


有限状態マシン
フィードバックは魅力的なエンジニアリングの原則です。それは、かなり単純なデバイスまたはプロセスを実質的により複雑なものに変えることができます。フィードバックの効果が回路設計に意図的に統合され、驚くべき効果が見られました。
- コンパレータ+負帰還—————->制御可能なゲインアンプ
- コンパレータ+正帰還—————->ヒステリシス付きコンパレータ
- 組み合わせロジック+正のフィードバック—>マルチバイブレーター
プロセス計装の分野では、フィードバックを使用して、単純な測定システムを制御可能なものに変換します。
- 測定システム+負帰還->閉ループ制御システム
正と負の両方のフィードバックは、デバイスまたはシステムの動作にまったく新しいダイナミクスを追加する傾向があります。これらの新しいダイナミクスが有用なアプリケーションである場合もあれば、単に興味深い場合もあります。
ルックアップテーブルがメモリデバイスにプログラムされているため、データ出力からアドレス入力へのフィードバックにより、まったく新しいタイプのデバイスが作成されます。有限ステートマシン 、または FSM :
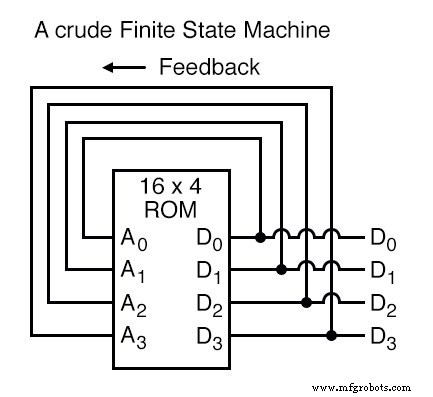
上記の回路は基本的な考え方を示しています。各アドレスに格納されたデータは、ROMがアドレス指定される次の格納場所になります。結果は、時間の経過とともに、出力で(ROMにプログラムされたシーケンスに続く)2進数の特定のシーケンスになります。
ただし、信号のタイミングの問題を回避するには、4ビットのDタイプフリップフロップを介してデータ出力をアドレス入力に接続し、制御されたクロックパルスのビートに合わせてシーケンスが段階的に実行されるようにする必要があります。
このようなデバイスの動作の例えは、それぞれがドアに識別番号(住所)があり、それぞれが別のP.O.の住所が記載された紙を含む私書箱の配列である可能性があります。そこに書かれた箱(データ)。最初のP.O.を開く人ボックスには、次のP.O.のアドレスが含まれています。開くボックス。
特定のパターンのアドレスをP.O.に保存することによってボックスの場合、各ボックスが開かれる順序、つまり紙が読み取られる順序を指定できます。
ROM内に16のアドレス可能なメモリ位置があるため、この有限状態マシンには、ラッチできる16の異なる安定した「状態」があります。これらの各状態では、次の状態のIDがROMにプログラムされ、次のクロックパルスの信号がアドレスとしてROMにフィードバックされるのを待ちます。
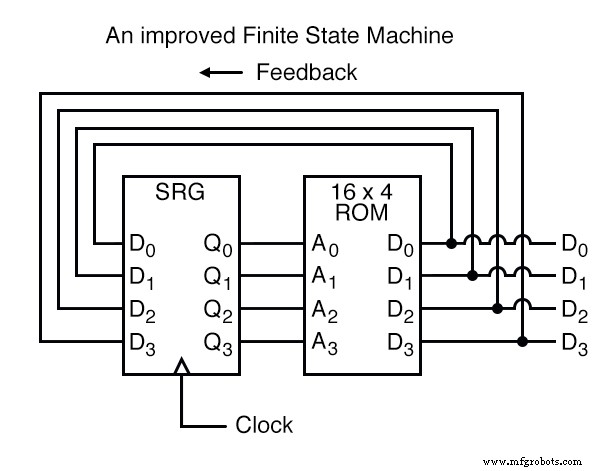
このようなFSMの有用なアプリケーションの1つは、グレイコードなどの任意のカウントシーケンスを生成することです。
アドレス----->データグレイコードカウントシーケンス: 0000 -------> 0001 0 0000 0001 -------> 0011 1 0001 0010 -------> 0110 2 0011 0011 -------> 0010 3 0010 0100 -------> 1100 4 0110 0101 -------> 0100 5 0111 0110 -------> 0111 6 0101 0111 -------> 0101 7 0100 1000 -------> 0000 8 1100 1001 -------> 1000 9 1101 1010 -------> 1011 10 1111 1011 -------> 1001 11 1110 1100 -------> 1101 12 1010 1101 -------> 1111 13 1011 1110 -------> 1010 14 1001 1111 -------> 1110 15 1000
FSMが行うように、グレイコードカウントシーケンスに従うようにしてください。0000から開始し、そのアドレス(0001)に格納されているデータを次のアドレスまでたどります(0011)、以下同様(0010)など。 on(0110)など。結果として、示されているプログラムテーブルでは、アドレス指定のシーケンスがアドレスからアドレスへと無計画にジャンプしますが、アクセスされる各アドレスを確認すると、次のことがわかります。 4ビットグレイコードの正しい順序に従います。
FSMが最後にプログラムされた状態(アドレス1000)に到達すると、そこに格納されているデータは0000になり、次のクロックパルスに合わせてアドレス0000でシーケンス全体が最初からやり直されます。
より多くのアドレスラインを備えたROMを使用し、プログラミングデータを追加することで、上記の回路の機能を拡張できます。
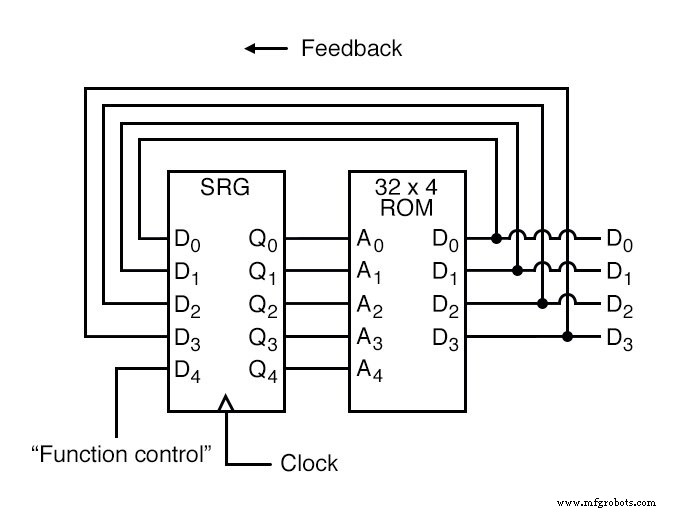
これで、「関数制御」入力としてより多くのアドレス行を利用して算術論理演算装置(+、-、x、/関数)に変換したルックアップテーブル加算回路と同様に、このFSMカウンターを使用してより多くのアドレスを生成できます。 1つのカウントシーケンスよりも、2つの機能制御ライン入力の組み合わせ(A4 =0または1)のそれぞれの4つのフィードバックビット(A0からA3)にプログラムされた異なるシーケンス。
アドレス----->データアドレス----->データ 00000 -------> 0001 10000 -------> 0001 00001 -------> 0010 10001 -------> 0011 00010 -------> 0011 10010 -------> 0110 00011 -------> 0100 10011 -------> 0010 00100 -------> 0101 10100 -------> 1100 00101 -------> 0110 10101 -------> 0100 00110 -------> 0111 10110 -------> 0111 00111 -------> 1000 10111 -------> 0101 01000 -------> 1001 11000 -------> 0000 01001 -------> 1010 11001 -------> 1000 01010 -------> 1011 11010 -------> 1011 01011 -------> 1100 11011 -------> 1001 01100 -------> 1101 11100 -------> 1101 01101 -------> 1110 11101 -------> 1111 01110 -------> 1111 11110 -------> 1010 01111 -------> 0000 11111 -------> 1110
A4が0の場合、FSMはバイナリでカウントされます。 A4が1の場合、FSMはグレイコードでカウントされます。いずれの場合も、カウントシーケンスは任意です。プログラマーの気まぐれによって決定されます。さらに言えば、プログラマーはいずれかのステップでシーケンスを0000にリサイクルすることを決定する可能性があるため、カウントシーケンスは16ステップである必要はありません。これは完全に柔軟なカウントデバイスであり、動作はROM内のソフトウェア(プログラミング)によって厳密に決定されます。
追加のアドレス入力およびデータ出力ラインを備えたROMチップを利用することにより、FSMの機能をさらに拡張できます。たとえば、次の回路を考えてみましょう。
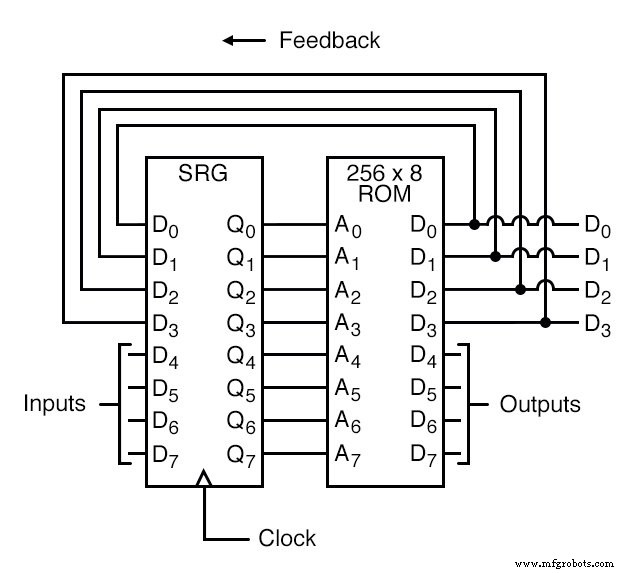
ここで、D0からD3のデータ出力は、A0からA3のアドレスラインへのフィードバック専用に使用されます。日付出力ラインD4からD7は、FSMの「状態」値以外のものを出力するようにプログラムできます。 4つのデータ出力ビットが4つのアドレスビットにフィードバックされているため、これは依然として16ステートデバイスです。
ただし、出力データを他のデータ出力行から取得することで、プログラマーは以前よりも自由に関数を構成できます。言い換えれば、このデバイスは単に数えるだけではありません!このFSMのプログラムされた出力は、フィードバックアドレスライン(A0からA3)の状態だけでなく、入力ライン(A4からA7)の状態にも依存します。
Dタイプのフリップフロップのクロック信号入力も、パルスジェネレータからのものである必要はありません。さらに興味深いことに、フリップフロップを外部イベントのクロックに接続して、入力信号が指示した場合にのみFSMが次の状態になるようにすることができます。
これで、「プログラム可能」という言葉の意味をよりよく満たすデバイスができました。 ROMに書き込まれるデータは、本当の意味でのプログラムです。出力は、デバイスへの入力と、デバイスが順番にオンになっている「ステップ」に基づいて、事前に確立された順序に従います。
これは、チューリングマシンの動作設計に非常に近いものです。 、Alan Turingによって発明された理論計算機であり、十分なメモリ容量があれば、既知の算術問題を解決できることが数学的に証明されています。
産業技術