


ポリジメチルシロキサンクロスカップリング回折格子に基づく多自由度運動パラメータの測定方法
要約
この作品は、酸素プラズマ処理技術を使用してポリジメチルシロキサン(PDMS)基板の両面に準備されたクロスカップリング回折格子の使用に基づく多自由度運動パラメータ測定方法を提示します。クロスカップリング光学格子を通過するレーザービームは、2次元スポットアレイに回折されます。スポットアレイの変位とギャップサイズは、フラウンホーファー回折効果によって説明されるように、レーザー光源の動きの関数でした。 480×640ピクセルの電荷結合デバイス(CCD)を使用して、2次元スポットアレイの画像をリアルタイムで取得しました。次に、提案されたアルゴリズムを使用して、モーションパラメータを取得しました。この方法と上記のCCDを使用した場合、変位と偏向角の分解能はそれぞれ0.18μmと0.0075ラジアンでした。さらに、ピクセル数が多いCCDは、変位の解像度と偏向角をそれぞれサブナノメートルとマイクロラジアンのスケールに向上させることができます。最後に、ホバリングする回転翼航空機の動的位置は、提案された方法を使用して追跡およびチェックされました。これは、航空機の位置を修正し、空で航空機を安定させる方法を提供するために使用できます。
背景
マルチ自由度のモーションパラメータは、特定のターゲットに関する正確な位置と姿勢の情報を提供できます。これは、航空機の姿勢の安定性の制御、ガンプローブシステムの照準の安定性、ロボットアームなどのアプリケーションで、大型構造物に広く使用されています。産業用加工のための移動、精密部品の位置合わせ、およびワークピースの位置決め[1,2,3]。
そのため、ターゲットの自由度の高い情報(真直度、ピッチ、たわみ角など)を高精度で検出する手法を採用し、高速検出の特性を含めた高性能センサーが必要でした。 、同期、高い測定精度、そしてリアルタイム。これらの方法は、航空宇宙、無人航空機、精密製造、および光学アライメントアプリケーションで広く使用されていました[4、5、6]。
正確なリアルタイム測定と動的な多自由度の動き情報の分離の方法は、キャリア姿勢の安定性を決定するための重要な要素でした。 Hsieh [7]は、さまざまな自由度を検出するために3つのモジュールグループを使用する3次元検出アレイを提案しました。このアレイでは、さまざまな検出モジュールを使用してさまざまな位置情報を測定し、アルゴリズムを使用して角度とマルチを計算しました。自由度情報。 Liu [8]は、情報測定を実行するために、2つのアセンブリ格子間の相対角度の変化に基づく多自由度の運動パラメータ測定方法を提示しました。ただし、上記のアプローチは、組み立てられた2つ以上の検出要素によるエラーと結合計算の複雑さである傾向があり、その精度は高精度の機器システムにも依存します。
マイクロナノ製造技術、ナノテクノロジー、ナノ材料の開発に伴い、研究者は、小型化と低コストのアプリケーションの観点から、シングルチップ実装に基づく多自由度の運動パラメータ検出方法を研究してきました。ナノ材料、光学材料、およびナノデバイスの分野。 Tana [9]は、携帯型の小型プリズム構造に基づく非回折ビームを使用した多自由度の移動パラメータ検出アルゴリズムを報告しました。これにより、測定誤差を最小限に抑えることができます。私たちのチームは、多軸統合機械センサーを使用した表面ベクトルひずみ測定に適用できる単一の検出要素に基づくベクトルひずみゲージ法を提示し、この論文の研究の基礎を提供しました[8、10]。
>この作業では、単一の要素に基づいて、複数の自由度のベクトル変位と角度の測定方法が示されました。この要素は、酸素プラズマ処理技術を使用して製造され、楕円形に事前に曲げられたポリジメチルシロキサン(PDMS)基板の両側に直交勾配光学格子構造を形成しました。これらの交差した光学格子により、入力レーザービームが2次元スポットアレイに回折される可能性があります。回折スポットの位置情報を使用して、位置アルゴリズムによってリアルタイムで計算された入射ビーム角度を実現できます。この方法と480×640ピクセルの電荷結合デバイス(CCD)に基づくと、変位と偏向角の測定分解能は、それぞれ0.18μmと0.0075ラジアンでした。さらに、より高いピクセルのCCDは、変位と偏向角の測定分解能をそれぞれサブナノメートルレベルとマイクロラジアンレベルに向上させることができます。最後に、ホバリングする回転翼航空機の動的位置は、提案された方法を使用してリアルタイムで追跡されています。取得した情報は、航空機の位置を修正するために使用でき、空での航空機の安定化のための新しい方法を証明します。
実験的
ポリジメチルシロキサン(PDMS)の準備
PDMS(Sylgard 184)はDowCorningから購入しました。 PDMS(10:1)メンブレンは、シリコンウェーハ上にスピンコーティングすることで作成され、80°C未満の温度で2時間回転させた直後に硬化しました。回転速度を制御することにより、厚さ600μmのPDMS基板を作成しました。
二重直交格子の準備
実験要件に従って、PDMSフィルムは3×3 cm 2 の面積で準備されました。 。次に、PDMSフィルムは、自家製の平行移動ステージを使用して、元のフィルムに対してX方向に1.5倍事前に歪められました。しわのあるSiO x 次に、O 2 上に層が形成されました。 30 sccmの酸素流量と40秒の酸化時間の条件下で、プラズマ処理された事前に歪んだPDMS基板(IoN Wave 10、PVA-TePla、ドイツ)。事前に歪ませた後、PDMS基板の表面に均一で整然としたナノグレーティング構造が形成されました。図1aに示すように、このプロセスをPDMS基板の反対側で90°の角度差で繰り返し、PDMS基板の両側に直交格子構造を形成しました。
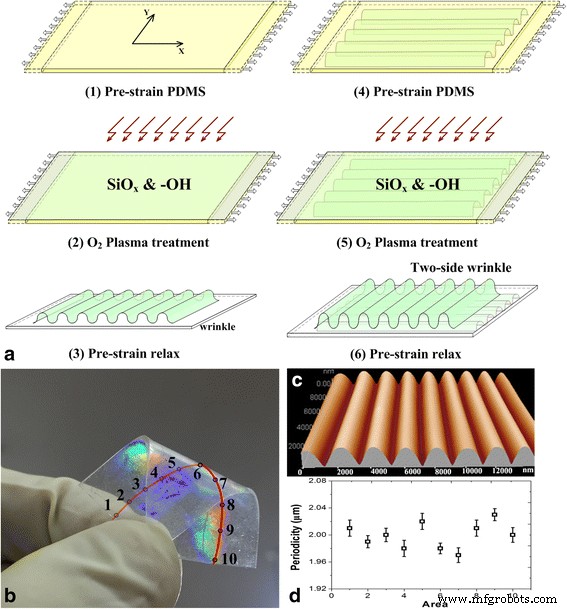
PDMS二重光学格子の製造プロセスと形態の特性評価。 a 二重光学格子の製造。 b グレーティングの光学画像。 c グレーティングの原子間力顕微鏡画像。 d サンプルの周期性の均一性
テストプラットフォームの構築
4自由度変位角度センサーシステムは、レーザー光源、角度および変位プラットフォームアセンブリ、試料ホルダー、スクリーン、CCDカメラ、およびコンピューターを含むように構築されています。図2aに示すように、He-Neレーザー光源(レーザー波長680 nm)は、電気回転プラットフォームと手動の3次元調整フレーム(Beijing Zolix Instrument Co.、Ltd)で構成される角度および変位プラットフォームアセンブリに取り付けられました。 。)。プラットフォームの回転精度は0.1°、変位精度は2μmです。この交差した光学格子により、レーザービームが2次元スポットアレイに回折される可能性があります。 480×640ピクセルの相補型金属酸化膜半導体(CMOS)カメラを使用して、MATLAB画像処理アルゴリズムを使用して2次元スポットアレイの画像をリアルタイムで取得しました。このアルゴリズムを使用して、各回折点の位置を抽出し、計算しました。 x- および y -軸の変位と角度情報。 4回転翼航空機(Typhoon Q500、Yuneec Electric Aviation)の形式のテストプラットフォームが提供されました。そして、屋内ホバリング姿勢を得るために、4自由度の情報が取得されました。
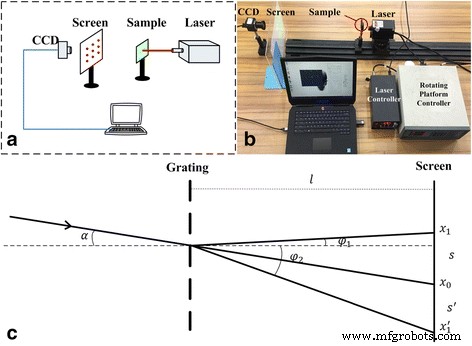
MODFモーションパラメータの原理とテストシステム。 a システム図。 b システム設定。 c 変位と角度のテスト原理
分析とディスカッション
直交PDMS格子特性評価
製造プロセスは図1aのように示されています。 PDMSの親水性表面改質は、酸素プラズマ技術を使用しました。 SiO x したがって、層および親水性基(例えば、-OH)は、酸素プラズマによって、事前に曲げられたPDMS基板上に形成された。 PDMS基板の予ひずみが臨界値を超えると、予ひずみ緩和後にPDMSの表面に格子構造が形成されました[11、12]。グレーティングの周期性は、適用されたプリベンドとプラズマ条件を調整することによって達成され、以前の作業で計算できます。図1cに示すように、マイクロ/ナノグレーティングのトポグラフィは、原子間力顕微鏡(AFM)(CSPM5500; Benyuan Co.)によって特徴づけられました。図1b、dに示すように、格子構造の周期性と均一性を調べるために、サンプルの片側の中心線に沿って10個の領域が選択されています。 10領域の格子の対応する周期性は均一であり、サンプル表面全体で(2±0.05)μmの周期を持っていました。
位置と角度のモーションパラメータの特性評価のための回折格子
フラウンホーファー回折理論[13]によると、レーザービームはサンプルを通過して(グレーティングとともに)光スポットマトリックスに回折します。回折スポットの位置は、入射ビームの位置と角度に直接関係しているため、回折スポットの位置情報から入射ビームの位置情報を検出することができます。
図2は、入射ビームの位置決めと対応する回折スポットを追跡するための移動および回転するプラットフォームを示しています。フラウンホーファー回折理論によれば、回折格子とスクリーン距離が固定されている場合、入射ビーム、回折ビーム、および波長の関係は次のように表すことができます。
$$ d \ left(\ sin \ varphi \ pm \ sin \ alpha \ right)=m \ lambda \ left(m =0,1,2、\ dots \ right)$$(1)ここで、λ は入射ビームの波長でした d 格子の周期でした、α は入射角φでした は回折角であり、 m 回折格子の回折次数でした。
入射角αの場合 が0に等しくなかった場合、「+」は回折ビームと入射ビームがグレーティング法線の同じ側に分布していることを示し、「–」は回折ビームと入射ビームが法線の両側に存在することを示します。特定の入射角では、1次の回折点と0次の回折点の間の距離は画面上で等しくありませんでした。したがって、ポイント間の距離は、入射角によって変化する可能性があります。入射ビームの角度は、回折光のスポット位置を計算することで定量的に計算できます。同時に、入射ビームの可動位置により、回折点のゼロ次の移動が発生します。入射ビーム位置情報は、回折ビーム点のゼロ次の位置情報から計算できます。
図2cは、格子回折図の一方向を示しています。ここで、 x 0 は回折スポットの1次であり、 x 1 および\({x} _1 ^ {\ hbox {'}} \)は、回折スポットの2次を示します。図2cから、 s および s ’は、次のように表される1次と2次の回折スポット間の距離です。
$$ s =l \ tan \ alpha + l \ tan {\ varphi} _1 $$(2)$$ {s} ^ {\ hbox {'}} =l \ tan \ alpha -l \ tan {\ varphi} _2 $$(3)式から(1):
$$ d \ left(\ sin {\ varphi} _1 + \ sin \ alpha \ right)=\ lambda $$(4)$$ d \ left(\ sin {\ varphi} _2- \ sin \ alpha \ right)=\ lambda $$(5)上記から、ビーム入射角と回折スペックル間隔の相関モデルは次のように取得できます。
$$ s =l \ tan \ alpha + \ tan \ left(\ arcsin \ left(\ frac {\ lambda} {d}-\ sin \ alpha \ right)\ right)$$(6)$$ {s} ^ {\ hbox {'}} =l \ tan \ alpha- \ tan \ left(\ arcsin \ left(\ frac {\ lambda} {d} + \ sin \ alpha \ right)\ right)$$(7)直交回折格子ベースの複数自由度のモーションパラメータの検出と特性評価
一方向の光学格子を通過するレーザービームは、単一の回折スポットを形成する可能性があります。直交配向は、レーザービームがPDMS基板の両側にある直交格子を通過するときに形成できます。画面の片側の回折格子の方向に沿って光ビームを透過し、寸法を x に設定すると、1次元の回折格子回折ビームが形成されます。 -軸。次に、一次元格子回折ビームが x に直交して形成された。 -光線が画面の反対側の格子の方向に沿って通過し、寸法が y に設定されたときの軸 -軸。図3bに示すように、2次元の回折点アレイが画面上に形成されました。
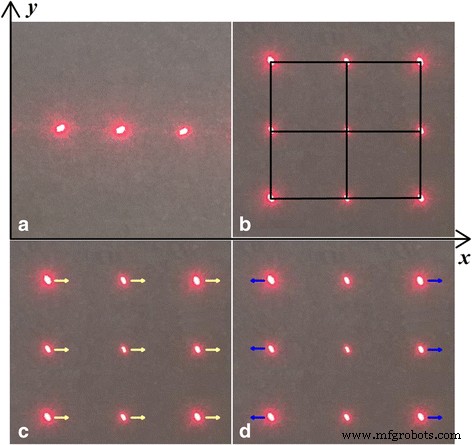
MODFモーションパラメータは、回折スポットの移動に依存します。 a 一次元回折スポットは一方向回折格子によって生成されました。 b 二次元スポットアレイは、ダブルクロス光学格子によって生成されました。 c スポットアレイの移動は、レーザー光源の移動によって制御されました。 d スポットアレイ間を移動するギャップは、レーザービームの入射角として制御されました
レーザービームの位置を変更すると、回折光スポットの位置のゼロ次が対応する動きを示し、フラウンホーファー回折理論に基づいて回折ビットマップの位置がそれに応じて変化します。入射ビームの位置は、格子の移動方向に基づいて直接計算でき、 x-に沿った光ビームの実現位置情報を検出できます。 および y -軸。図3cに示すように、回折点位置の1次は、変位とたわみの結合効果のために、光の変位を正確に計算できません。さらに、回折点の位置のゼロ次は、光源の位置にのみ関連していました。したがって、光源の位置を計算するために、回折点変位のゼロ次を使用する方がより正確です。図3dに示すように、 x に沿った入射光ビームの偏向角情報 -軸と y -軸は、 x 上の光点間の距離で計算できます。 -軸と y -角度とスポットの変化の間の関連モデルに基づく軸。
しかしながら、回折スポットの変位の理由への制限は、式(1)に基づく入射角および格子とスクリーンとの間の距離に依存する。 (1)。私たちの作品では、格子はスクリーンで固定されていました。つまり、格子とスクリーンの間の距離の変動はゼロでした。レーザー光源が z に沿って移動しているとき、回折スポットは変位しませんでした -軸。同様に、レーザー光源が z に沿って回転しているとき -軸では、入射角の変動はゼロでした。これにより、回折スポットが変位しなくなります。
私たちの実験では、角度の変化(Δθ x ) x に沿って -軸は列間隔( s )で計算できます x 、\({s} _x ^ {\ hbox {'}} \))回折スポット、および角度変化(∆ θ y ) y に沿って -軸は列間隔( s )に基づいて計算できます y 、\({s} _y ^ {\ prime} \))回折スポットの。ポートフォリオプラットフォームを調整して光源の位置を変更し、MATLABソフトウェアによって0.02秒ごとにカメラ画像を取得して、以前の値と比較するために回折スポットの位置を抽出しました。これを使用して、
アルゴリズムに基づいて、移動前後の画像を処理して∆ x を計算することにより、スポットアレイの変位を分析できます。 、∆ y 、∆ θ x 、および∆ θ y 。レーザースポットは画像に複数のピクセルを含み、そのエネルギーはガウス分布に従っているため、ガウス分布フィッティング法を使用して画像からバックグラウンドノイズを除去し、レーザースポットの中心位置を正確に抽出しました。レーザースポットのガウス関数は次のように表されます。
$$ I \ left(x、y \ right)=H \ cdot \ exp \ left \ {-\ left [\ frac {{\ left(x \ hbox {-} xo \ right)} ^ 2} {\ sigma_1 ^ 2} + \ frac {{\ left(y \ hbox {-} yo \ right)} ^ 2} {\ sigma_2 ^ 2} \ right] \ right \} $$(8)ここで、私 ( x 、 y )はスポット強度であり、 H 振幅でした、( x 0 、 y 0 )は光点の中心座標であり、σ 1 、σ 2 x の標準偏差でした -軸と y -それぞれ。
上記の式の両側に対数を適用して、スポットの中心位置を取得できます。これは、次のように表すことができます。
$$ {x} _0 =-\ frac {c} {2a} $$(9)$$ {y} _0 =-\ frac {d} {2b} $$(10)ここで、 a 、 b 、 c 、および d スポット内のすべてのピクセルのガウスフィッティングによって得られた多項式係数でした。
2つの回折スポット間の距離の変化は、移動前後の2つの画像によって計算されています。そして、回折スポットの中心スポットは、移動前の座標中心のシステムとして設定されています。つまり、光スポットの絶対変位と相対変位の座標系です。回折光スポットの絶対変位座標系は、静止スクリーンを基準として使用しました。動きの情報(Δx 、Δy )両方のスクリーンの格子の)は、回折点座標のゼロ次(つまり、中心位置)によって計算できます。光スポットの相対変位座標系は、ゼロ次の回折スポットを基準としており、スポットアレイ間隔( S )の変化を計算するために使用できます。 x )と行間隔( S y 。
図4は、4つの自由度の特性を示しています。レーザービームが x に沿って刈っていたとき -軸、 x に対応する回折格子の動きがありました -軸ですが、 y の変位はほぼゼロでした -軸。変位の感度は約5.4ピクセル/μmでした。この方法を使用すると、図4aに示すように、軸に沿った光源の位置情報を高精度で計算できます。
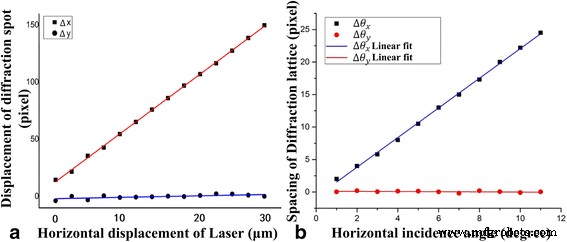
4つの自由度の特性。 a レーザー光源の変位は、回折スポットの変位に依存します。 b レーザー光源の入射角は、回折スポット間のギャップに依存します
レーザーが x に沿って小さな角度で回転したとき -軸では、回折スポットアレイの行間隔に対応する距離の変化があり、スポットアレイの列間隔はゼロでした。変位の感度は、角度あたり約2.3ピクセル(/°)でした。一方、角度の測定範囲は、式(1)で計算すると理論上約9.8°でした。 (1)–(5)距離 s =0.入射角が大きくなると、回折スポットの1次に起因するのは、回折スポットの0次と一致し、回折スポットの距離変化はゼロになります( s =0)。この方法は、 x に沿った光源の角度情報を取得するために使用できます。 -軸。この方法を使用して、位置と角度の情報を取得することもできます。
1ピクセルの検出解像度は、MATLABソフトウェアに基づくアルゴリズムによって異なります。上で計算したように、このメソッドの変位感度は5.4ピクセル/μmです。これは、解像度が0.18μmであることを意味します。 2.3ピクセル /°の変位感度の場合 、0.0075radの解像度でした。これは、ここに示した方法とCCDの解像度に基づいて、変位と角度の解像度がそれぞれ0.18μmと0.0075ラジアンであることを示しています。 480×640ピクセルのCCDを使用して、2次元スポットアレイの画像をリアルタイムで取得しました。さらに、より高いピクセルのCCDと光路の最適化により、変位の解像度と偏向角がそれぞれサブナノメートルとマイクロラジアンのスケールまで向上する可能性があります。
ホバリング航空機の回転翼機のモーションパラメータ情報の特性評価
回転翼航空機は、低精度の民間無人航空機システムの一種であり、航空、模型飛行機、およびナビゲーションの分野で広く使用されていました。回転翼航空機の安定性制御は、無人戦闘プラットフォームの縮図を表しています。高精度の飛行制御を実現するために最も重要なことは、航空機の姿勢と位置を安定して制御することでした。そして、中心的な側面は、高精度のホバリング姿勢と位置情報をリアルタイムでデコードすることでした。これにより、ホバリングに関する正確な4自由度のモーションパラメータ情報が不可欠な資産になります。
私たちの実験では、交差結合回折格子に基づいて、航空機の飛行の4自由度の姿勢情報をリアルタイムで達成するための測定方法が提示されました。まず、4回転翼航空機を使用してプラットフォームを交換しました。プラットフォームは、4自由度を設定するための二重格子に基づく4自由度テストシステムの位置と姿勢で構成されていました。 -4回転翼航空機の自由度試験システム。テストシステムでは、光源として4回転翼航空機の中央に小さなレーザーポインターを固定し、レーザービームを垂直下向きに照射しました。二重格子、スクリーン、およびカメラを備えたサンプルは、光軸の中心に沿って回転します。この交差した光学格子により、レーザービームが2次元スポットアレイに回折される可能性があります。実験では、カメラを使用して画面から画像を取得し、画像をリアルタイムでコンピューターに送信して、MATLABソフトウェアによって変位情報を計算しました。
飛行信号の迅速で正確なリアルタイム測定を実現するために、4回転翼航空機は空中に浮かんでおり、4秒間維持された姿勢信号を高速で追跡していました。 x に沿った軸方向変位に関する情報 -軸と y -図5cに示すように、4回転翼航空機の軸は4秒の時間で取得されています。平面座標系(つまり、 x )の確立に基づいて -軸と y -axis)、 x および y 値はこれらの座標点に変換されます。 200のポジショニングの結果は4秒で、0.02秒で1ポイントを獲得したことを意味します。これは、航空機の位置と位置を決定するために、リアルタイムで0.02秒ごとに航空機の追跡方法を使用することを表しています。航空機の最大変位は、 x で2.1mmです。 - y での軸と最大変位2.3mm -アルゴリズムによると、軸。
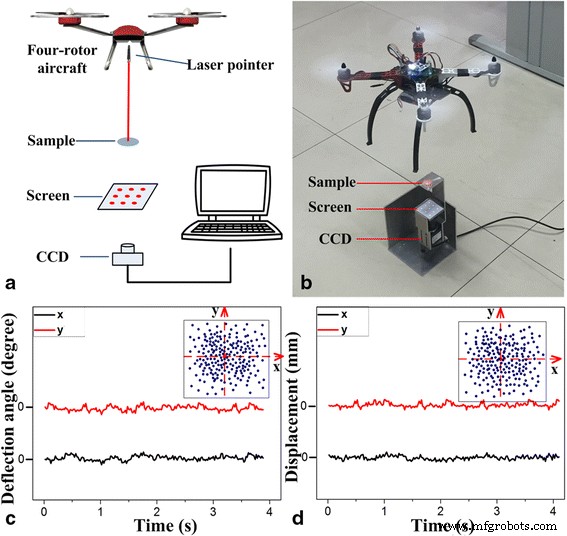
4回転翼航空機の姿勢の特性。 a システム図。 b システムのセットアップ。 c 回転翼航空機のたわみ角。 d 回転翼航空機の変位
さらに、航空機のピッチ角とロール角の情報は、上記のアルゴリズムとデータ処理方法によって計算されています。図5dの挿入図に示すように、4回転翼航空機の回転角ドット図は、0.02秒ごとにリアルタイムで追跡することにより、航空機の正確な角度情報を提供しました。航空機の x での最大角度偏差は1°であることが観察されました。 -軸と y- 軸。したがって、この方法では、航空機の4自由度の情報を計算できます。これにより、正確な位置と角度の信号を0.02秒以内に飛行制御システムにフィードバックして、航空機の安定性を向上させることができます。
結論
要約すると、PDMS基板の両側に2μmの周期性を持つ直交光学格子構造を製造するための簡単な製造可能な技術が実証されました。直交光学格子構造に基づいて、フラウンホーファー回折効果に基づく回折光スポット位置情報を使用して、ビーム位置および角運動パラメータ情報を識別する方法が研究されてきた。 480×640ピクセルのCCDを使用して、2次元スポットアレイの画像をリアルタイムで取得しました。この結果は、この方法と上記のCCDを使用した場合、変位と偏向角の分解能がそれぞれ0.18μmと0.0075ラジアンであることを示しています。さらに、より高いピクセルCCDを使用すると、変位と偏向角の解像度をそれぞれサブナノメートルとマイクロラジアンのスケールまで向上させることができます。この方法を使用すると、回転翼航空機の正確なホバー位置と角度情報を0.02秒ごとに高精度でリアルタイムに検出できます。この情報は、空中の無人航空機の飛行システムを制御するために還元することができます。この方法は、シンプル、低コスト、高精度であり、無人戦闘プラットフォーム用の航空機の安定した飛行と正確な制御のための研究基盤を提供しながら、リアルタイムの監視を実現できます。
ナノマテリアル