


単相誘導電動機
三相モーターは単相電源から運転することができます。ただし、自己起動しません。どちらの方向からでも手動で開始でき、数秒で速度が上がります。 1つの巻線が使用されていないため、3φの電力定格の2/3しか発生しません。

3-φモーターは1-φパワーで動作しますが、始動しません
単相モーターのシングルコイル
単相誘導モーターのシングルコイルは回転磁界を生成しませんが、0°および180°の電気で最大強度に達する脈動磁界を生成します。
単相固定子は、回転しない脈動磁場を生成します
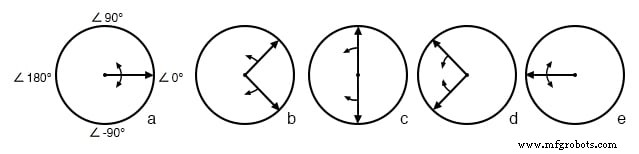
別の見方は、単相電流によって励起されたシングルコイルが2つの逆回転磁界フェーザを生成し、0°(上の図-a)と180°(図e)で1回転あたり2回一致することです。フェーザが90°と-90°に回転すると、図cでキャンセルされます。
45°と-45°(図b)では、+ x軸に沿って部分的に加算され、y軸に沿ってキャンセルされます。同様の状況が図dに存在します。これらの2つのフェーザの合計は、空間内で静止しているフェーザですが、時間的に極性が交互になります。したがって、始動トルクは発生しません。
ただし、ローターが同期速度より少し遅い速度で前方に回転すると、前方に回転するフェーザーに対して10%のスリップで最大トルクが発生します。 10%のスリップより上または下で発生するトルクは少なくなります。
ローターは、逆回転磁界フェーザに対して200%〜10%のスリップが見られます。逆回転フェーザからは、2倍の周波数リップル以外のトルク(トルク対スリップ曲線を参照)はほとんど発生しません。したがって、ローターが始動すると、単相コイルはトルクを発生します。
ローターを逆方向に始動すると、逆回転するフェーザーの速度に近づくのと同じくらい大きなトルクが発生します。
単相誘導電動機は、多相誘導電動機に典型的な、鋼の積層のシリンダーに埋め込まれた銅またはアルミニウムのリスケージを備えています。
永久分割コンデンサモーター
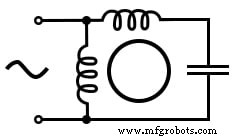
単相問題を解決する1つの方法は、単相から2相電力を引き出す2相モーターを構築することです。これには、90 °の間隔で配置された2つの巻線を備えたモーターが必要です。 電気、90 °変位した2相の電流が供給されます 時間内に。これは、永久分割コンデンサモーターと呼ばれます。
永久分割コンデンサ誘導モーター
このタイプのモーターは、モーターが速度に達すると、電流の大きさが増加し、後方への時間シフトが発生し、トルクが全速力で脈動します。解決策は、損失を最小限に抑えるためにコンデンサ(インピーダンス)を小さく保つことです。
損失は、隈取磁極モーターの場合よりも少なくなります。このモーター構成は、最大1/4馬力(200ワット)でうまく機能しますが、通常は小型のモーターに適用されます。コンデンサを他の巻線と直列に切り替えることにより、モーターの方向を簡単に逆にすることができます。このタイプのモーターは、この章の別の場所で説明されているサーボモーターとしての使用に適合させることができます。
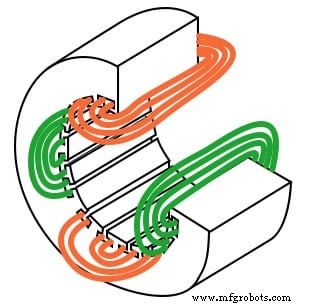
固定子コイルが埋め込まれた単相誘導モーター
単相誘導モーターは、より大きなサイズのモーターの場合、固定子にコイルが埋め込まれている場合があります。ただし、サイズが小さいほど、目立つ極を備えた集中巻線を構築するための複雑さが軽減されます。
コンデンサ-誘導電動機を始動
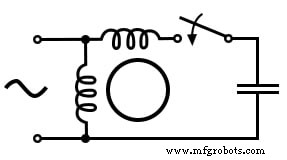
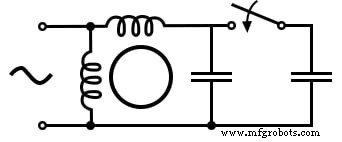
下の図では、モーターの速度が上がったときに遠心スイッチによってスイッチが切られる場合、補助巻線を介して単相誘導モーターを始動するために、より大きなコンデンサーを使用できます。さらに、補助巻線は、過度の温度上昇を緩和するために、抵抗単相モーターで使用されるよりもはるかに太いワイヤーの巻き数になる場合があります。
その結果、空調用コンプレッサーのような重い負荷に対して、より多くの始動トルクを利用できるようになります。このモーター構成は非常にうまく機能するため、マルチ馬力(マルチキロワット)サイズで利用できます。
コンデンサー始動誘導モーター
コンデンサー運転モーター誘導モーター
コンデンサ始動モーターのバリエーション(下図)は、始動トルクを高くするために比較的大きなコンデンサーでモーターを始動しますが、始動後に小さな値のコンデンサーを残して、過電流を流さずに運転特性を改善します。コンデンサー駆動モーターの追加の複雑さは、より大きなサイズのモーターにとって正当化されます。
コンデンサー駆動モーター誘導モーター
モーター始動コンデンサーは、2つの+から+(または-から-)の直列接続された極性電解コンデンサーである可能性がある二重アノード非極性電解コンデンサーである可能性があります。このようなAC定格の電解コンデンサは損失が非常に大きいため、モーターの始動などの断続的なデューティ(1秒オン、60秒オフ)にのみ使用できます。
モーター運転用のコンデンサーは、電解構造ではなく、低損失のポリマータイプでなければなりません。
抵抗単相モーター誘導モーター
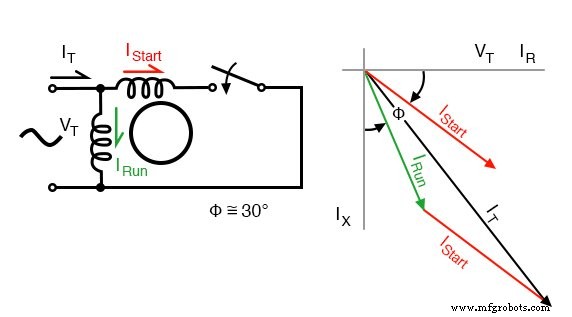
巻数がはるかに少ない補助巻線の場合、より小さなワイヤが90 °に配置されます。 主巻線に電気的に接続されているため、単相誘導モーターを始動できます。インダクタンスが低く抵抗が高いため、電流は主巻線よりも位相シフトが少なくなります。
約30 ° 位相差が得られる場合があります。このコイルは適度な始動トルクを生成し、同期速度の3/4で遠心スイッチによって切断されます。この単純な(コンデンサなしの)配置は、簡単に起動できる負荷を駆動する最大1/3馬力(250ワット)のモーターに適しています。
抵抗単相モーター誘導モーター
このモーターは、隈取磁極モーター(次のセクション)よりも始動トルクが大きくなりますが、同じ部品で構築された2相モーターほどではありません。始動中の補助巻線の電流密度が非常に高いため、結果として急激な温度上昇により、頻繁な再始動や始動負荷の低下が妨げられます。
ノラ力率補正器
NASAのFrankNolaは、1970年代半ばにAC誘導モーターの効率を改善するための力率補正装置を提案しました。これは、誘導電動機が全負荷未満では非効率的であるという前提に基づいています。この非効率性は力率の低さと相関関係があります。
力率が1未満の場合は、固定子に必要な磁化電流が原因です。この固定電流は、モーター負荷が減少するにつれて、総モーター電流に占める割合が大きくなります。軽負荷では、完全な磁化電流は必要ありません。印加電圧を下げ、力率と効率を改善することで、これを減らすことができます。
力率補正器は力率を感知し、モーター電圧を下げるため、より高い力率を回復し、損失を減らします。
単相モーターは三相モーターの約2〜4倍非効率であるため、1-φモーターの潜在的なエネルギー節約があります。すべての固定子の磁化電流が必要なため、全負荷のモーターを節約することはできません。
電圧を下げることはできません。しかし、完全にロードされていないモーターからの潜在的な節約があります。公称117VACモーターは、最高127 VAC、最低104VACで動作するように設計されています。つまり、たとえば117 VACの冷蔵庫など、104 VACを超える温度で動作させると、完全にロードされません。
力率コントローラが線間電圧を104〜110VACに下げるのは安全です。初期ライン電圧が高いほど、潜在的な節約が大きくなります。もちろん、電力会社が110 VACに近い電力を供給している場合、モーターはアドオンデバイスなしでより効率的に動作します。
実質的にアイドル状態で、FLCが25%以下の単相誘導モーターは、PFCの候補です。ただし、年間で長時間稼働する必要があります。また、製材のこぎり、パンチプレス、コンベヤーのようにアイドル状態が長くなるほど、数年間の操作でコントローラーにお金を払う可能性が高くなります。
より効率的な3-φモーターと比較して、3倍の支払いが簡単になるはずです。 1日数時間しか稼働しないモーターの場合、PFCのコストを回収することはできません。
概要:単相誘導モーター
- 単相誘導モーター 90 °近くの位相がずれた電流によって駆動される補助固定子巻線がないと、自己始動しません。 。開始後、補助巻線はオプションです。
- 永久分割コンデンサモーターの補助巻線 起動時と実行時にコンデンサが直列に接続されています。
- コンデンサー始動誘導モーター 始動時に補助巻線と直列にコンデンサがあるだけです。
- コンデンサー駆動モーター 通常、始動用の補助巻線と直列に大きな無極性電解コンデンサがあり、実行中は小さな非電解コンデンサがあります。
- 抵抗単相モーターの補助巻線 抵抗の違いにより、始動時に主巻線との位相差が発生します。
関連ワークシート:
- ACモーター理論ワークシート
産業技術