


ブラシレスDCモーター
ブラシレスDCモーターは、ソリッドステートパワー半導体を利用できる従来のブラシ付きDCモーターから開発されました。では、なぜACモーターの章でブラシレスDCモーターについて説明するのですか?
ブラシレスDCモーターは、AC同期モーターに似ています。主な違いは、同期モーターが正弦波の逆起電力を発生させることです 、ブラシレスDCモーターの長方形または台形の逆起電力と比較して。
どちらも固定子が回転磁界を生成し、磁気回転子にトルクを発生させます。
同期モーターは通常、大きなマルチキロワットサイズであり、多くの場合、電磁石ローターを備えています。真の同期モーターは、電力線周波数の約数であるシングルスピードと見なされます。ブラシレスDCモーターは小さい傾向があり、永久磁石ローターを備えた数ワットから数十ワットです。
ブラシレスDCモーターの速度は、基準周波数にスレーブ化されたフェーズロックループによって駆動されない限り、固定されません。構造のスタイルは円筒形またはパンケーキのいずれかです。
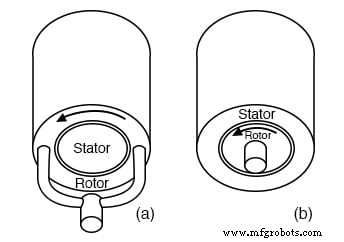
円筒形の構造:(a)ローターの外側、(b)ローターの内側
最も一般的な構造である円筒形は、2つの形態をとることができます(上の図)。最も一般的な円筒形のスタイルは、右上の内側にローターがあります。このスタイルのモーターは、ハードディスクドライブで使用されます。ローターをステーターの周囲の外側に配置することも可能です。
これは、シャフトのないブラシレスDCファンモーターの場合です。このスタイルの構造は短くて頑丈かもしれません。ただし、磁束の方向は回転軸に対して放射状です。
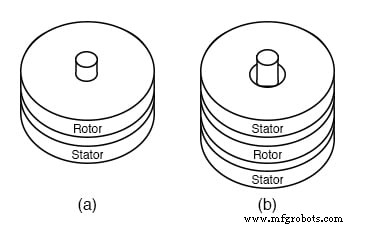
パンケーキモーターの構造:(a)シングルステーター、(b)ダブルステーター
高トルクパンケーキモーターは、ローターの両側にステーターコイルを備えている場合があります(上の図-b)。
フロッピーディスクドライブモーターのような低トルクのアプリケーションは、ローターの片側にステーターコイルがあれば十分です(上の図-a)。磁束の方向は軸方向、つまり回転軸に平行です。
転流機能は、さまざまなシャフト位置センサー(光学式エンコーダー、磁気式エンコーダー(レゾルバ、シンクロなど)、またはホール効果磁気センサー)によって実行できます。小型で安価なモーターは、ホール効果センサーを使用しています。
ホール効果センサーは、電子の流れが電流の方向に垂直な磁場の影響を受ける半導体デバイスです。これは、4端子の可変抵抗ネットワークのように見えます。 2つの出力の電圧は相補的です。
センサーに磁場をかけると、出力に小さな電圧変化が生じます。ホール出力は、パワーデバイスへのより安定したドライブを提供するためにコンパレータを駆動する場合があります。または、適切にバイアスされている場合、複合トランジスタステージを駆動する可能性があります。
より最近のホール効果センサーには、統合された増幅器とデジタル回路が含まれている場合があります。この3リードデバイスは、相巻線に給電するパワートランジスタを直接駆動する場合があります。センサーは、その位置を感知するために永久磁石ローターの近くに取り付ける必要があります。

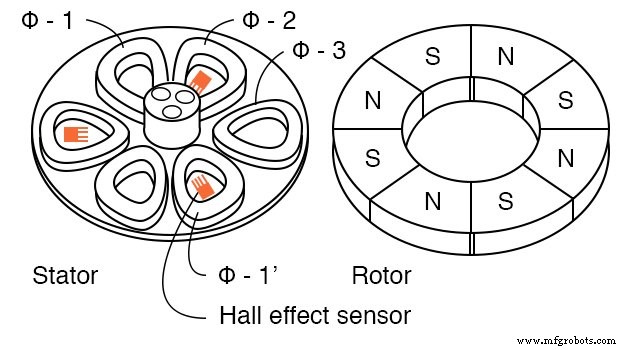
ホール効果センサーは3φブラシレスDCモーターを整流します
単純な円筒形の3φモーター(上の図)は、3つの固定子相のそれぞれに対してホール効果装置によって整流されます。永久磁石ローターの位置の変化は、通過するローター極の極性が変化するときにホールデバイスによって感知されます。
このホール信号は、固定子コイルが適切な電流で駆動されるように増幅されます。ここには示されていませんが、ホール信号は、より効率的な駆動波形のためにコンビナトリアルロジックによって処理される場合があります。
上記の円筒形モーターは、一定の速度を維持するためにフェーズロックループ(PLL)が装備されている場合、ハードドライブを駆動できます。同様の回路で、パンケーキフロッピーディスクドライブモーターを駆動できます(下の図)。繰り返しますが、一定の速度を維持するにはPLLが必要です。
ブラシレスパンケーキモーター
3φパンケーキモーターには、6つの固定子極と8つの回転子極があります。ローターは、8つの軸方向に磁化された交流極で磁化されたフラットフェライトリングです。ステーターの中央にあるベアリングに取り付けるために、ローターが軟鋼板で覆われていることは示していません。
鋼板はまた、磁気回路を完成させるのに役立ちます。固定子の極も鋼板の上に取り付けられており、磁気回路を閉じるのに役立ちます。
平らな固定子コイルは台形で、コイルにぴったりとフィットし、回転子の極に近づきます。 6固定子コイルは3つの巻線相で構成されています。
3つの固定子相に連続して通電すると、回転磁界が発生します。
永久磁石ローターは、同期モーターの場合と同様に追従します。 2極ローターは、回転磁界と同じ回転速度でこの磁界を追跡します。ただし、ローターに余分な極があるため、8極ローターはこの速度の約数で回転します。
ブラシレスDCファンモーターには次の機能があります:

ブラシレスファンモーター、2-φ
- 固定子には4極間に2相が分散しています
- ゼロトルクポイントを排除するための巻線のない4つの突出した極があります。
- ローターには4つのメインドライブポールがあります。
- ローターには、ゼロトルクポイントを排除するために8極が重ねられています。
- ホール効果センサーの間隔は物理的に45°です。
- ファンハウジングは、ステーターの上に配置されたローターの上に配置されます。
ブラシレスファンモーターの目標は、製造コストを最小限に抑えることです。これは、パフォーマンスの低い製品を3φから2φの構成に移行するインセンティブです。駆動方法によっては、4φモーターと呼ばれることもあります。
従来のDCモーターは、自己始動する場合、偶数の電機子極(2、4など)を持つことができないことを思い出してください。3、5、7が一般的です。したがって、仮想の4極モーターは、静止状態から始動できない最小トルクで静止する可能性があります。
巻線のない4つの小さな突極を追加すると、トルク対位置の曲線にリップルトルクが重なります。このリップルトルクを通常の通電トルク曲線に追加すると、トルクの最小値が部分的に削除されます。
これにより、すべての可能な停止位置でモーターを始動することが可能になります。通常の4極永久磁石ローターに8つの永久磁石極を追加すると、通常の4極リップルトルクに小さな2次高調波リップルトルクがかかります。
これにより、トルクの最小値がさらに削除されます。トルクの最小値がゼロに下がらない限り、モーターを始動できるはずです。最小トルクの除去に成功すればするほど、モーターの始動が容易になります。
2φステーターでは、ホールセンサーの間隔が90 °である必要があります。 電気。ローターが2極ローターの場合、ホールセンサーは90 °に配置されます。 物理的。 4極の永久磁石ローターがあるため、センサーは45 °に配置する必要があります 90 °を達成するための物理的 電気的間隔。 (上記のホール間隔に注意してください。)
トルクの大部分は、内側の固定子2φコイルと回転子の4極セクションとの相互作用によるものです。さらに、ホールセンサーが適切な整流信号を感知できるように、ローターの4極セクションは下部にある必要があります。
8極ローターセクションは、モーターの始動を改善するためだけのものです。

ブラシレスDCモーター2-φプッシュプルドライブ
上の図では、2φプッシュプルドライブ(4φドライブとも呼ばれます)は、2つのホール効果センサーを使用して4つの巻線を駆動します。センサーの間隔は90 °です。 電気的に離れており、90 °です 単極ローターの場合は物理的です。
ホールセンサーには2つの相補出力があるため、1つのセンサーが2つの対向する巻線に整流を提供します。
産業技術