


必要な製造セルはこれだけですか?
すべてを行うことができる製造セルが 1 つだけ必要だったと想像してみてください。それが、研究者チームが RoboDK で行っていることです。
現在どのように部品を製造しているか考えてみてください。
工程が多いですね。 1 つのセルが原材料を使用可能なワークピースに変えます。別のセルが部品の大まかな形状を切り出し、その後、細かい加工を完了します。さらに別のセルが表面仕上げを行います。最終的に、あなたの職場は機械でいっぱいになり、オペレーターは追いつくためにあちこち走り回ることになります.
これらすべての段階を完了するのに 1 つのセルがあれば便利ではないでしょうか?
これは、研究者グループが EU の Horizon 2020 資金調達プログラムの最近のプロジェクト提案で取り組むことを決定した問題です。
ご紹介… HYROMAN
HYROMAN は、2017 年に提出された EU プロジェクトの提案の名前でした。
EU (欧州連合) は、研究プロジェクトへの資金提供をラウンドに編成しています。現在のラウンドは Horizon 2020 と呼ばれ、これまでのところ、過去 5 年間で 600,000 件を超える申請が提出されています (そのうち、資金提供されたのはわずか 3% です)。
HYROMAN は HYbrid RObotic MANufacturing の略です。このプロジェクトの背後にあるアイデアは、1 つのロボット セル内ですべての製造段階を達成できるプラットフォームを開発することです。
プロジェクトの提案では、HYROMAN は「機敏で費用対効果の高い生産を可能にする破壊的に革新的な製造システムを構築するつもりである」と説明されています。
HYROMAN プラットフォーム
提案されたプロジェクトの中核は、「高度なロボット システムである HYROMAN プラットフォーム」であり、生産時間、製造現場のスペース、および必要な設備投資を最小限に抑えます。
これは、3 つのコア製造ステップを 1 つのセルに結合します:
- アディティブ マニュファクチャリング — セルは、金属片から作業するのではなく、「デポジション ツール」(3D プリント) を使用してパーツの大まかな形状を構築します。この段階を完了するために、ロボット エンド エフェクターとして押出ツールが取り付けられます。
- 除去製造 — 次に、セル内の 2 番目のロボットが機械加工ツールを使用して、パーツから余分な材料を取り除きます。
- 革新的な製造 — 最後に、2 番目のロボットは、表面処理エンド エフェクター用の機械加工ツールを切り替えます。これは、パーツ表面の微細構造を変換し、最終的な品質にするために使用されます。
実際には、これら 3 つの段階すべてを 1 台のロボットで完了することができます。ただし、アディティブ マニュファクチャリングは他の 2 つのステップよりもはるかに時間がかかるため、2 台のロボットを使用することは理にかなっています。おそらく、セルの全体的なスループットを向上させるために、3D プリント段階で複数のロボットを使用することは理にかなっているかもしれません.
HYROMAN が RoboDK を使用する方法
HYROMAN の優れたアイデアの 1 つは、プログラミング プラットフォームとして RoboDK を使用していることです。 RoboDK を使用すると、同じ環境内で 3 つのプログラミング手順すべてを非常に簡単に実行できます。
彼らの提案のために、チームはソフトウェアを使用して細胞の第 1 段階 (3D 印刷) のシミュレーションを構築しました。これを行うために、彼らは 3D プリント ウィザードを使用しました。ただし、これはほんの始まりにすぎません。 RoboDK の統合プログラミング ウィザードを使用すると、3 つの段階すべてを簡単に達成できます。
HYROMAN のチームがアディティブ、サブトラクティブ、およびトランスフォーマティブ マニュファクチャリングに同じソフトウェアを使用する方法を次に示します。
アディティブ マニュファクチャリング — 3D プリント ウィザード
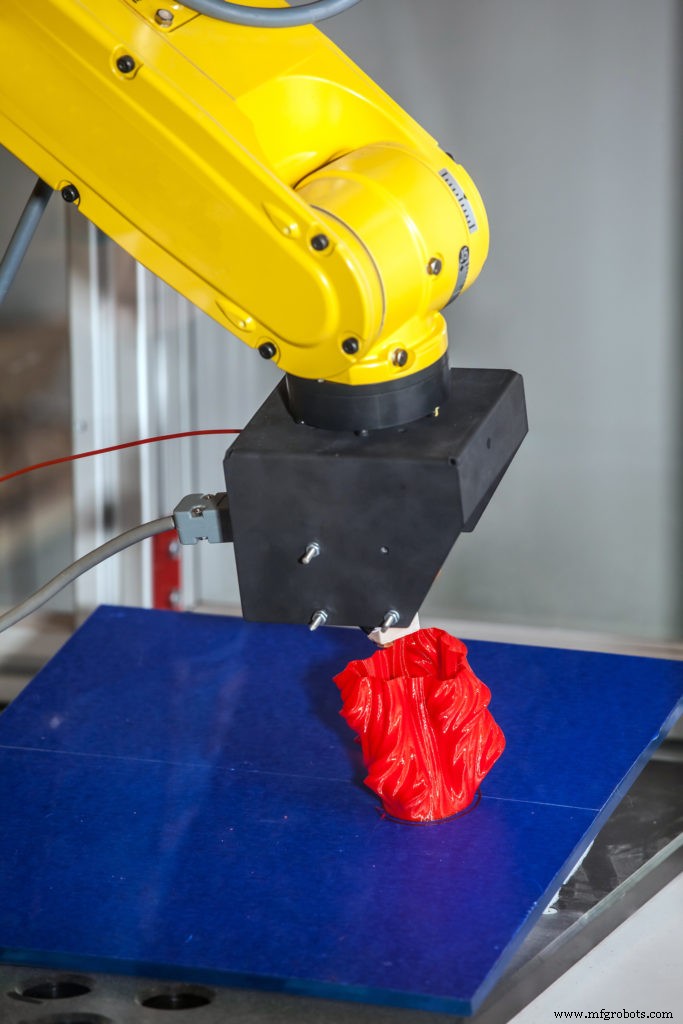
最初のステップは、アディティブ マニュファクチャリングを使用してパーツの大まかな形状を 3D プリントすることです。
RoboDK の 3D プリント ウィザードを使用すると、CAD モデルを一連のロボット命令に簡単に変換できます。入力として GCODE ファイルが必要です。このファイルは、フリー ソフトウェア Slic3r で生成できます。
3D プリントには多くの可能性があります。最近、RoboDK を使用して食品を 3D プリントしているチームについて報告しました。また、建築用途向けのコンクリート 3D プリントも見られました。
次の RoboDK での 3D プリントの例を参照し、実際の手順についてはドキュメント ページを確認してください。
除去製造 — ロボット加工ウィザード
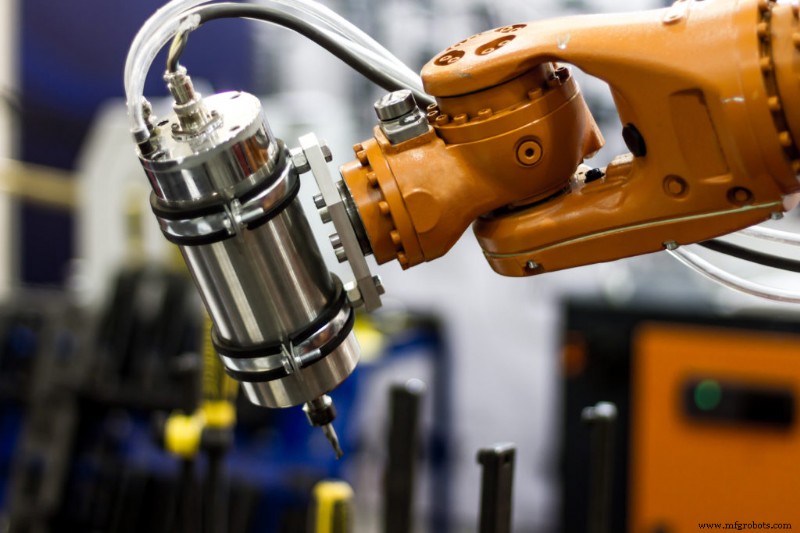
2 番目のステップは、ロボット対応の工作機械を使用してパーツの細部を加工することです。
RoboDK の Machining Wizard は、3D プリントと非常によく似たプロセスに従います。 GCODE を入力として使用するか、別のタイプの NC ファイルを使用します。ただし、材料を追加する代わりに、ツールを使用して材料を削除します。
ロボット加工がビジネスにどのように役立つかについての詳細は、記事「ロボット加工が生活を簡素化する方法」をお読みください。
次の RoboDK でのロボット加工の例を参照し、実際の手順についてはドキュメント ページを確認してください。
トランスフォーマティブ マニュファクチャリング — カーブ フォロー ウィザード

最後のステップは、表面処理を行い、最終製品の材料特性を改善することです (例:耐摩耗性、はんだ付け性、耐腐食性などを改善するため)。
ロボットの正確な動作は、表面処理の特定の方法によって異なります。ただし、多くの方法では、ロボットが曲線経路を移動するか、個々のポイントに移動する必要があります。これには、RoboDK のカーブ フォロー ウィザードとポイント フォロー ウィザードが最も役立ちます。
これらの動きにより、表面仕上げアプリケーションは検査や塗装作業と非常に似たものになります。これについては、当社の記事「ロボット検査の製造者ガイド」で見つけることができます。
次の RoboDK での曲線追跡タスク (ペイント) の例を参照し、実際の手順についてはドキュメント ページを確認してください。
RoboDK でプロセスを改善する方法
HYROMAN は素晴らしいアイデアです。ただし、利点を確認するために、同じロボット セル内で 3 つの製造タスクすべてを実行する必要はありません。タスクを 1 つ実装するだけで、プロセスを改善できます。
3 つのタスクのうち、あなたのビジネスに最も役立つのはどれですか? (つまり、ロボット 3D プリント、ロボット機械加工、またはロボット表面仕上げ)。
自分にとって意味のあるものを選択し、上記のリンクを使用して詳細を確認してください。
オールインワンの製造セルで何を達成できますか? 以下のコメント欄でお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、または RoboDK フォーラムでのディスカッションにご参加ください。
産業用ロボット