした。また、暗くしたい場合は、再度染色して暗くすることはできません。結果に満足するまで、私はそれを紙やすりで磨き、それを数回塗り直しました。ポリステインを再び使用することはないと思います。
ステップ15:電子機器のインストール

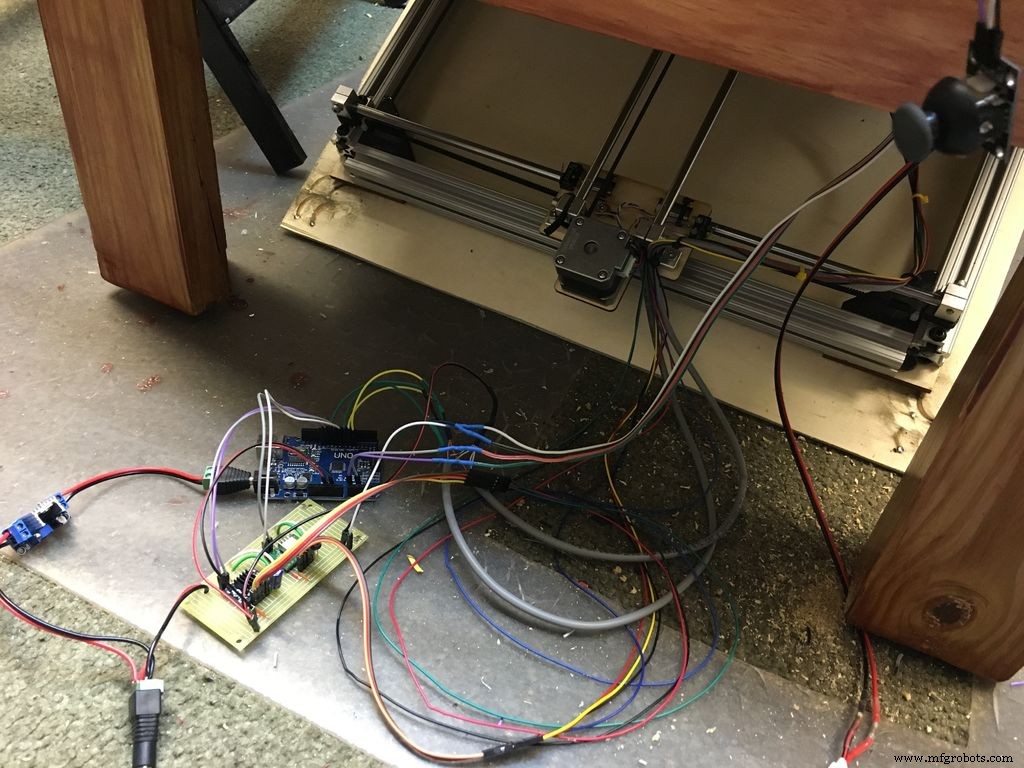
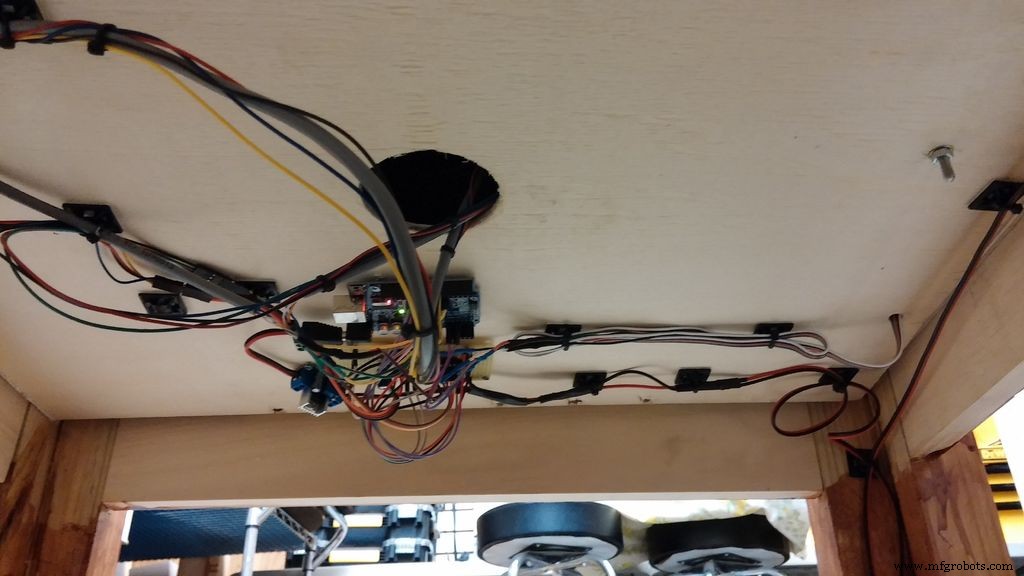


ガントリー全体をトラップドアに取り付け、ドロップダウンして作業、保守、またはアップグレードできるように、下部にトラップドアを構築しました。プラスチック製コンジットの2穴ストラップを使用して、ガントリーをトラップドアに取り付けました。 2020年の押し出しの周りにストラップを取り付けました。これはうまくいくようです。
Arduinoとブレッドボードを取り付ける場所まで、いくつかの異なるルートを試しました。結局、トラップドアの下部の中央付近に穴を開け、すべてのケーブルをそこに通して、電子機器をテーブルの下に取り付けました。
ジョイスティックを取り付けるとき、どうやって取り付けるかを長い間考えていました。正直なところ、賢いことは何も思いつかなかったので、テーブルの縁の下に接着しました。ジョイスティックのケーブルをできるだけ隅まで押し込み、それも熱接着しました。これは最も堂々とした解決策ではありませんが、隣を這わない限り実際に見ることはできないので、満足しています。
下側に小さなネジでボードを取り付け、可能な限りすべてを片付けようとしました。また、電源プラグを後脚の裏側に移動して、所定の位置に接着しました。
ステップ16:ツールヘッドの「マグネットヘッド」?

使用したいボルトにマグネットを取り付ける方法がわかりませんでした。 Z軸を簡単に調整できるので、ボルトがうまくいくと思いました。私がやったことは、3/4インチのダボの短い長さ(1-1 1/2インチ)をカットし、ボルトがはまる穴を開けることです。それから私はその上に磁石をねじ込みました。これで、下部のナットを緩めることで上下に調整できます。
ステップ17:ロックガーデンを作る




電子機器が設置されたら、私はロックガーデンの作成に着手しました。どれくらいの砂が必要かわからなかったので、25ポンドの砂の箱を購入しました。後から考えると、私は5〜10ポンドで逃げることができたと思います。砂のほとんどはまだ箱の中にあります。砂を広げた後、少しボールを走らせました。ボールが転がったときに箱の底が見えないことを確認したかったのです。私は砂を追加し、満足のいく砂の深さが見つかるまでテストを続けました。
それから私は端の周りに滑らかな川の岩の2つのバッグを追加しました。均等に広げてみました。川の岩を接着することも考えていましたが、将来的には再配置できる方がいいと思いました。
ステップ18:実行中のテーブル





悲しいかな、テーブル、彼女は動きます。テーブルを動かした後、私はただそこに立って、ボールをあまりにも長く運転しました-笑。金属のボールが砂を押しのけるのを見るのは非常に嬉しいことです。この点に到達するまでには長い道のりでした。このテーブルが私が想像したとおりに動くのを見るのはとても素晴らしいことです。
ステップ19:すべて完了
これは長く大変なプロジェクトでした。でもとても楽しかったです。
コード
- code.ino
code.ino C / C ++
/ * *簡単なデモ、どのドライバーボードでも動作するはずです* *示されているようにSTEP、DIRを接続します* * Copyright(C)2015 Laurentiu Badea * *このファイルは、MITライセンスの条件の下で再配布できます。 *このライセンスのコピーは、ファイルLICENSEのこのディストリビューションに含まれています。 * / / * * Ernest EGarnerによってStepperDriverライブラリから見つかったものとして編集*日付:2016年11月20日* *コードの説明:* Ernest James Garner forInstructablesによって作成されたzenテーブルの基本的なx / yガントリーを制御するために使用されます.com * /#include#include "BasicStepperDriver.h" //#define DEBUG //回転あたりのモーターステップ。ほとんどのステッパーは200ステップまたは1.8度/ step#defineX_MOTOR_STEPS 200#define Y_MOTOR_STEPS 200 //モーターのホームへの方向//オプション1(順方向)//-1(逆方向)#defineSTEP_FORWARD 1#define STEP_REVERSE -1#define X_DIR_HOME STEP_FORWARD#define Y_DIR_HOME STEP_FORWARD //完全な機能に必要なすべてのワイヤ#defineX_MAX_PIN6#define X_HOME_PIN 7 //ホームピン。#defineX_DIR_PIN 8#define X_STEP_PIN 9#define X_ANALOG_PIN A0#define Y_MAX_PIN 5#define Y_HOME 11#define Y_STEP_PIN 12#define Y_ANALOG_PIN A2 //マイクロステッピングは外部で設定されているため、これが選択したモードと一致することを確認してください// 1 =フルステップ、2 =ハーフステップなど#defineMICROSTEPS 1 // 2線式基本構成、マイクロステッピングはdriverBasicStepperDriverに配線されていますx_stepper(X_MOTOR_STEPS、X_DIR_PIN、X_STEP_PIN、X_HOME_PIN、X_MAX_PIN); BasicStepperDriver y_stepper(Y_MOTOR_STEPS、Y_DIR_PIN、Y_STEP_PIN、Y_HOME_PIN、Y_MAX_PIN); int x_position =0; int x_position =0; (){#ifdef DEBUG Se rial.begin(9600); #endif / **ターゲットモーターのRPMを設定します。 *これらのモーターは約200rpmまで実行できます。 ※高すぎると高音が鳴り、モーターが動かなくなります。 **これらのモーターをゆっくりと動かしたい。 * / x_stepper.setRPM(100); y_stepper.setRPM(100); / **選択したマイクロステップレベルをドライバーに伝えます。 *不一致の場合、モーターは選択したものとは異なるRPMで移動します。 * / x_stepper.setMicrostep(MICROSTEPS); y_stepper.setMicrostep(MICROSTEPS);} void loop(){/ **次数表記を使用してモーターを1回転させる* / // 1024/2 =512 // 512-40 =472 // 512 + 40 =552 x_analog =analogRead(X_ANALOG_PIN); //ジョイスティックが反転し、HOMEが押されていない// if((x_analog <472)&&(digitalRead(X_HOME_PIN)==HIGH)){if((x_analog <472)){x_stepper.move(-40); } else if((x_analog> 552)){x_stepper.move(40); } #ifdef DEBUG Serial.print( "X:"); Serial.print(x_analog); //Serial.print(x_stepper.getDirection()); #endif y_analog =analogRead(Y_ANALOG_PIN); // if((y_analog <472)&&(digitalRead(Y_HOME_PIN)==HIGH)){if((y_analog <472)){y_stepper.move(-40); } else if((y_analog> 552)){y_stepper.move(40); } #ifdef DEBUG Serial.print( "Y:"); Serial.println(y_analog); //Serial.getDirection(y_stepper。#endif}
カスタムパーツとエンクロージャー
fty8akaivo3t4x1_u1xz65PyoT.dxf fzuawwrivo3t4wz_PdKRLpvu3f.cdr 回路図
製造プロセス