


テスラ多相誘導電動機
ほとんどのACモーターは誘導モーターです。誘導電動機は、その頑丈さとシンプルさから好まれています。実際、産業用モーターの90%は誘導モーターです。
ニコラテスラは1883年に多相誘導モーターの基本原理を考案し、1888年までに半馬力(400ワット)モデルを採用しました。テスラは製造権をジョージウェスティングハウスに65,000ドルで売却しました。
最も大型(> 1hpまたは1kW)の産業用モーターは、多相誘導モーターです。 。多相とは、固定子に、対応するタイムシフトされた正弦波によって駆動される、モーターの極ごとに複数の異なる巻線が含まれていることを意味します。
実際には、これは2つまたは3つのフェーズです。大型産業用モーターは3相です。簡単にするために2相モーターの図を多数含めていますが、ほぼすべての多相モーターが3相であることを強調する必要があります。
誘導電動機 、固定子巻線は、ブラシ付きDC整流子モーターとは異なり、変圧器のように回転子導体に電流を誘導することを意味します。
AC誘導モーターの構造
誘導電動機は、電機子と呼ばれる回転子と、下図に示すように多相エネルギー源に接続された巻線を含む固定子で構成されています。以下の単純な2相誘導モーターは、ニコラテスラが1888年に導入した1/2馬力モーターに似ています。
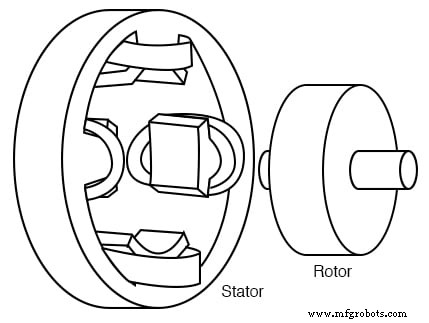
テスラ多相誘導モーター
上の図の固定子には、利用可能な電気エネルギーの位相に対応するコイルのペアが巻かれています。上記の2相誘導電動機の固定子には2対のコイルがあり、ACの2相のそれぞれに1対です。
ペアの個々のコイルは直列に接続され、電磁石の反対の極に対応します。つまり、ACの位相が極性を変えるまで、一方のコイルはN極に対応し、もう一方のコイルはS極に対応します。もう一方のコイルのペアは、最初のペアに対して空間的に90°の方向を向いています。
このコイルのペアは、2相モーターの場合、時間的に90°シフトされたACに接続されます。テスラの時代には、ACの2相の供給源は2相オルタネーターでした。
上の図の固定子には突出があります 、テスラの初期誘導モーターで使用されている、明らかな突出ポール。この設計は、今日までサブフラクショナル馬力モーター(<50ワット)に使用されています。ただし、より大きなモーターの場合、コイルが固定子のラミネーションに切り込まれたスロットに埋め込まれていると、トルクの脈動が少なくなり、効率が高くなります(下の図)。
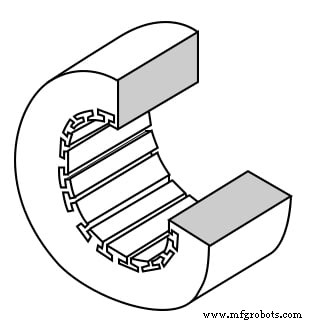
巻線用のスロットを示す固定子フレーム
固定子のラミネーションは、電気グレードの鋼のシートから打ち抜かれたスロットを備えた薄い絶縁リングです。これらのスタックはエンドスクリューで固定されており、エンドハウジングを保持することもできます。
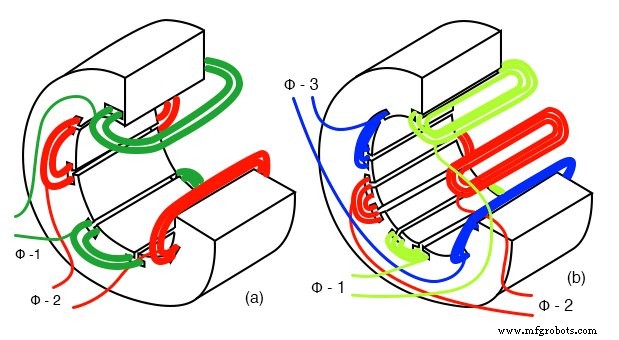
(a)2φおよび(b)3φ巻線の固定子
上の図では、2相モーターと3相モーターの両方の巻線が固定子スロットに取り付けられています。コイルは外部の固定具に巻かれ、スロットに組み込まれます。コイルの周囲とスロットの間に挟まれた絶縁体が摩耗を防ぎます。
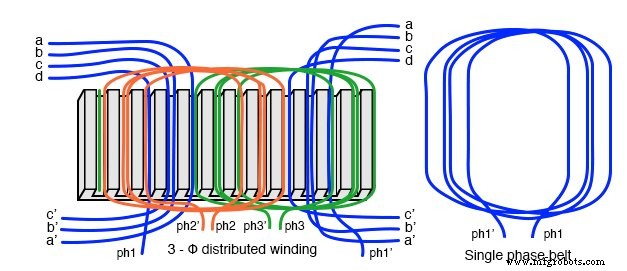
実際の固定子巻線は、上の図の極ごとの単一巻線よりも複雑です。 2φモーターとテスラの突極を備えた2φモーターを比較すると、コイルの数は同じです。実際の大型モーターでは、極巻線は、上記よりも多くの小さなスロットに挿入された同一のコイルに分割されます。
このグループはフェーズベルトと呼ばれます (下の図を参照してください)。位相ベルトの分散コイルは、いくつかの奇数次高調波をキャンセルし、極全体にさらに正弦波の磁場分布を生成します。これは同期モーターのセクションに示されています。
ポールの端にあるスロットは、他のスロットよりも回転数が少ない場合があります。エッジスロットには、2相の巻線が含まれる場合があります。つまり、フェーズベルトが重なります。
AC誘導モーターの人気の鍵は、単純なローター(下の図)から明らかなように、その単純さです。ローターは、シャフト、スチールラミネートローター、および埋め込まれた銅またはアルミニウムのかご形で構成されています。 、(b)に示すようにローターから取り外しました。
DCモーターアーマチュアと比較して、整流子はありません。これにより、ブラシ、アーク放電、スパーク、グラファイトダスト、ブラシの調整と交換、および整流子の再加工が不要になります。
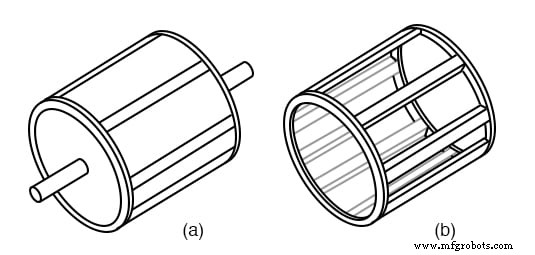
ラミネートされたローター。(a)リスケージが埋め込まれ、(b)導電性ケージがローターから取り外されています。
かご形の導体は、シャフトに対して歪んだり、ねじれたりする場合があります。ステータスロットとのミスアライメントにより、トルクの脈動が減少します。
回転子と固定子の両方のコアは、絶縁されたラミネーションのスタックで構成されています。ラミネーションは、渦電流損失を最小限に抑えるために、絶縁酸化物またはワニスでコーティングされています。ラミネーションに使用される合金は、ヒステリシス損失が低いように選択されています。
誘導電動機の動作理論
操作の簡単な説明は、固定子が回転子を引きずる回転磁界を生成することです。
誘導電動機の動作理論は、回転磁界に基づいています。回転磁界を生成する1つの方法は、永久磁石を回転させることです。動く磁束線が導電性ディスクを切断すると、磁石の動きに追従します。
導体を切断する磁束線は、導電性ディスクに電圧を誘導し、その結果として電流が流れます。この電流の流れにより、極性が永久磁石の動きに対抗する電磁石が作成されます– レンツの法則 。
電磁石の極性は、永久磁石を引っ張るようなものです。ディスクは永久磁石よりも少し遅い速度で追従します。
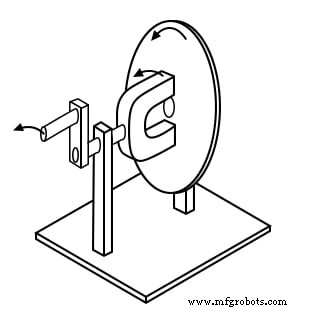
磁場を回転させると、導電性ディスクにトルクが発生します
ディスクによって発生するトルクは、ディスクを切断する磁束線の数とディスクを切断する速度に比例します。ディスクが永久磁石と同じ速度で回転する場合、ディスクを切断する磁束、誘導電流の流れ、電磁石の場、トルクはありません。
したがって、ディスクの速度は常に回転する永久磁石の速度よりも遅くなります。そのため、磁束線がディスクを切断すると電流が誘導され、永久磁石に続く電磁場がディスクに発生します。
ディスクに負荷がかかり、ディスクが遅くなると、より多くの磁束線がディスクを切断するため、より多くのトルクが発生します。トルクはスリップに比例します 、ディスクが回転磁石の後ろに落ちる程度。より多くのスリップは、導電性ディスクをより多くの磁束切断に対応し、より多くのトルクを発生させます。
アナログの自動車用渦電流速度計は、上記の原理に基づいています。ディスクがバネで拘束されている場合、ディスクと針のたわみは磁石の回転速度に比例します。
回転磁界は、互いに直角に配置された2つのコイルによって生成され、90°位相がずれた電流によって駆動されます。オシロスコープのリサージュパターンに精通している場合、これは驚くべきことではありません。
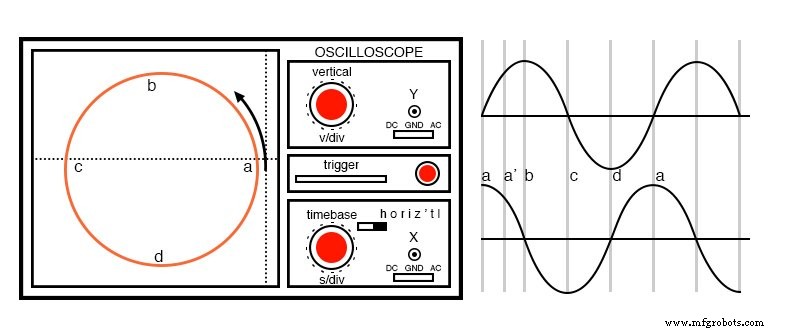
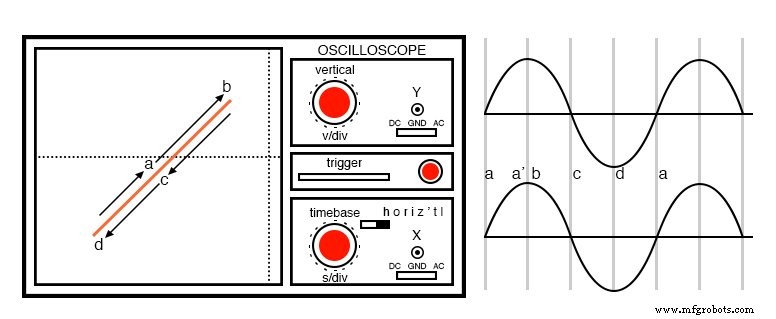
位相がずれている(90°)場合、正弦波は円形のリサージュパターンを生成します
上の図では、水平および垂直のオシロスコープ入力を90°位相のずれた正弦波で駆動することにより、円形のリサージュが生成されています。 (a)から始まり、最大の「X」と最小の「Y」のたわみで、トレースは(b)に向かって上下に移動します。
(a)と(b)の間では、2つの波形は45°で0.707Vpkに等しくなります。この点(0.707、0.707)は、(a)と(b)の間の円の半径上にあります。トレースは、最小の「X」と最大の「Y」のたわみで(b)に移動します。最大の負の「X」と最小の「Y」のたわみで、トレースは(c)に移動します。
次に、最小の「X」と最大の負の「Y」で、(d)に移動し、(a)に戻って、1サイクルを完了します。
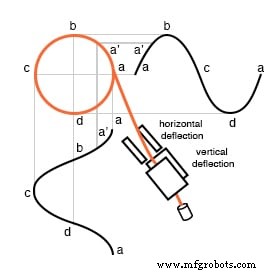
X軸の正弦およびY軸の正弦トレース円
この図は、空間内で直角になっているオシロスコープの偏向板に適用された2つの90°位相シフト正弦波を示しています。 90°の位相正弦波と直角偏向の組み合わせにより、2次元パターン(円)が生成されます。この円は、反時計回りに回転する電子ビームによってトレースされます。
参考までに、下の図は、同相正弦波が円形パターンを生成しない理由を示しています。 「X」と「Y」のたわみが等しいと、照らされたスポットが(a)の原点から(b)の右(1,1)まで、左下から(c)の原点まで、左下から(-1)に移動します。 .-1)(d)で、原点に直立します。線は、両方の軸に沿った等しいたわみによって生成されます。 y =xは直線です。
同相波形からの円運動はありません
位相が90°ずれた正弦波のペアが円形のリサージュを生成する場合、同様の電流のペアが円形の回転磁場を生成できるはずです。これは2相モーターの場合です。類推すると、空間に120°離れて配置され、対応する120°の相電流が供給される3つの巻線も、回転磁界を生成します。
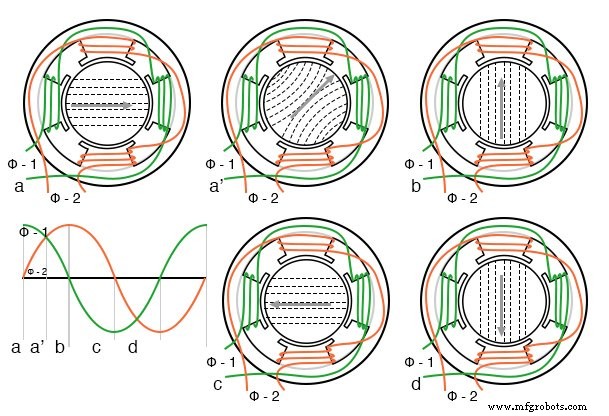
90°の位相正弦波からの回転磁界
上の図の90°の位相正弦波が点(a)から(d)に進むと、磁場は次のように反時計回りに回転します(図a〜d)。
- (a)最大φ-1、φ-2ゼロ
- (a ’)φ-170%、φ-270%
- (b)φ-1ゼロ、φ-2最大
- (c)φ-1最大負、φ-2ゼロ
- (d)φ-1ゼロ、φ-2最大負
フルモーター速度と同期モーター速度
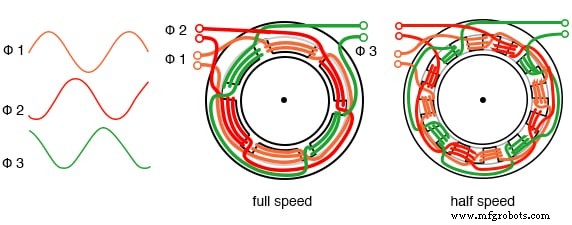
固定子の回転磁界の回転速度は、固定子の相ごとの極のペアの数に関連しています。以下の「フルスピード」の図には、合計6つの極または3つの極ペアと3つのフェーズがあります。ただし、フェーズごとに1つの極ペアしかありません。
磁場は正弦波サイクルごとに1回回転します。 60 Hzの電力の場合、フィールドは1秒あたり60回、または1分あたり3600回転(rpm)で回転します。 50 Hzの電力の場合、毎秒50回転または3000rpmで回転します。 3600および3000rpmは、同期速度です。 モーターの。
誘導電動機の回転子がこの速度に達することはありませんが、それは確かに上限です。モーターの極数を2倍にすると、磁場が空間内で180°回転して正弦波の360°になるため、同期速度が半分になります。
固定子の極を2倍にすると同期速度が半分になります
同期速度は次の式で与えられます:
N s =120・f / P N s =同期速度(rpm)f =印加電力の周波数、Hz P =相ごとの極の総数、2の倍数
例: 上記の「半速」の図には、1相(3相)ごとに4つの極があります。 50Hz電力の同期速度は次のとおりです。S=120・50/4 =1500 rpm
誘導電動機の簡単な説明は、固定子によって生成された回転磁界が回転子をそれと一緒に引きずるということです。
より正確な説明は、固定子の磁場が、変圧器の2次側を構成する回転子のかご形導体に交流電流を誘導することです。この誘導されたローター電流は、次に磁場を生成します。
回転する固定子の磁場は、この回転子の磁場と相互作用します。回転子フィールドは、回転する固定子フィールドと整列しようとします。その結果、かご形回転子が回転します。機械的なモータートルク負荷、ベアリング、風損、またはその他の損失がない場合、ローターは同期速度で回転します。
ただし、スリップ 回転子と同期速度固定子フィールドの間でトルクが発生します。トルクを発生させるのは、回転子の導体が滑るときに磁束を切断することです。したがって、負荷のかかったモーターは機械的負荷に比例してスリップします。
ローターが同期速度で動作する場合、ローターを切断するステーター磁束、ローターに誘導される電流、トルクはありません。
誘導電動機のトルク
モーターに最初に電力が供給されると、ローターは静止し、ステーターの磁場は同期速度N s で回転します。 。固定子フィールドは、同期速度N s で回転子を切断しています。 。回転子の短絡ターンに誘導される電流は最大であり、電流の周波数、ライン周波数も最大です。
回転子の速度が上がると、固定子磁束が回転子を切断する速度は、同期速度N s の差になります。 および実際のローター速度N、または(N s -N)。同期速度に対するローターを切断する実際の磁束の比率は、スリップとして定義されます。 :
s =(N s -N)/ N s ここで、N s =同期速度、N =ローター速度
回転子導体に誘導される電流の周波数は、モーター始動時のライン周波数と同じくらい高く、回転子が同期速度に近づくにつれて減少します。 ローター周波数 によって与えられます:
f r =s・fここで、s =スリップ、f =固定子電源周波数
100%トルクでのスリップは、通常、誘導モーターでは5%以下です。したがって、f =50 Hzのライン周波数の場合、ローターの誘導電流の周波数fr =0.05・50 =2.5Hzです。なんでこんなに低いの?固定子磁界は50Hzで回転します。ローター速度は5%遅くなります。
回転磁界は2.5Hzでのみローターを切断しています。 2.5 Hzは、同期速度と実際のローター速度の差です。ローターが少し速く回転する場合、同期速度では、磁束はローターをまったく切断しません、f r =0。
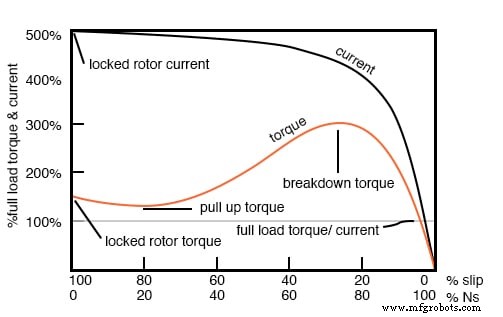
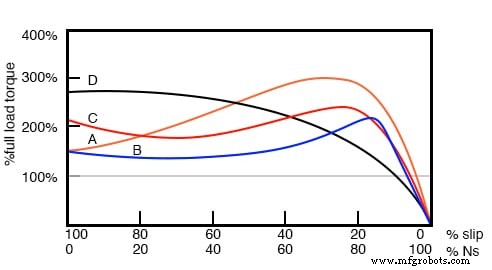
トルクと速度と%Slipの関係。 %N s =%同期速度
上のグラフは、ロックされたロータートルクとして知られる始動トルクを示しています。 (LRT)が全負荷トルクの100%を超えている (FLT)、安全な連続トルク定格。ロックされたロータートルクは、上記のグラフのモーターの例では、FLTの約175%です。
ロックされたローター電流として知られる始動電流 (LRC)は全負荷電流の500%です (FLC)、安全な動作電流。これは変圧器の二次側の短絡に類似しているため、電流は高くなります。ローターが回転し始めると、特定のクラスのモーターのトルクが少し減少して、プルアップトルクと呼ばれる値になる場合があります。 。
これは、始動モーターがこれまでに遭遇したトルクの最小値です。ローターが同期速度の80%を得ると、トルクは全負荷トルクの175%から300%まで増加します。この破壊トルク 通常よりも20%スリップが大きいためです。
この時点で電流はわずかに減少していますが、この時点を超えると急速に減少します。ローターが同期速度の数パーセント以内に加速すると、トルクと電流の両方が大幅に減少します。通常の操作では、スリップはわずか数パーセントになります。
動作中のモーターの場合、100%定格トルク未満のトルク曲線のどの部分も正常です。モーター負荷は、トルク曲線上の動作点を決定します。始動中の数秒間、モーターのトルクと電流が100%を超える場合がありますが、100%を超える連続動作は、モーターに損傷を与える可能性があります。
破壊トルクを超えるモータートルク負荷は、モーターを失速させます。 「機械的トルクがない」負荷状態では、トルク、スリップ、および電流はゼロに近づきます。この状態は、二次変圧器が開いているのと似ています。
上記のトルク曲線からかなりの変動を示すいくつかの基本的な誘導モーターの設計があります。さまざまな設計が、さまざまなタイプの負荷の開始と実行に最適化されています。さまざまなモーター設計およびサイズのロックされたロータートルク(LRT)は、全負荷トルク(FLT)の60%から350%の範囲です。
始動電流またはロックされたローター電流(LRC)は、全負荷電流(FLC)の500%から1400%の範囲です。この電流引き込みは、大型誘導モーターの始動の問題を引き起こす可能性があります。
NEMAおよびIECモータークラス
さまざまなタイプの負荷をより適切に駆動するために、トルク曲線(下の図)に対応するモーターのさまざまな標準クラス(または設計)が開発されました。米国電機工業会(NEMA)は、これらのドライブ要件を満たすためにモータークラスA、B、C、およびDを指定しています。
同様の国際電気標準会議(IEC)クラスNおよびHは、それぞれNEMABおよびC設計に対応しています。
NEMAデザインの特徴
クラスDを除くすべてのモーターは、全負荷で5%以下のスリップで動作します。
- クラスB(IECクラスN) モーターは、ほとんどのアプリケーションで使用されるデフォルトのモーターです。 LRTの始動トルク=FLTの150%から170%で、過度の始動電流(LRT)なしでほとんどの負荷を始動できます。効率と力率が高いです。通常、ポンプ、ファン、工作機械を駆動します。
- クラスA 始動トルクはクラスBと同じです。ドロップアウトトルクと始動電流(LRT)が高くなります。このモーターは、射出成形機で発生する一時的な過負荷を処理します。
- クラスC(IECクラスH) LRT =FLTの200%で、クラスAおよびBよりも始動トルクが高くなります。このモーターは、コンベヤー、クラッシャー、往復ポンプやコンプレッサーなど、一定速度で駆動する必要のあるハードスタート負荷に適用されます。
- クラスD モーターの始動トルク(LRT)が最も高く、スリップが大きいため始動電流が低くなります(FLTで5%から13%)。スリップが大きいと速度が遅くなります。速度調整が不十分です。ただし、モーターは、エネルギー貯蔵フライホイールを必要とするような非常に可変速度の負荷の駆動に優れています。アプリケーションには、パンチプレス、鋏、エレベーターなどがあります。
- クラスE モーターはクラスBの高効率バージョンです。
- クラスF モーターのLRC、LRT、およびブレークダウントルクは、クラスBよりもはるかに低くなっています。モーターは、一定の、簡単に始動できる負荷を駆動します。
誘導電動機の力率
誘導電動機は、電力線に遅れる(誘導)力率を示します。大型のフル装備の高速モーターの力率は、大型の高速モーターの場合、90%にもなる可能性があります。 3/4全負荷では、最大の高速モーター力率は92%になる可能性があります。
小型の低速モーターの力率は、50%まで低くすることができます。始動時の力率は10%から25%の範囲で、ローターが速度に達すると上昇します。
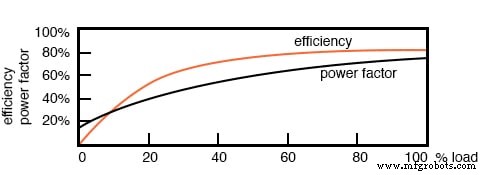
力率(PF)は、モーターの機械的負荷によって大きく異なります(下図)。無負荷のモーターは、2次側に抵抗負荷がない変圧器に似ています。二次(回転子)から一次(固定子)への抵抗はほとんど反映されません。
したがって、電力線は10%PFという低い無効負荷を認識します。ローターに負荷がかかると、増加する抵抗成分がローターからステーターに反射され、力率が増加します。
誘導電動機の力率と効率
誘導電動機の効率
大型の三相モーターは、小型の三相モーターよりも効率的であり、ほとんどすべての単相モーターです。大きな誘導モーターの効率は、全負荷で95%に達する可能性がありますが、90%がより一般的です。
電流の大部分が磁化磁束の維持に関係しているため、軽負荷または無負荷の誘導モーターの効率は低くなります。トルク負荷が増加すると、磁化に関連する電流は固定されたままで、トルクを生成するためにより多くの電流が消費されます。 75%FLTでの効率は、100%FLTでの効率よりもわずかに高くなる可能性があります。
効率は、50%FLTで数パーセント低下し、25%FLTでさらに数パーセント低下します。効率は25%FLT未満でのみ低下します。負荷による効率の変化を上の図に示します。
誘導電動機は通常、すべての動作条件下で機械的負荷を開始および駆動できることを保証するために特大です。多相モーターに定格トルクの75%未満で負荷がかかり、効率がピークに達する場合、効率はわずかに25%FLTまで低下します。
ノラ力率補正器
NASAのFrankNolaは、1970年代後半に、単相誘導モーターの省エネ装置として力率補正装置(PFC)を提案しました。これは、完全に負荷がかかっていない誘導モーターは、完全に負荷がかかっているモーターよりも効率が低く、力率が低いという前提に基づいています。したがって、部分的に負荷がかかったモーター、特に1-φモーターで節約されるエネルギーがあります。
固定子の磁場を維持するために消費されるエネルギーは、負荷の変化に対して比較的固定されています。完全に負荷がかかったモーターには何も節約できませんが、部分的に負荷がかかったモーターへの電圧を下げて、磁場を維持するために必要なエネルギーを減らすことができます。
これにより、力率と効率が向上します。これは、それが意図された、悪名高い非効率的な単相モーターにとって良い概念でした。
この概念は、大型の3相モーターにはあまり適用できません。効率が高い(90%以上)ため、節約できるエネルギーはそれほど多くありません。さらに、95%の効率のモーターは、50%の全負荷トルク(FLT)で94%の効率、25%のFLTで90%の効率です。
100%FLTから25%FLTに移行する際の潜在的なエネルギー節約は、効率の差95%-90%=5%です。これは、全負荷ワット数の5%ではなく、低負荷時のワット数の5%です。 Nola力率補正器は、パンチプレスのように、ほとんどの時間(25%FLT未満)アイドル状態の3相モーターに適用できる可能性があります。
高価な電子コントローラーの回収期間は、ほとんどのアプリケーションにとって魅力的ではないと推定されています。ただし、電子モータースターターまたは速度制御の一部としては経済的かもしれません。
オルタネーターとしての誘導電動機
誘導電動機は、同期速度の100%を超えるトルクで駆動される場合、オルタネーターとして機能する可能性があります(下図)。これは、「負の」スリップの数%、たとえば-1%のスリップに相当します。
これは、同期速度よりも速くモーターを回転させているため、ローターはステーターの回転磁界よりも1%速く進んでいることを意味します。通常、モーターでは1%遅れます。回転子は固定子の磁場を反対方向に切断しているため(先行)、回転子は固定子に電圧を誘導し、電気エネルギーを電力線にフィードバックします。
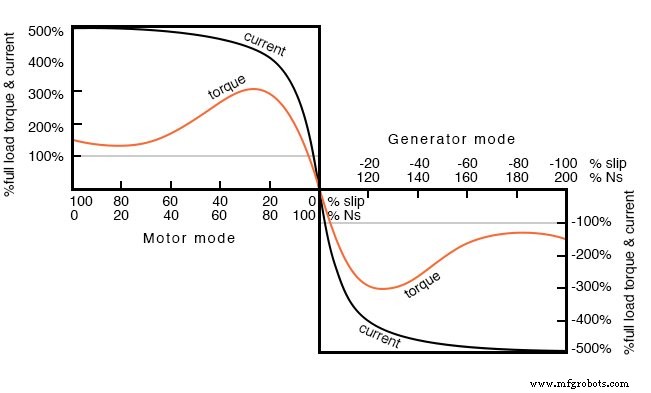
負のトルクにより、誘導モーターが発電機になります
そのような誘導発電機 50または60Hzの電力の「ライブ」ソースによって励起される必要があります。電力会社の停電が発生した場合、電力を生成することはできません。このタイプのオルタネーターは、待機電源としては不適切なようです。
補助電力風力タービン発電機として、修理作業員を保護するために自動停電切断スイッチを必要としないという利点があります。
フェイルセーフです。
固定子相と並列にコンデンサを配置することにより、(電力網からの)小規模な遠隔設置を自励式にすることができます。負荷が取り除かれると、残留磁気によって少量の電流が流れる可能性があります。
この電流は、電力を消費することなくコンデンサによって流れることができます。発電機が全速力になると、電流が増加して固定子に磁化電流を供給します。この時点で荷重がかかる可能性があります。電圧レギュレーションが不十分です。誘導電動機は、コンデンサを追加することで自励式発電機に変換できます。
始動手順は、通常の電力線電圧を固定子に印加することにより、風力タービンをモーターモードで速度を上げることです。同期速度を超える風によるタービン速度は負のトルクを発生させ、電力を電力線にフィードバックし、電気キロワット時メーターの通常の方向を逆にします。
誘導電動機は電力線に遅れ力率を示しますが、誘導オルタネーターは先行力率を示します。誘導発電機は、従来の発電所では広く使用されていません。
蒸気タービン駆動の速度は安定しており、同期オルタネーターの要求に応じて制御可能です。同期オルタネーターもより効率的です。
風力タービンの速度は制御が難しく、突風による風速変動の影響を受けます。誘導オルタネーターは、固有のスリップによるこれらの変動にうまく対処することができます。これにより、同期発電機よりもギアトレインと機械部品にかかるストレスが少なくなります。
ただし、この許容速度変動は約1%にすぎません。したがって、直接線接続された誘導発電機は、風力タービンでは固定速度であると見なされます(真の可変速度オルタネーターについては、二重給電誘導発電機を参照してください)。
共通のシャフト上の複数の発電機または複数の巻線を切り替えて、さまざまな風の状態に対応するために高速と低速を提供することができます。
モーター始動と速度制御
一部の誘導モーターは、始動時に全負荷電流の1000%以上を消費する可能性があります。ただし、数百パーセントがより一般的です。数キロワット以下の小さなモーターは、電力線に直接接続することで始動できます。
大きなモーターを始動すると、線間電圧の低下が発生し、他の負荷に影響を与える可能性があります。モーター始動定格のサーキットブレーカー(スローブローヒューズに類似)は、数キロワットのモーターを始動するための標準のサーキットブレーカーに取って代わる必要があります。このブレーカーは、始動中は高い過電流を受け入れます。
単巻変圧器誘導モータースターター
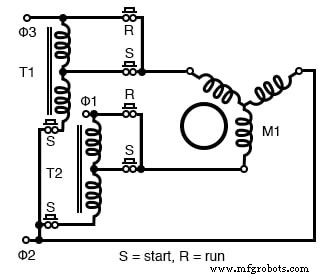
50 kWを超えるモーターは、モータースターターを使用して、ライン電流を全負荷電流の数百パーセントから数百パーセントに減らします。断続的な負荷の単巻変圧器は、開始間隔中に固定子電圧を数分の1の間低下させ、その後、上の図のように全線間電圧を印加する場合があります。
S接点を閉じると、開始間隔中に電圧が低下します。起動後、S接点が開き、R接点が閉じます。これにより、始動電流が、たとえば全負荷電流の200%に減少します。単巻変圧器は短い始動間隔でのみ使用されるため、連続使用ユニットよりもかなり小さいサイズになる場合があります。
単相プロビジョニングでの三相モーターの実行
三相モーターは、単相モーターと同じくらい簡単に単相で動作します。どちらかのモーターの唯一の問題は始動です。三相プロビジョニングが予想される場合、単相で使用するために三相モーターを購入することがあります。
電力定格は、1つの未使用の巻線を補うために、同等の単相モーターよりも50%大きくする必要があります。単相は、3番目の巻線と直列の始動コンデンサと同時に1対の巻線に適用されます。
下図のモーター始動時に始動スイッチが開きます。実行中、開始コンデンサよりも小さいコンデンサが保持される場合があります。
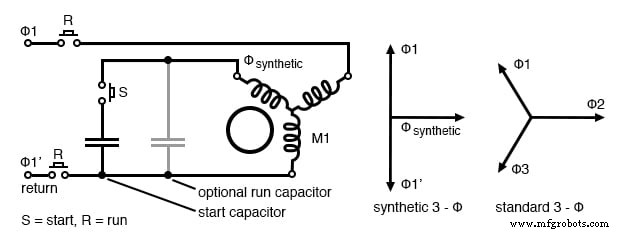
単相での三相モーターの始動
単相で三相モーターを実行するための上の図の回路は、静的位相コンバーターとして知られています。 モーターシャフトに負荷がかかっていない場合。さらに、モーターは三相発電機として機能します。
三相電力は、他の三相機器に電力を供給するために、3つの固定子巻線から利用できます。コンデンサは合成を供給します 始動用の∠180°単相電源端子間の∠90°のほぼ中間の位相。
上に示すように、モーターは動作中にほぼ標準の3-φを生成します。 Matt Isserstedtは、家庭用機械工場に電力を供給するための完全な設計を示しています。
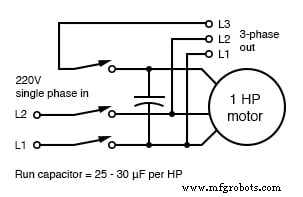
自己起動型静的位相変換器。実行コンデンサ=HPあたり25-30µF。図7、ハンラハンから適応
静的位相変換器にはトルク負荷がないため、通常の始動コンデンサよりもかなり小さいコンデンサで始動することができます。十分に小さい場合は、ランコンデンサとして回路に残っている可能性があります(上の図を参照)。
ただし、実行コンデンサが小さいほど、3相電力出力が向上します。さらに、これらのコンデンサを調整して、3つのフェーズで測定された電流を均等にすることで、最も効率的なマシンが得られます。ただし、コンバータをすばやく始動するには、約1秒間大きな始動コンデンサが必要です。ハンラハンは建設の詳細を提供します。
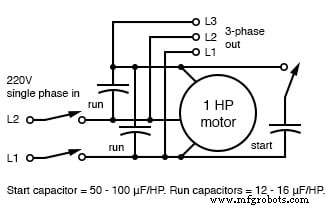
より効率的な静的位相変換器。開始コンデンサ=50-100µF / HP。実行コンデンサ=12-16µF / HP。図1、ハンラハンから引用
複数のフィールドを持つ誘導モーター
誘導電動機は、複数の界磁巻線、たとえば、1800および900rpmの同期速度に対応する4極および8極巻線を含む場合があります。どちらかのフィールドにエネルギーを与えることは、固定子コイルを再配線するよりも複雑ではありません。
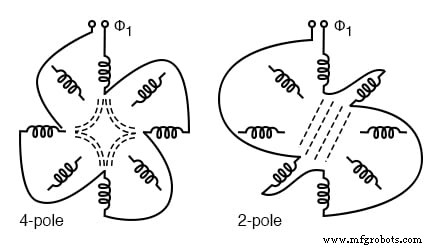
複数のフィールドで速度を変更できます
フィールドがリード線を引き出してセグメント化されている場合は、上記の2相モーターの場合のように、4極から2極に再配線(または切り替え)できます。 22.5°セグメントは45°セグメントに切り替え可能です。わかりやすくするために、1つのフェーズの配線のみを上に示しています。
したがって、私たちの誘導モーターは複数の速度で動作する可能性があります。上記の60Hzモーターを4極から2極に切り替えると、同期速度が1800rpmから3600rpmに増加します。
Q: モーターが50Hzで駆動される場合、対応する4極および2極の同期速度はどれくらいになりますか?
A:
N s =120f / P =120 * 50/4 =1500 rpm(4極)N s =3000 rpm(2極)
可変電圧の誘導モーター
駆動ファンなどの用途向けの小型かご形誘導電動機の速度は、線間電圧を下げることで変更できます。これにより、負荷に利用できるトルクが減少し、速度が低下します(下の図を参照)。
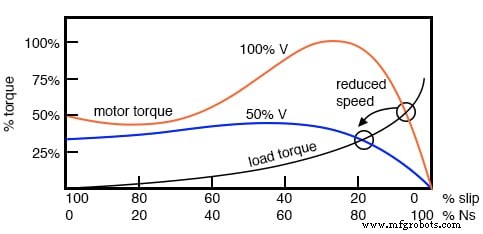
可変電圧は誘導モーターの速度を制御します
誘導電動機の電子速度制御
最新のソリッドステート電子機器は、速度制御のオプションを増やします。 50または60Hzのライン周波数をより高い値またはより低い値に変更することにより、モーターの同期速度を変更できます。ただし、モーターに供給される電流の周波数を下げると、リアクタンスX L も下がります。 固定子電流が増加します。
これにより、固定子の磁気回路が飽和し、悲惨な結果を招く可能性があります。実際には、周波数を下げるとモーターへの電圧を下げる必要があります。
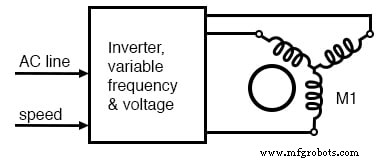
電子可変速ドライブ
逆に、駆動周波数を上げてモーターの同期速度を上げることができます。ただし、電流を通常の値に維持し、トルクを維持するには、リアクタンスの増加に打ち勝つために電圧を上げる必要があります。
インバーターは、パルス幅変調出力を使用して正弦波をモーターに近似します。これは、オンまたはオフ、高または低のいずれかであるチョップド波形であり、「オン」時間のパーセンテージは瞬間的な正弦波電圧に対応します。
電子機器が誘導電動機の制御に適用されると、単純なものから複雑なものまで、さまざまな制御方法が利用可能になります。
- スカラーコントロール: フィードバックなしで電圧と周波数のみを制御する上記の低コストの方法。
- ベクターコントロール: ベクトル位相制御とも呼ばれます。固定子電流の磁束とトルクを生成する成分は、モーターのトルク-速度曲線を強化するためにリアルタイムで測定または推定されます。これは計算集約的です。
- 直接トルク制御: 精巧な適応モーターモデルにより、フィードバックなしで磁束とトルクをより直接的に制御できます。このメソッドは、負荷の変化にすばやく対応します。
テスラ多相誘導電動機の概要
- 多相誘導モーター 積層固定子に埋め込まれた多相巻線と、積層回転子に埋め込まれた導電性かご形で構成されています。
- 固定子内を流れる三相電流は回転磁界を生成し、回転子に電流とその結果としての磁界を誘導します。ロータートルクは、ローターが回転するステーターフィールドの少し後ろを滑るときに発生します。
- 単相モーターとは異なり、多相誘導モーターは自己始動します。
- モータースターター 運転中に必要とされるよりも大きな始動トルクを提供しながら、電力線の負荷を最小限に抑えます。ライン電流低減スターター 大型モーターにのみ必要です。
- 三相モーターは、始動すると単相で動作します。
- 静的位相変換器 は、シャフト負荷のない単相で動作する3相モーターであり、3相出力を生成します。
- 複数の界磁巻線 極数を変更することにより、複数の個別のモーター速度に再配線できます。
リニアインダクションモーター
誘導電動機の巻線型固定子とかご形回転子は、円周方向で切断され、リニア誘導電動機に展開されます。直線移動の方向は、固定子相への駆動の順序によって制御されます。
リニア誘導電動機は、高速旅客列車の駆動装置として提案されています。これまで、スムーズな乗り心地に必要な磁気反発浮上システムを備えたリニア誘導モーターは、実験的な設置を除いて、コストがかかりすぎていました。
ただし、リニアインダクションモーターは、2013年に次世代の海軍空母CVNX-1の蒸気駆動カタパルト航空機発射システムに取って代わる予定です。これにより、効率が向上し、メンテナンスが削減されます。
関連ワークシート:
- ACモーター理論ワークシート
産業技術