


同期カウンター
同期とは カウンター?
同期カウンター 、非同期カウンターとは対照的 は、出力ビットがリップルなしで同時に状態を変化させるものです。
J-Kフリップフロップからこのようなカウンタ回路を構築する唯一の方法は、すべてのクロック入力を接続して、すべてのフリップフロップがまったく同じクロックパルスをまったく同時に受信するようにすることです。
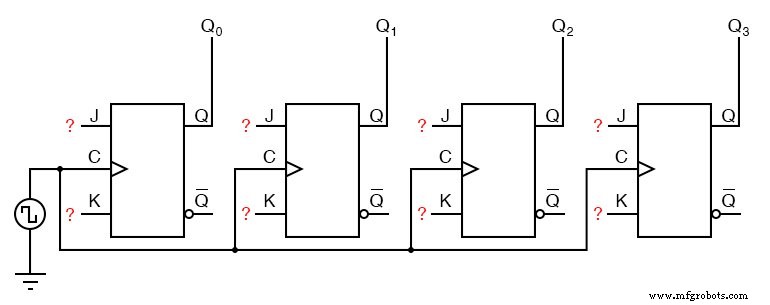
さて、問題は、JとKの入力をどうするかということです。バイナリシーケンスでカウントするには、同じ2分周周波数パターンを維持する必要があります。このパターンは、フリップフロップの「トグル」モードを使用して最もよく達成されるため、 JとKの入力は両方とも(時々)「高い」必要があります。
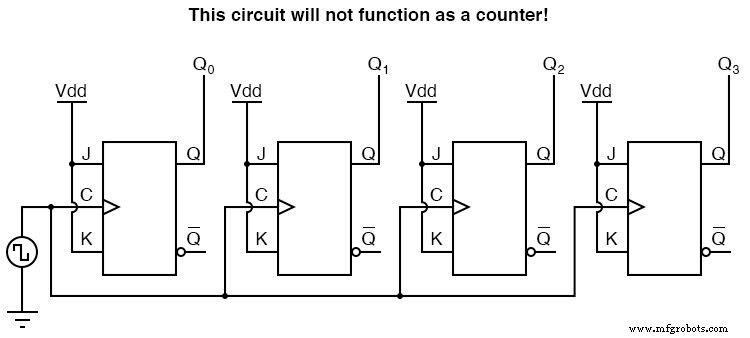
ただし、非同期回路で行ったように、すべてのJ入力とK入力を電源の正のレールに接続するだけでは、すべてのフリップフロップが同時にトグルするため、これは明らかに機能しません。クロックパルス!
4ビットのバイナリカウントシーケンスをもう一度調べて、ビットの切り替えを予測する他のパターンがあるかどうかを確認しましょう。
非同期カウンタ回路の設計は、各ビットのトグルが、前のビットが「ハイ」から「ロー」(1から0)にトグルすると同時に発生するという事実に基づいています。
同期カウンタ回路の前のビットのトグルに基づいてビットのトグルをクロックすることはできないため(そうするとリップル効果が発生します)、ビットをトリガーするために使用できる他のパターンをカウントシーケンスで見つける必要がありますトグル:
4ビットのバイナリカウントシーケンスを調べると、別の予測パターンが見られます。
ビットが切り替わる直前に、先行するすべてのビットが「ハイ」であることに注意してください。
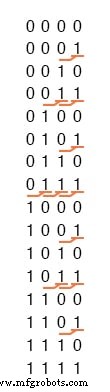
このパターンは、カウンタ回路を設計する際に利用できるものでもあります。
同期 「アップ」カウンター
先行するすべてのフリップフロップ出力(Q)が「ハイ」であるかどうかに基づいて、各JKフリップフロップをトグルできるようにすると、各フリップフロップがリップル効果なしで非同期回路と同じカウントシーケンスを取得できます。この回路では、まったく同時にクロックが供給されます:
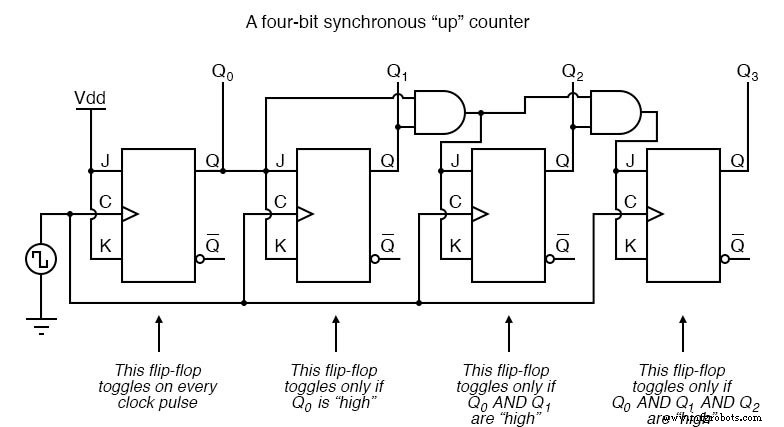
結果は4ビットの同期です。 「アップ」カウンター。以前のすべてのフリップフロップのQ出力が「ハイ」の場合、各高次フリップフロップはトグルできるようになります(J入力とK入力の両方が「ハイ」)。
そうしないと、そのフリップフロップのJ入力とK入力が両方とも「ロー」になり、次のクロックパルスで現在の出力状態を維持する「ラッチ」モードになります。
最初の(LSB)フリップフロップはクロックパルスごとにトグルする必要があるため、そのJおよびK入力はV cc に接続されます。 またはV dd 、常に「高い」状態になります。
次のフリップフロップは、最初のフリップフロップのQ出力がハイであることを「認識する」だけで、トグルできるようになります。したがって、ANDゲートは必要ありません。
ただし、残りのフリップフロップは、すべての場合にのみトグルできるようにする必要があります。 下位出力ビットは「ハイ」であるため、ANDゲートが必要です。
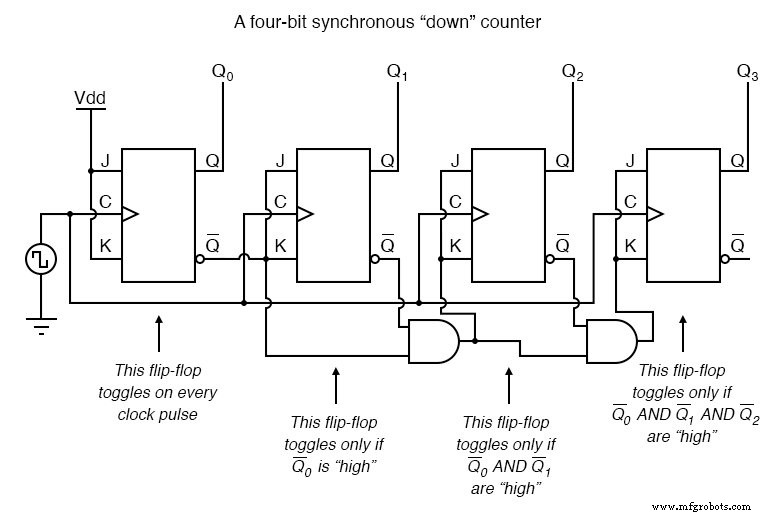
同期「ダウン」カウンター
同期「ダウン」カウンターを作成するには、カウントダウン中に各トグル状態を予測する適切なビットパターンを認識する回路を構築する必要があります。
当然のことながら、4ビットのバイナリカウントシーケンスを調べると、トグルの前に先行するすべてのビットが「ロー」であることがわかります(シーケンスを下から上にたどる):

各JKフリップフロップにはQ '出力とQ出力が装備されているため、Q'出力を使用して、後続の各フリップフロップでトグルモードを有効にできます。つまり、各Q 'は毎回「ハイ」になります。それぞれのQが「低い」時間:
選択可能な「アップ」および「ダウン」カウントモードを備えたカウンタ回路
このアイデアをさらに一歩進めて、「アップ」および「ダウン」カウントシーケンスの適切なビット条件を検出するANDゲートのデュアルラインを使用することにより、「アップ」および「ダウン」カウントモードから選択可能なカウンタ回路を構築できます。次に、それぞれORゲートを使用して、ANDゲート出力を後続の各フリップフロップのJおよびK入力に結合します。
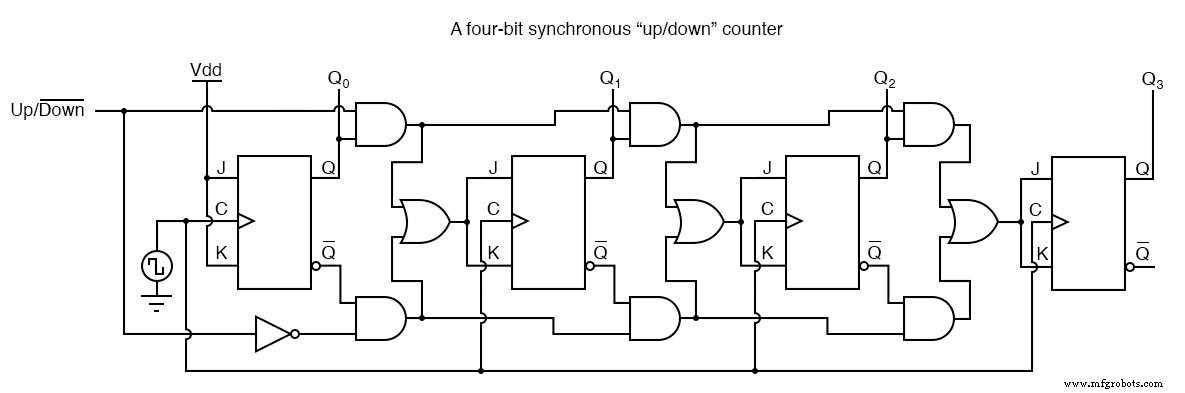
この回路は、最初に表示されるほど複雑ではありません。アップ/ダウン制御入力ラインは、ANDゲートの上位ストリングまたは下位ストリングのいずれかがQ / Qの出力をフリップフロップの後続のステージに渡すことを可能にするだけです。
アップ/ダウン制御ラインが「ハイ」の場合、トップANDゲートが有効になり、回路はこのセクションに示す最初の(「アップ」)同期カウンタ回路とまったく同じように機能します。
アップ/ダウン制御ラインを「ロー」にすると、下部のANDゲートが有効になり、回路はこのセクションに示す2番目の(「ダウン」カウンター)回路と同じように機能します。
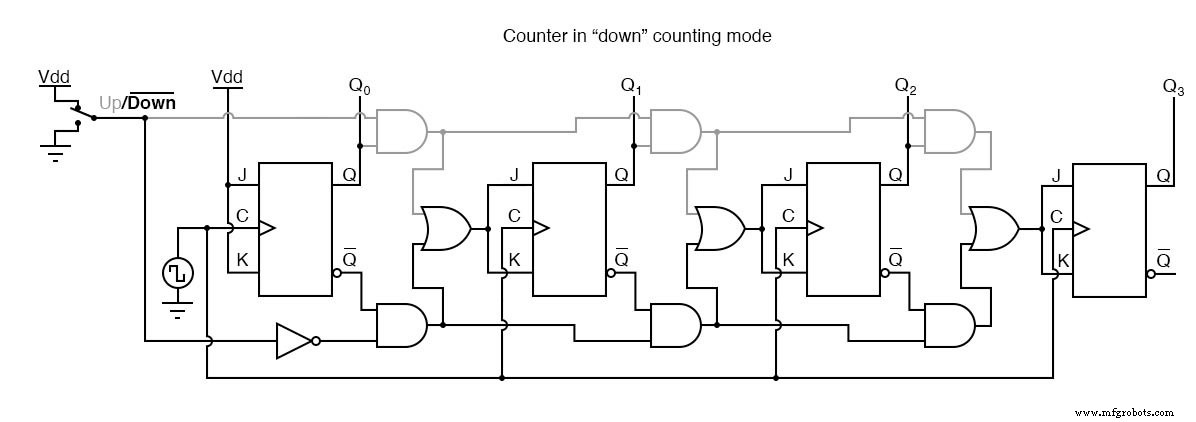
説明のために、これは「アップ」カウントモードの回路を示す図です(すべての無効な回路は黒ではなく灰色で表示されます):

ここでは、「ダウン」カウントモードで示され、同じ灰色が無効な回路を表しています。
アップ/ダウンカウンタ回路は非常に便利なデバイスです。一般的なアプリケーションは、機械のモーションコントロールで、ロータリーシャフトエンコーダと呼ばれるデバイスがあります。 機械的回転を一連の電気パルスに変換します。これらのパルスは、カウンター回路を「クロッキング」して、全体の動きを追跡します。
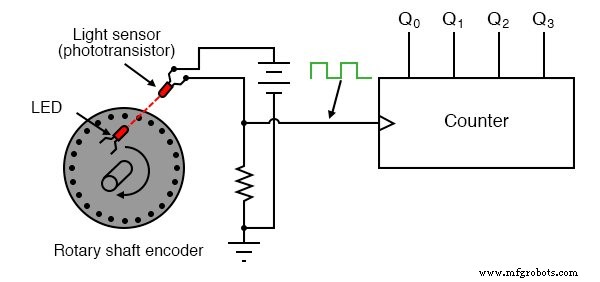
機械が動くと、エンコーダーシャフトが回転し、LEDとフォトトランジスターの間で光ビームを生成および遮断し、それによってクロックパルスを生成してカウンター回路をインクリメントします。
したがって、カウンターはシャフトの全体的な動きを統合または蓄積し、機械がどれだけ移動したかを電子的に示します。
私たちが気にするのは全体の動きを追跡することだけであり、方向の変化を考慮に入れる必要はありません。 動きのある場合は、この配置で十分です。
ただし、カウンターをインクリメントしたい場合 一方向の動きとデクリメント 動きの方向が逆の場合は、上下のカウンターと、異なる方向を区別する機能を備えたエンコーダー/デコード回路を使用する必要があります。
2セットのLED /フォトトランジスタペアを持つようにエンコーダを再設計すると、それらのペアは、方形波出力信号が90 o になるように位置合わせされます。 互いに位相がずれているため、 quadrature出力と呼ばれるものがあります。 エンコーダー(「求積法」という言葉は単に90 o を指します 角距離)。
時計回りのパルスシーケンスと反時計回りのパルスシーケンスを区別するために、位相検出回路をDタイプのフリップフロップで作成することができます。
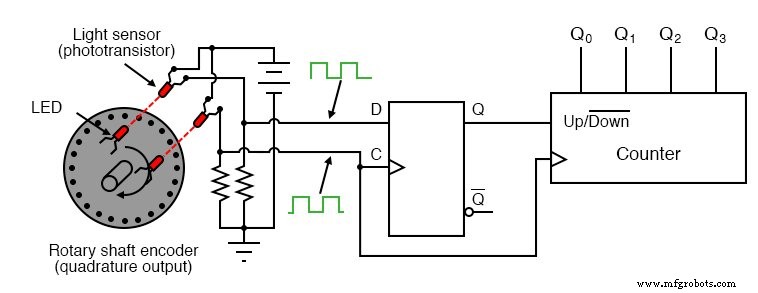
エンコーダが時計回りに回転すると、「D」入力信号の方形波が「C」入力方形波に先行します。つまり、「C」が「ロー」から「ロー」に移行するときに、「D」入力はすでに「ハイ」になっています。 「高い」、つまり設定 クロックパルスごとにDタイプのフリップフロップ(Q出力を「ハイ」にする)。
「ハイ」Q出力はカウンタを「アップ」カウントモードにし、エンコーダから(いずれかのLEDから)クロックが受信したクロックパルスはそれをインクリメントします。
逆に、エンコーダが回転を逆にすると、「D」入力は「C」入力波形より遅れます。つまり、「C」波形が「低」から「高」に遷移すると「低」になり、Dが強制されます。 -フリップフロップをリセットに入力します クロックパルスごとに状態(Q出力を「ロー」にする)。
この「ロー」信号は、エンコーダからのクロックパルスごとにデクリメントするようにカウンタ回路に命令します。
この回路、またはそれに非常によく似たものは、パルスエンコーダセンサーに基づくすべての位置測定回路の中心にあります。
このようなアプリケーションは、ロボット工学、CNC工作機械制御、および可逆的な機械的運動の測定を含むその他のアプリケーションで非常に一般的です。
関連するワークシート:
- 同期カウンターワークシート
産業技術