


ゲストブログ— Markforgedでギアアップ(およびダウン)するCharles Guan
このゲストブログは、MITの機械工学の卒業生で元MITの機械工場および設計インストラクターであるCharlesGuanによって書かれています。彼はまた、ABCのバトルボットでロボットオーバーホールの製作者でもあり、この夏の木曜日の午後8時東部7時中央部で放映されます。彼はロボット工学と輸送のエンジニアリングコンサルタントとして働いており、バトルボットで競争するためにMarkforgedによって後援されています。彼のウェブサイトとEqualsZeroRoboticsをチェックしてください。
戦闘ロボットの背景

ロボットファイティングの世界では、ウェッジ、フリッパー、ハンマー、スピニングローターなど、常に見がちな基本的なデザインがいくつかあります。伝説のポケモンのように、いくつかのデザインは「聖杯」であり、めったに見られず、アリーナでうまく実行されることはめったにありません。 「フライホイールフリッパー」もそのひとつです。通常、高速フリッピングアームは、敵を数フィート空中に投げるのが見られるもので、空気圧式です。しかし、空気圧は電力密度が高いものの、エネルギー密度が高くなく、最高の足ひれでさえ、文字通りガスがなくなる前に、1ダース未満の良いショットを得ることができます。電動フライホイールフリッパーは、バッテリーの高エネルギー密度とフライホイールの運動エネルギーの高電力可用性を兼ね備えています。
このエネルギーを迅速に解放可能でありながら制御可能な形に導くことは、とらえどころのないものでした。設計上の課題には、信頼性の高いエンゲージメントメカニズム、一貫したタイミング、段階的な加速、およびビジネスエンドへの堅牢なリンクが含まれます。これらのいずれかを台無しにすると、運動エネルギー手榴弾を作成した方がよいでしょう。
ロボットの戦闘の歴史の中で、ほんの数例しか作成されていません。スモールエンドには、ボットMagneatoを含むZac O’Donnellの3〜30ポンドクラスのロボットのシリーズと、DaleHeatheringtonの比較的成功した設計があります。ビッグボットにとって、ウォリアーはベンチマークでした。

お気づきの方もいらっしゃると思いますが、これらのボットはそれぞれ異なる設計アプローチと最終的なメカニズムを使用しています。これは、デザインがコミュニティで行った調査のレベルを示しています。ロボットの設計は、建設業者が局所的に最適な解決策を見つけるにつれて同様に成長する傾向があるため、最後までいくつかの手段を備えた武器の設計は、まだ手つかずの状態です。
数年前から、「先のとがったフライホイール」(回転するドラムまたは歯のあるディスク)とインラインで取り付け、反対側のメカニズムに接続できる、この問題に対するコンパクトな同軸ソリューションを探していました。ロボット。これにより、多くの戦略的可能性を備えたデュアルウェポンロボットが実現します。そこで、バトルボットのトーナメントの合間にオフシーズンを取り、小さな3ポンドのロボットでこのアイデアをさらに追求し、デザインスキルを鋭く保ち、コミュニティのための別のソリューションを打ち破るのを手伝うと思いました。なぜ3ポンドクラスのロボットなのか? Mark Twoを使って印刷できる簡単なサイズだからです!

3Dプリントギアメカニズムの設計
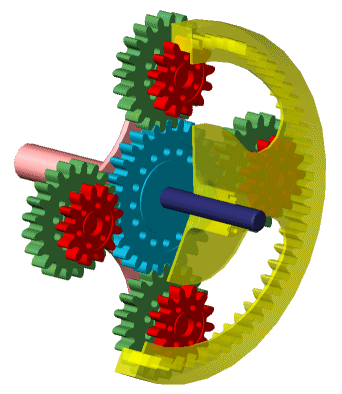
要件には、非常に高いギア比(20以上対1のオーダー)を同軸ボリュームに詰め込み、必要な場合にのみそのギア減速を実行する方法を見つけることが含まれます。複合遊星歯車機構として知られる遊星歯車システムを調査し、由緒ある「メカニズムと機械装置のソースブック」を含むいくつかの参考書を作成し、インターネットで設計ホワイトペーパーを精査しました。つまり、サイズがわずかに異なる2つのリングギアの相対速度を利用することで、単純な遊星ギアボックスと同じボリュームで非常に高いギア比を作成できます。
カスタムのスライディングドッグクラッチとフリクションバンドを短期間設計した後、私は自分のオートマチックトランスミッションを設計しているだけだと気づきました。複雑なものは通常戦闘で長生きしないので、このギア減速システムを使用する別の方法を考えなければなりませんでした。解決策は、ギアセットをトルク分割装置として使用することにありました。あなたはこれをトヨタの「ハイブリッドシナジードライブ」として、または他の商標の無段変速機の名前で知っているかもしれません。この発見は、歴史上多くの場合、偶然に起こりました。CADモデルを回転させていたところ、一方のリングギアを固定すると、もう一方のリングギアがまだ回転することがわかりました。その逆も同様です。 「相対速度」とは、それらの速度の1つがゼロになる可能性があることを意味することを忘れていました。
興奮して、おもちゃのリングギアと遊星ギアのセットをすばやくモデル化し、MarkTwoにOnyxを使用して印刷しました。オニキスは私が信頼した唯一の素材であり、十分に丈夫で剛性があります。ロボットのサイズが小さいため、使用できる歯車の歯のサイズに制限がありました。通常のナイロンの歯は柔軟性が高すぎたでしょう。そのため、小さな寸法変更が必要になった場合に備えて、おもちゃのモデルを最終製品の公差ゲージとしても使用したいと思いました。モデルは、ブレーキ、クラッチ、または自転車のホイールスポークを介したスティックの単純な方法で、いずれかの方法を使用して1つのギアを突然停止する必要があり、もう1つのリングが強制的に回転するという仮説を確認しました。

ロボット戦闘に備えて
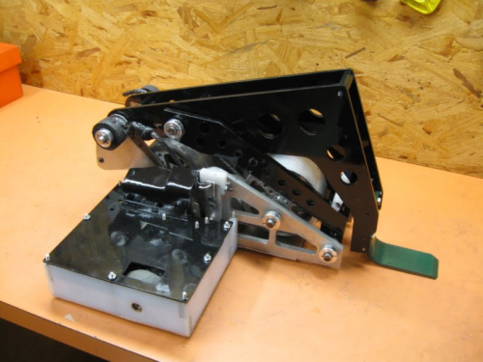
その後、ロボットの作業が本格的に始まりました。昔からアイデアのスケッチをいくつか引き出して、コンセプトを理解するために「ファーストパス」CADモデルを選び、そこから個々の設計ニーズに取り組むことにしました。長い話を短くするために、これが現在のデザインの写真です!
では、ここで何が起こっているのでしょうか。それは反転可能な三角形の本体を持っています-話す「逆さま」はありません。左側の丸い銀色のオブジェクトは、「歯」としてソケットヘッドボルトを備えた8オンスのアルミニウムローターです。これは、回転する武器のこの小さな重量クラスで一般的な戦術です。遊星機構は黒(オニキス用)でモデル化されており、サーボモーターがコマンドでノッチ付きリングギアにスライド歯を押し込み、回転を停止させ、他のリングギアを始動させます。このリングギアには、カムが回転するときに上部と下部の金属ウィングを強制的に離す「バタフライリンケージ」へのコネクティングロッドを備えたオフセットカムローブがあります。金属製の翼は共通のポイントでヒンジで固定されているため、一方は地面に対して反応し、もう一方はその時点でその上にあるものを上向きに持ち上げます。
この設計を完了する前に解決する必要のある詳細と幾何学的な問題がありますが、私は今、その概念に自信を持っています。欠点があります。たとえば、スライドする歯が動かなくなった場合、メカニズムは常にオンになり、ボットは機動性を失う可能性があります。翼に重さをかけずに乾式で火を放つと、おそらく屋根に届きます。しかし、デザインの欠点が目立つようになるのを見るのはスポーツの楽しみの一部なので、このボットで何が起こるかを楽しみにしています!
システムのデモは次のとおりです。
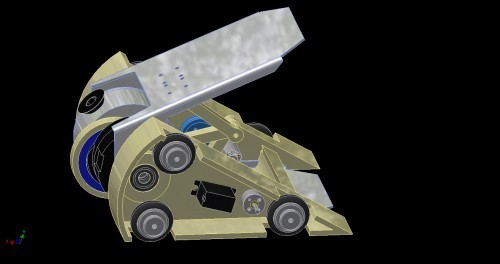
そして、ここにデザインの写真がいくつかあります:


写真提供:Charles Guan
3Dプリント
- 専門家へのインタビュー:MarkforgedのIbraheem Khadar
- ジグとフィクスチャ:3Dプリントで生産効率を向上させる6つの方法
- ArduinoとRaspberryPiを使用してインターネット制御のビデオストリーミングロボットを構築する
- メンテナンスでダウン。信頼性を高めます。
- FormlabsとFusion360でより迅速に設計および製造
- StratasysはGrabCADおよびe-Xstreamと提携しています
- SOLIDWORKSとMakerBotを使用したカオスの修正
- フェイスファースト:MarkforgedによるKevlar®ノーズプロテクション
- ロボット戦闘でMarkforgedが支配
- Markforgedで荒れた海をナビゲートする
- ピック アンド プレース – EasyWork でのロボット使用の完璧な例