


A.I.を使用すると、ロボットの外骨格が自己制御を獲得します
ロボット工学の研究者は、高度な人工知能(A.I.)テクノロジーを使用して、自分で一歩を踏み出す外骨格の脚を開発しています。自己制御型の脚は、いつか高齢者や身体障害者の動きをサポートする可能性があります。
ウォータールー大学の研究者によって構築およびテストされたこのシステムは、コンピュータービジョンとディープラーニングA.Iを組み合わせたものです。人間のような歩行を模倣します。サンプルのコレクションから「学習」します-環境の周りを散歩し、システムはそれが感知する周囲に基づいてその動きを調整します。
「私たちはロボットの外骨格にビジョンを与えて、彼らが自分自身を制御できるようにします」とBrokoslaw Laschowski 、ExoNet と呼ばれるウォータールー大学の研究プロジェクトを率いるシステムデザインエンジニアリングの博士課程の候補者 。
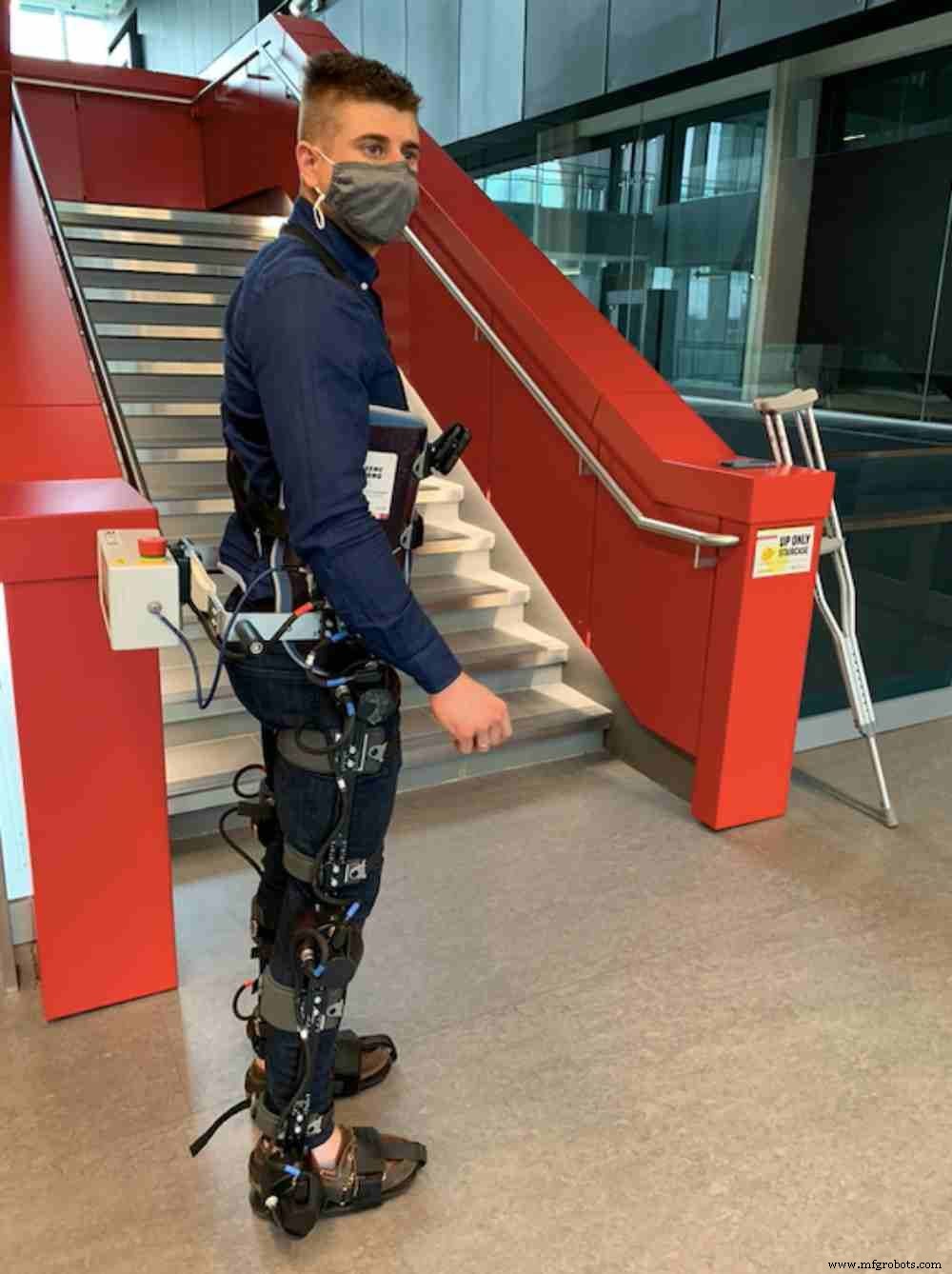
人工知能によってサポートされているExoNetシステムは、チームによって収集されたトレーニングデータから取得します。ウェアラブルカメラを胸に固定して(上の画像を参照)、Laschowskiと彼の仲間の研究者は屋内と屋外の環境のビデオを撮りました。
A.I.次に、コンピュータソフトウェアがビデオフィードを処理して、周囲の階段、ドア、その他の機能を正確に認識しました。
この成果は、ジャーナルFrontiers in Robotics and AI で詳しく説明されています。 。 (調査データセットを調べます この自律的な外骨格プロジェクトに関連しています。)
関連プロジェクトに関する一連の論文の最新版である、エネルギー再生を伴うロボット外骨格および義肢の立位生体力学のシミュレーション 、ジャーナルIEEE Transactions on Medical RoboticsandBionicsに掲載されています。
電動式の外骨格脚は以前に設計されていましたが、着用者はほとんどの場合、動きを制御するためにジョイスティックまたはスマートフォンアプリケーションを必要としていました。
技術概要に関するその他のロボット
テルアビブ大学で開発されているロボットは、自然のセンサー、つまり死んだイナゴの耳のおかげで、電気信号を「聞く」ことができます。
新しいロボットは、移動するために電子機器を必要とせず、加圧空気の一定の供給源だけを必要とします。
「それは不便で、認知的に厳しいものになる可能性があります」とLaschowskiは言いました。 「新しい自発運動を実行するたびに、停止してスマートフォンを取り出し、目的のモードを選択する必要があります。」
ウォータールー大学のアプローチは、A.I。のおかげでより自動化された制御を提供します。およびコンピュータビジョン機能。
ExoNet研究プロジェクトの次のフェーズでは、ロボットの外骨格が階段を上ったり、障害物を回避したり、ユーザーの現在の動きと今後の地形の分析に基づいてその他の適切なアクションを実行したりできるように、モーターに指示を送信します。
さらに、研究者たちは、人間の動きを利用してバッテリーを自己充電することにより、ロボットの外骨格用モーターのエネルギー効率の改善にも取り組んでいます。
「私たちの制御アプローチは、必ずしも人間の思考を必要としません」と、工学教授のジョンマクフィーによって監督されているLaschowskiは言いました。 、カナダのバイオメカトロニックシステムダイナミクス研究委員長、モーションリサーチグループ ラボ。 「自動運転車と同様に、私たちは自分で歩く自動運転車を設計しています。」
Tech Briefs とのQ&A 以下では、Brokoslaw LaschowskiがExoNetテクノロジーについて詳しく説明し、自動運転車と同様の機能を備えた外骨格に車両のような安全対策を含める必要がある理由について説明します。
技術概要 :どのようにして安全を確保しますか?外骨格が誤って危険なことをしている場合、ユーザーは制御できますか?例えは、ADASと完全自動運転車です。ユーザーはどのように速度と停止と移動を制御しますか?このようなコントロールはユーザーとどのように連携しますか?
Brokoslaw Laschowski :安全性が最も重要です。これらのロボット装置は、高齢者や身体障害者(脳卒中、脊髄損傷、脳性麻痺、変形性関節症など)を支援するように設計されています。外骨格が間違った決定を下し、転倒や怪我を引き起こす可能性があるわけではありません。そのため、外骨格が歩行環境をリアルタイムで自律的に感知して反応できるようにする環境認識システムを開発することにより、分類の精度と制御の向上に全力を注いでいます。臨床試験の前に、コンピューターと「正常な」コントロールを備えたウェアラブルプロトタイプを使用して、システムパフォーマンスを最適化しています。ただし、外骨格のユーザーは常に手動制御(停止やステアリングなど)を引き継ぐことができます。
技術概要 :この種の外骨格を想定しているアプリケーションを紹介してもらえますか?これはどこで最も価値がありますか?
Brokoslaw Laschowski :これらのロボット装置は、高齢者や身体障害者の運動活動を支援するように設計されています。私たちの環境適応型自動制御システムのアプリケーション例は、異なる運動活動の切り替えです。市販の外骨格では、たとえば、平地歩行から登山階段に移行する場合、ユーザーは階段に近づき、停止し、モバイルインターフェース、押しボタン、またはその他の手動制御を使用して、意図したアクティビティを外骨格に手動で伝達します。 (デバイスによって異なります)。
対照的に、自律制御システムでは、ユーザーが傾斜階段に近づくと、慣性測定装置(IMU)などの車載センサーがユーザーの現在の動きを継続的に検知して分類し、ウェアラブルカメラシステムが次の地形を検知して分類します。これらのさまざまなセンサーテクノロジーとパターン認識アルゴリズムの融合を使用して、ユーザーの運動意図を予測し、外骨格を制御します。
技術概要 :外骨格は人間の思考なしで動作するようにどのように「訓練」されていますか?
Brokoslaw Laschowski :環境分類にはコンピュータービジョンとディープラーニングを使用します。何百万もの実世界の画像を使用して、畳み込みニューラルネットワークは、画像に示されているさまざまな歩行環境を予測するように自動的かつ効率的にトレーニングされます。歩行環境に関するこの情報は、その後、最適な経路計画、障害物の回避、さまざまな運動活動の切り替え(たとえば、平地での歩行から階段を上るまで)の観点から、ロボットの外骨格を制御するために使用されます。
技術概要 :この外骨格の次は何ですか?今何に取り組んでいますか?
Brokoslaw Laschowski :セーフティクリティカルな観点から、これらのA.I.を利用した外骨格制御システムは、正確かつリアルタイムで実行する必要があります。そのため、オンボードのリアルタイム推論を促進するために、最小限の計算およびメモリストレージ要件を備えたニューラルネットワークアーキテクチャを使用しながら、環境分類の精度を向上させることに重点を置いています。
どう思いますか?質問やコメントを共有してください。
センサー