


サイクロイドドライバーとは何ですか?設計、3D印刷、テスト
このチュートリアルでは、サイクロイドドライブとは何か、どのように機能するかを学び、独自のモデルを設計して3D印刷する方法を説明し、実際に実際に見て、どのように機能するかをよりよく理解できるようにします。
次のビデオを見るか、以下のチュートリアルを読むことができます。
サイクロイドドライブは、コンパクトでありながら堅牢な設計で非常に高い減速比を提供する独自のタイプの減速機です。スパーやプラネタリーなどの従来のギアドライブと比較して、同じスペースまたはステージで最大10倍のはるかに高い減速率を達成できます。それに加えて、実質的にバックラッシュがなく、より高い負荷容量、剛性、および最大90%の高効率を特長としています。これらの特性により、サイクロイドドライブは、ロボット工学、工作機械、製造装置など、位置決めの精度とパフォーマンスが重要となる多くのアプリケーションに適しています。
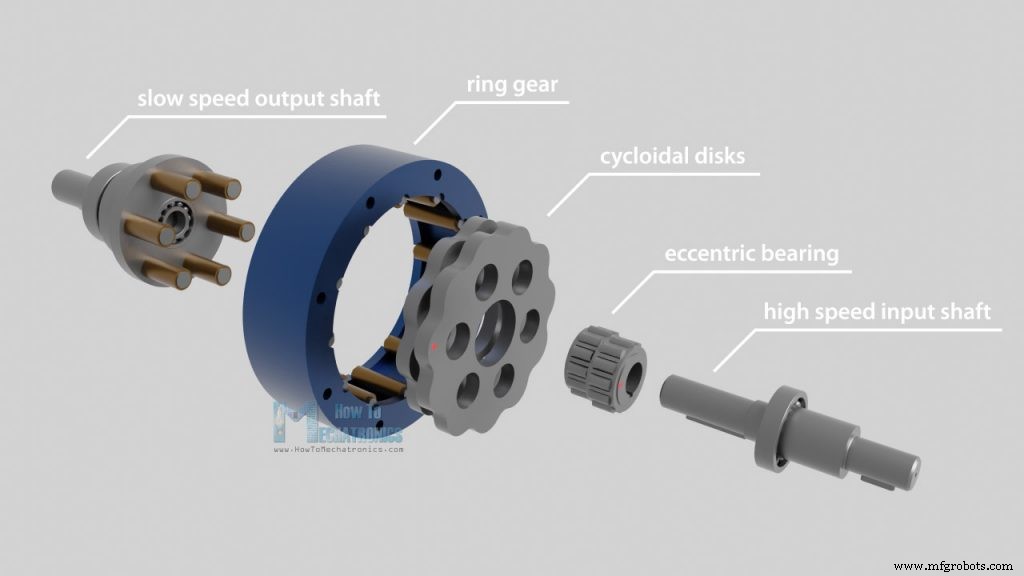
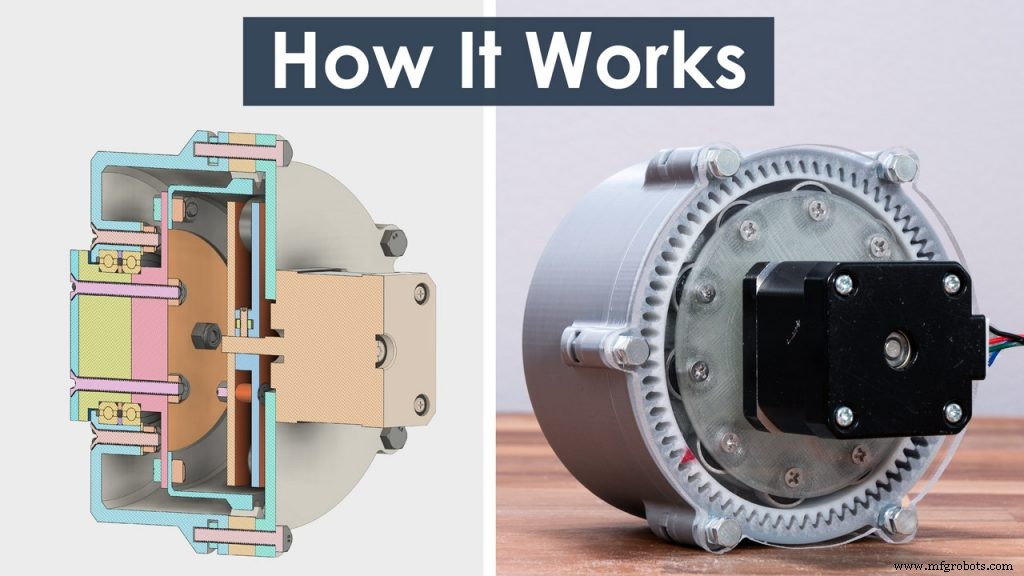
中身とサイクロイドドライブの仕組みを見てみましょう。サイクロイドドライブは、高速入力シャフト、偏心ベアリングまたはサイクロイドカム、2つのサイクロイドディスクまたはカムフォロア、ピンとローラーを備えたリングギア、およびピンとローラーを備えた低速出力シャフトの5つの主要コンポーネントで構成されています。
入力シャフトは偏心軸受を駆動し、偏心軸受はリングギアハウジングの内周の周りのサイクロイドディスクを駆動します。偏心運動により、サイクロイドディスクの歯またはローブがリングギアハウジングのローラーと噛み合い、減速して逆回転します。
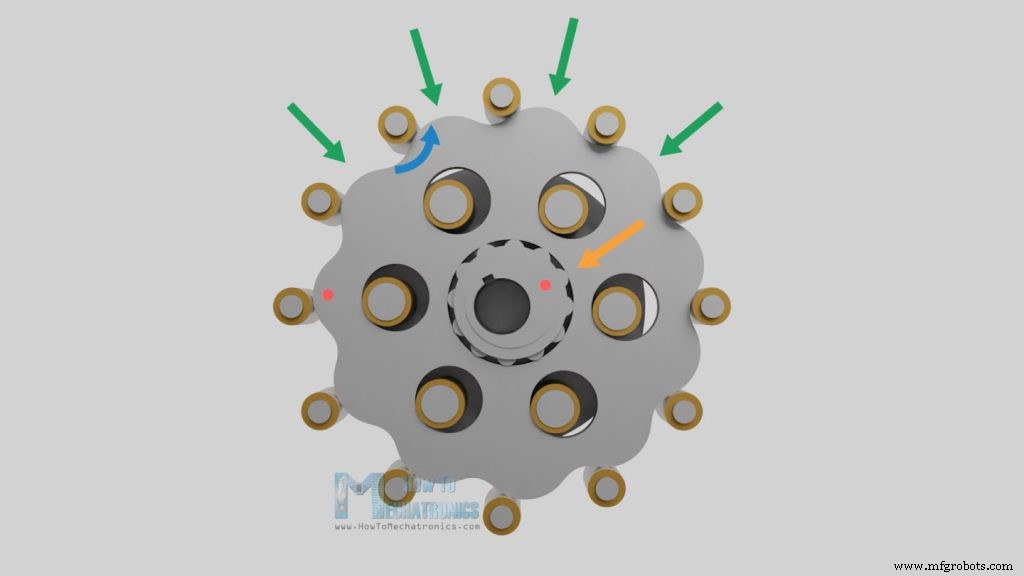
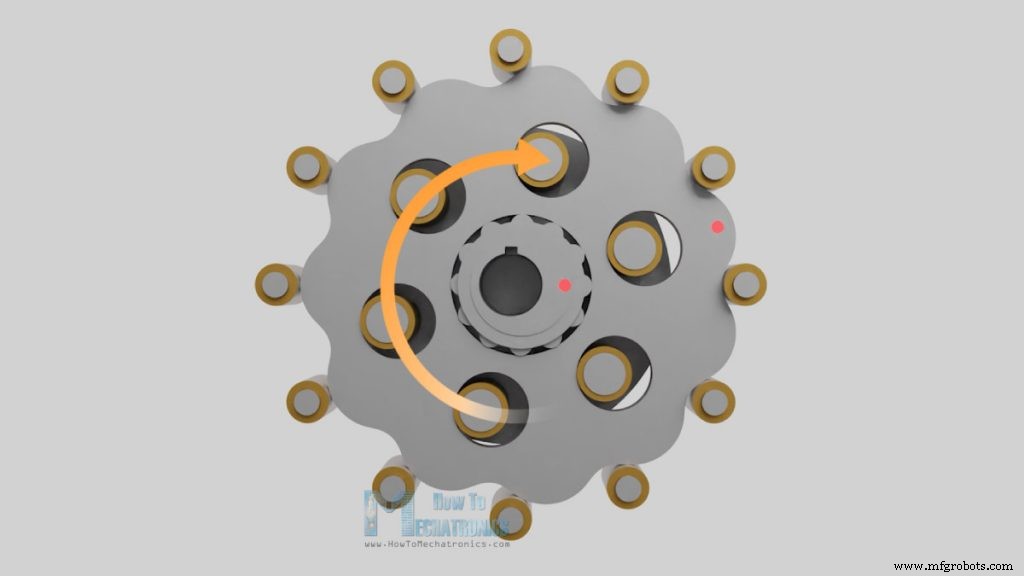
ここで詳しく見ると、偏心ベアリングが実際にサイクロイドディスクをリングギアローラーに押し付けていることがわかります。
独特のディスク形状とリングギアローラーに対するその位置により、偏心ベアリングが進行するにつれて、回転前のディスクローブは次のリングギアローラーを通過またはジャンプできなくなりますが、代わりに、スリップまたは後方に回転します。この動作が、実際にディスクの逆回転を引き起こします。
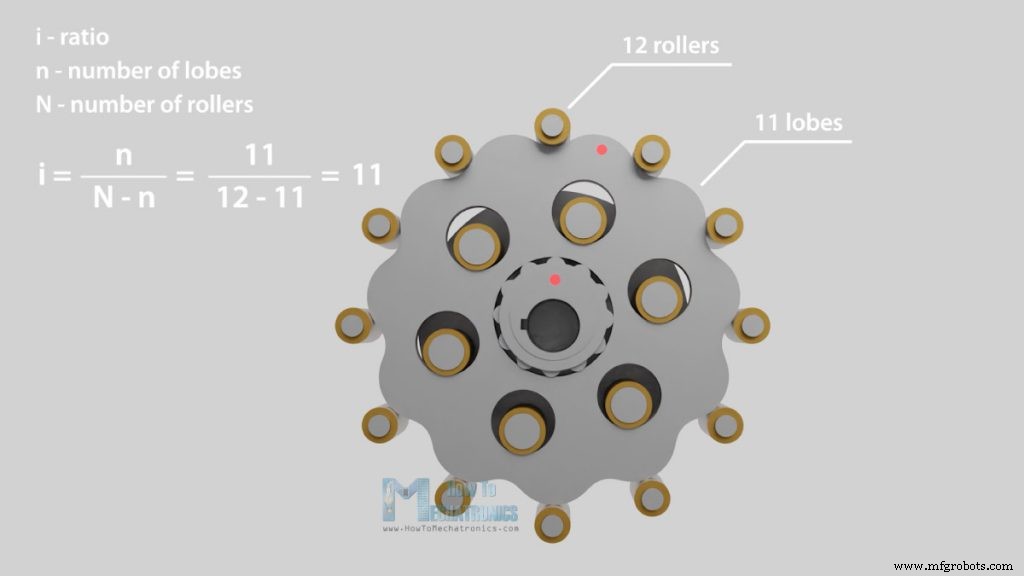
一般に、リングギアハウジングのピンの数と比較して、ディスク上のサイクロイドローブは1つ少なくなっています。これにより、偏心ベアリングが1回転すると、サイクロイドディスクが1ローブの距離だけ移動します。このことから、減速比はリングギアのピン数のみに依存していることがわかります。
たとえば、ここではリングギアに12個のピンがあります。これは、サイクロイドディスクに11個のローブがあることを意味し、11:1の比率、つまり出力速度が11倍遅くなります。ディスク、リングギアローラー、または偏心ベアリングのサイズは、減速比にまったく影響しません。
減少した回転は、サイクロイドディスクの穴を介して出力シャフトピンに伝達されます。
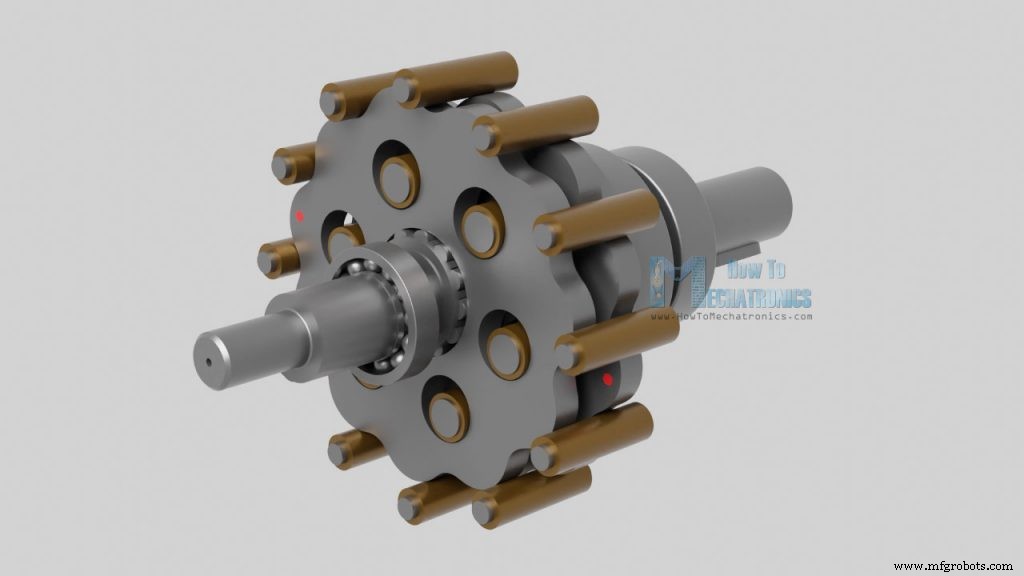
偏心運動によって引き起こされる不均衡な力を補償し、より高速でよりスムーズな動作を提供するために、180度位相をずらして配置された2つのサイクロイドディスクがあります。
サイクロイドドライブという名前は、ディスクのプロファイルに由来します。ディスクのプロファイルはサイクロイドに由来しますが、ビデオの次のセクションで、独自のサイクロイドドライブを設計します。
サイクロイドドライブがどのように機能するかがわかったので、3Dプリントできる独自のモデルの設計に進むことができます。このデモ例を3D印刷しようとすると、機能する可能性がありますが、3D印刷材料はギアボックスに現れる力や摩擦に耐えるのに十分な強度がないため、すぐに失敗します。
重要な部品は、通常はブッシングであるローラーです。これは、材料が金属の場合に最適なオプションですが、PLA材料では、代わりにボールベアリングを使用する必要があります。
そのことを念頭に置いて、これが私が設計し、ローラーにボールベアリングを使用したサイクロイドドライブです。
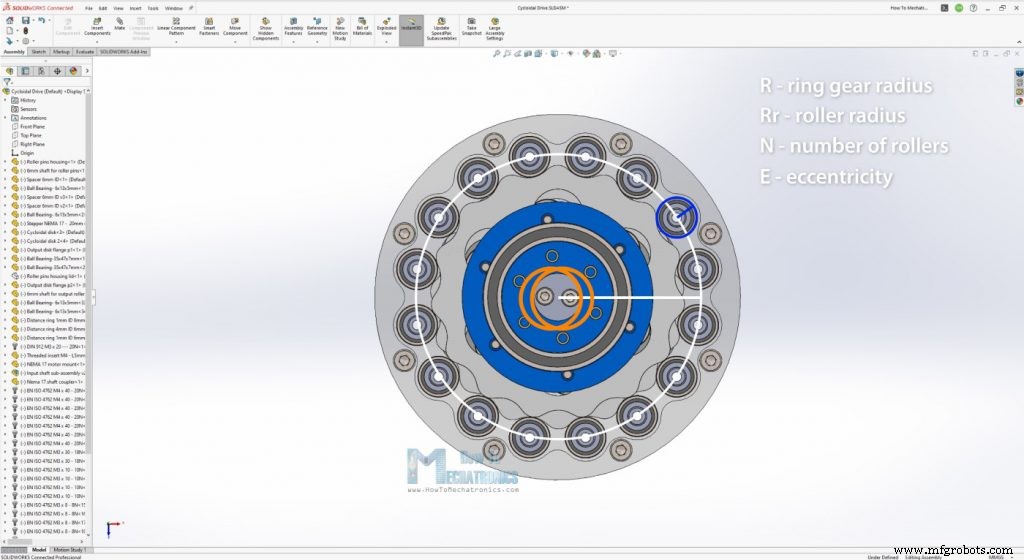
サイクロイドドライブを設計する場合、サイクロイドディスクのサイズと形状を定義する4つの主要な入力パラメータがあります。それは、リングギアの半径、ローラーの半径、これらのローラーの数、および偏心です。
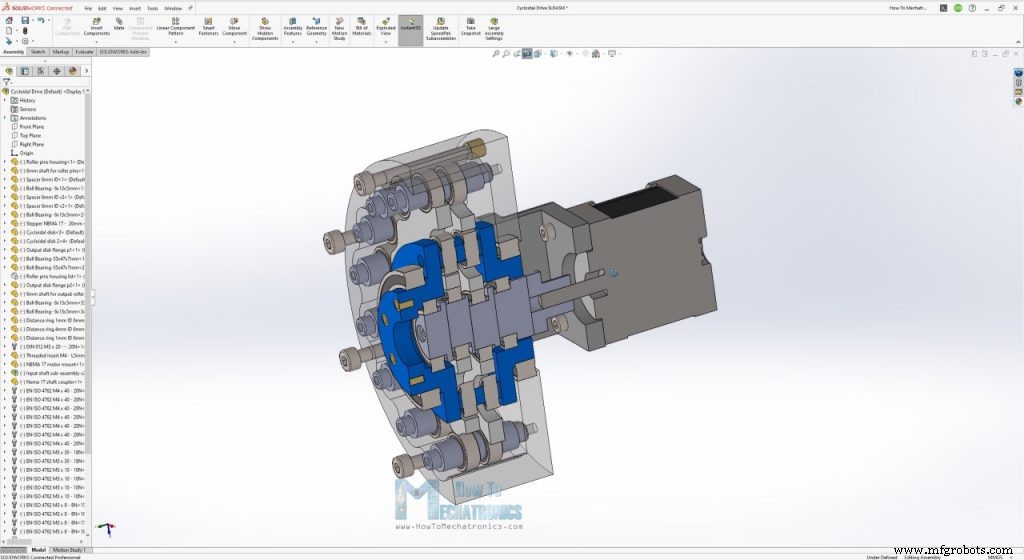
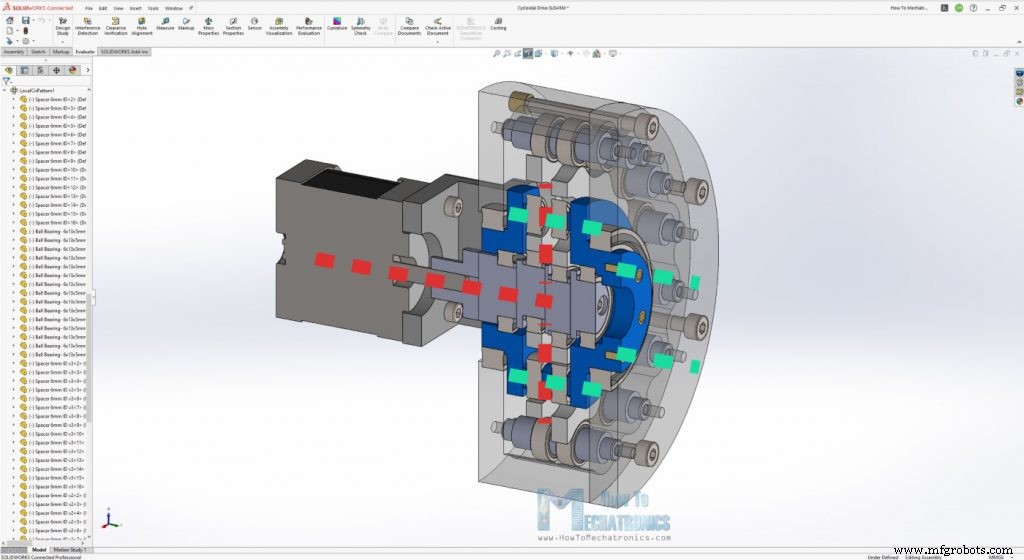
これが、SOLIDWORKSを使用して設計し、ローラーにボールベアリングを使用して設計したサイクロイドドライブです。
この時点で、このプロジェクトを後援してくれたSOLIDWORKSに一言お願いします。 3DEXPERIENCEWorldについて聞いたことがありますか。 SOLIDWORKSが主催する毎年恒例のイベント?
3DEXPERIENCE World 2022は、デザイナー、エンジニア、起業家、メーカーの活気に満ちたコミュニティを結集して、最新のテクノロジーとベストプラクティスについて学び、出会い、知識を共有します。
必ず今日、 SOLIDWORKS.COM/3DXW22_HOWTOMECHで登録してください。 、そして実質的に無料で参加できます。
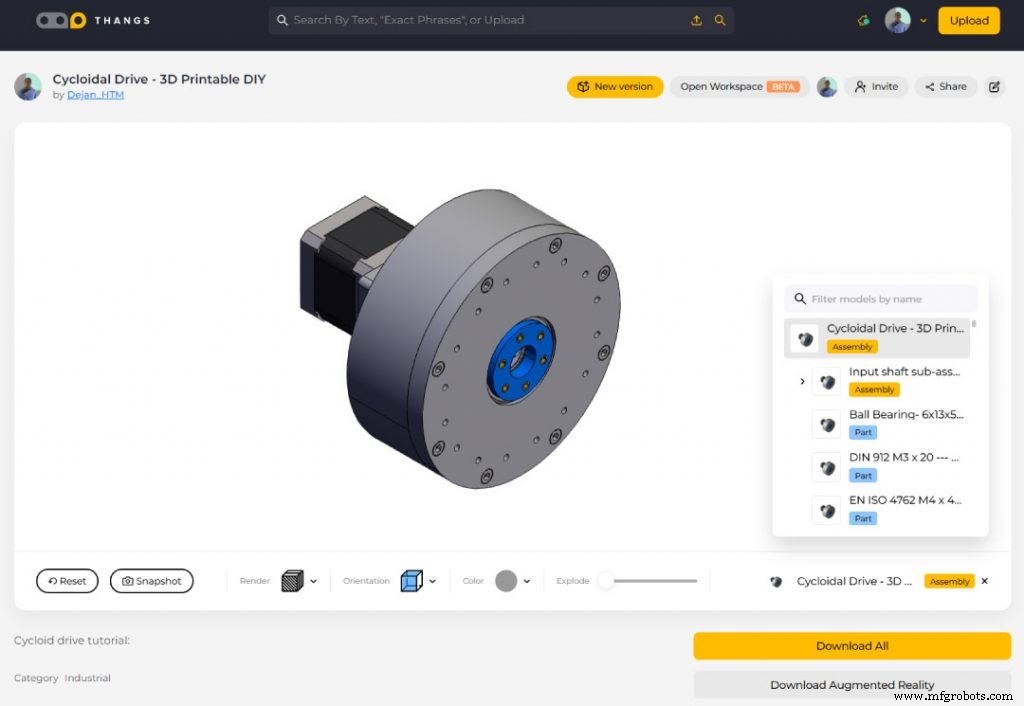
それでも、この3DモデルをSTEPファイルとして見つけてダウンロードしたり、Thangsのブラウザで調べたりすることができます:
3Dモデルの.STEPファイルはThangsからダウンロードできます。
このチュートリアルをサポートしてくれたThangsに感謝します。
パーツの3Dプリントに使用されるSTLファイルについては、こちらからダウンロードできます:
関連プロジェクト
波動歯車装置、別名ハーモニックドライブとは何ですか?ロボット工学アプリケーションに最適なギアセット!?
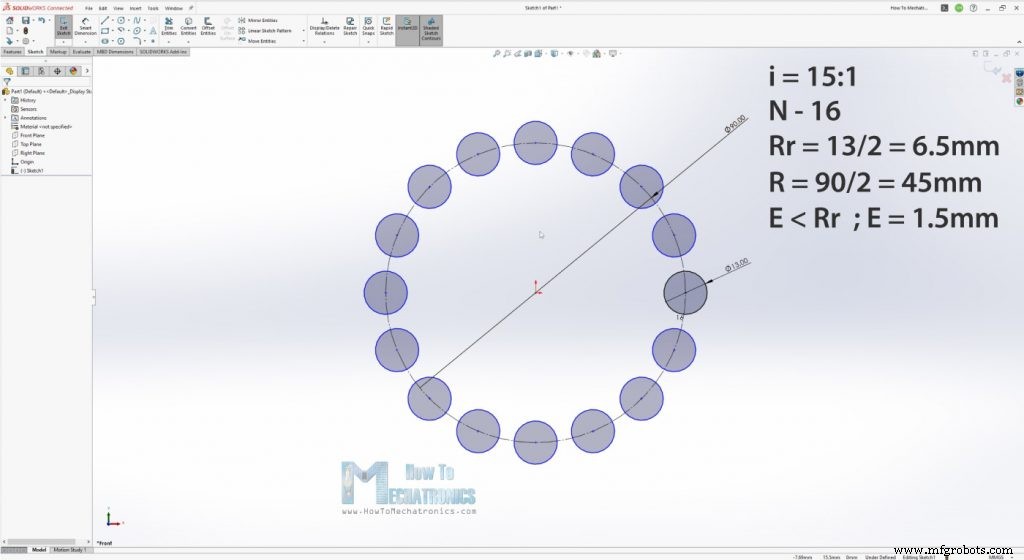
私が最初に定義したのは、このギアボックスに15:1の減速比が必要だったということでした。つまり、16個のリングギアローラーが必要でした。そこで、円周に16個のローラーを配置したSOLIDWORKSでスケッチを描きます。
そこで、外径13mmのローラーにベアリングを使用することにしました。これらの2つのパラメータに従って、リングギアのピッチ直径をどのサイズにするかを定義できました。 90mmに設定しました。偏心値はローラー径の半分以下にする必要があり、1.5mmの値を選択しました。
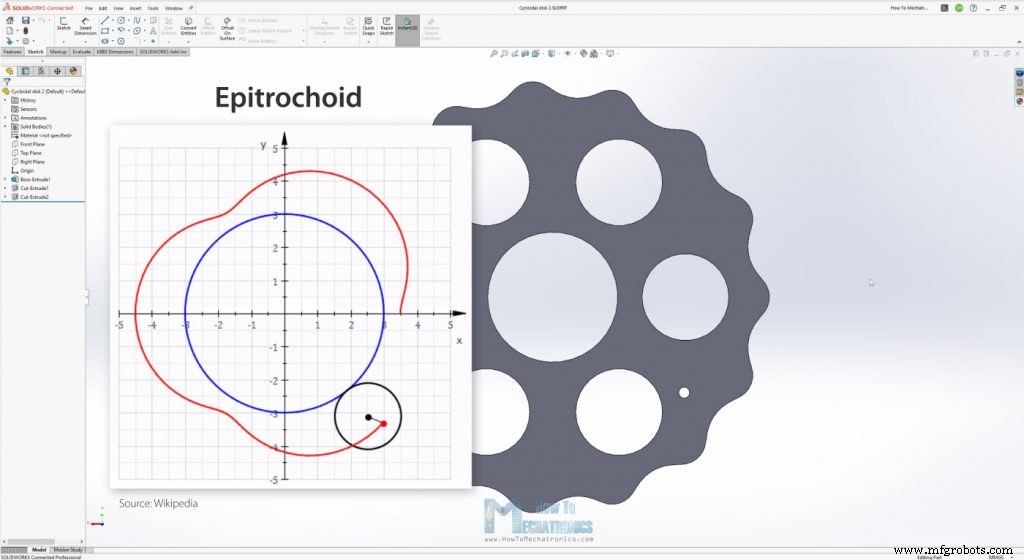
4つの主要な入力パラメータができたので、サイクロイドディスクの形状またはプロファイルを描画できます。先に述べたように、ディスクプロファイルは、円を滑らずに直線に沿って転がるときに円上の点によってトレースされる曲線であるサイクロイド、またはそのバリエーションである、円の円周上を転がるときにトレースされるエピサイクロイドに由来します。 。
Epitrochoidと呼ばれる別のバリエーションがあります。このバリエーションでは、トレースポイントが外側の円の中心から離れており、これが実際にサイクロイドディスクプロファイルに基づいています。
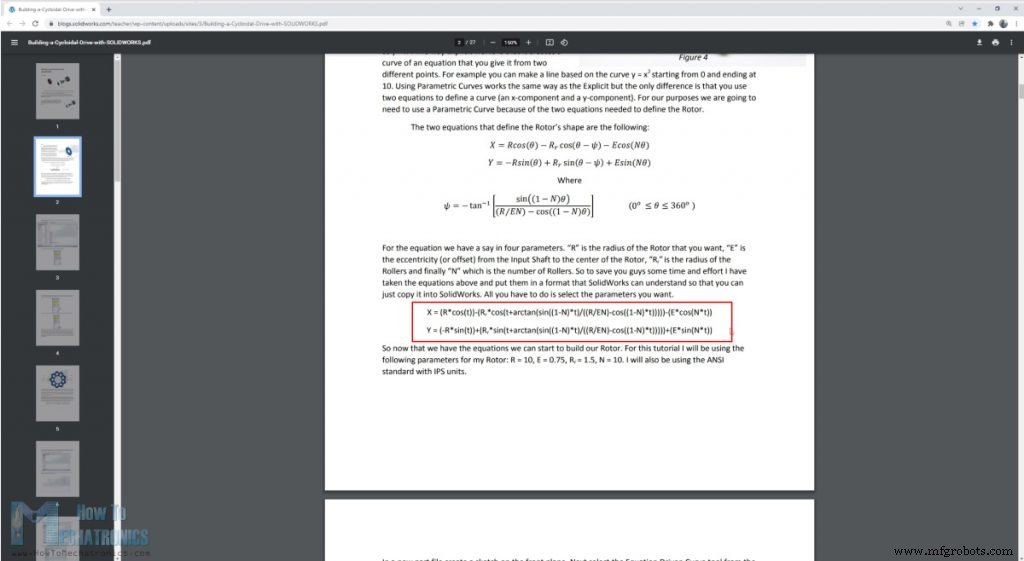
このような曲線を描くために、ここでこれらのパラメトリック方程式を使用できますが、ローラーの直径や離心率など、それらに含める他のパラメーターもあります。これは少し複雑になりますが、幸いなことに、OmarYounisがSOLIDWORKSEducationブログ用に作成したすばらしいドキュメントがあり、これらすべてのパラメータを単一のXおよびYパラメトリック方程式に組み合わせています。
方程式は次のとおりです。
これで、プロファイルを生成するために、SOLIDWORKSのEquations Driven Curveツールを使用して、2つの方程式を適切に挿入すると、サイクロイドディスクプロファイルが生成されます。もちろん、入力パラメータには値を挿入する必要があります。
また、「t」パラメータが0〜2 * piまたは360度の場合、曲線は生成されないことに注意してください。したがって、t2パラメータを2 * piより少し短く設定してから、単純なスプラインを使用して接続できる小さなギャップのある曲線を生成する必要があります。
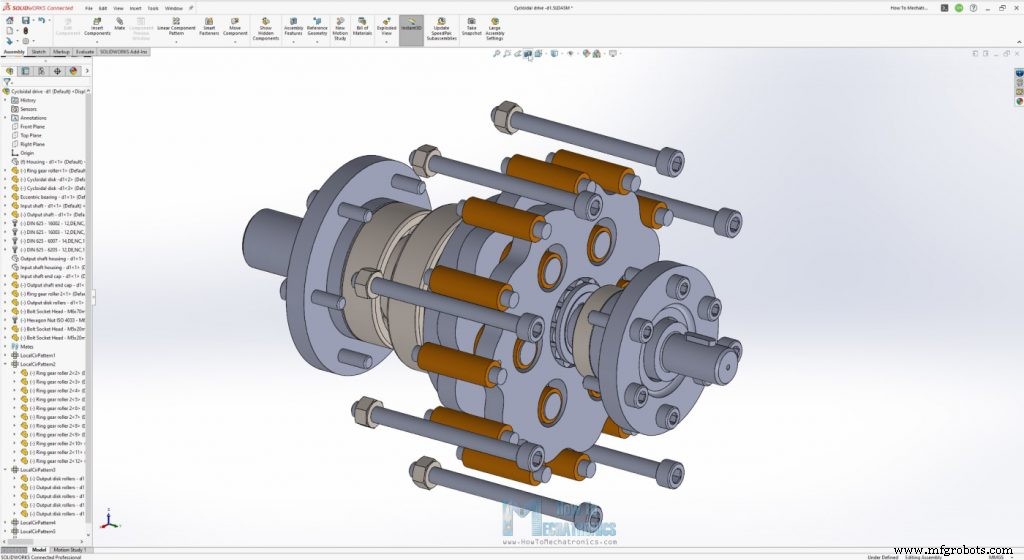
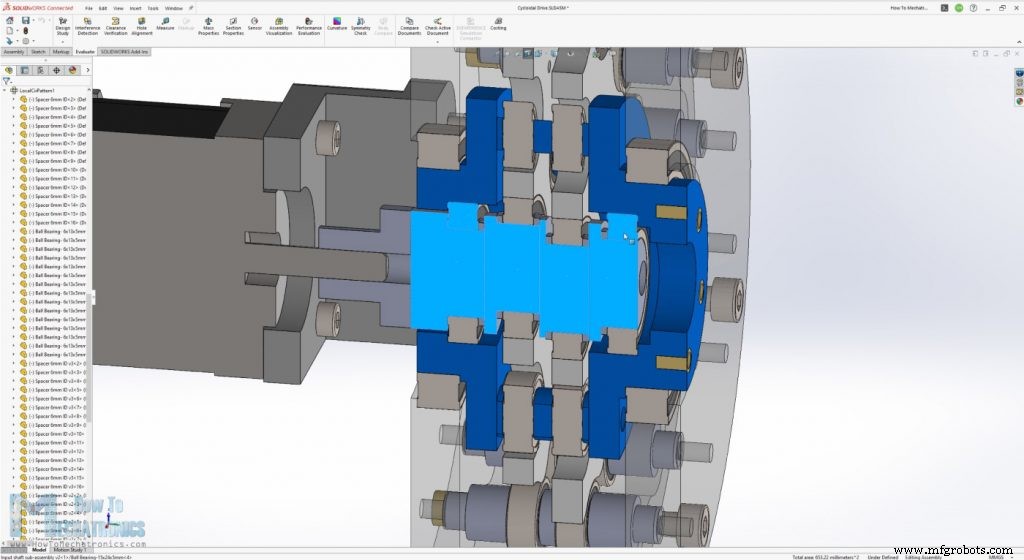
サイクロイドドライブの主なパラメータが定義されたので、残りはすべてがどのように接続されるかについての技術的な解決策を見つけるだけです。繰り返しになりますが、あまり強力ではない3D印刷材料を使用していることを考慮して、ローラーのシャフトは、入力シャフトと出力シャフトだけでなく、両側でサポートされるように設計しました。
入力シャフトはいくつかのセクションで構成され、出力シャフト内の2つのベアリングでサポートされています。出力シャフトも、ハウジング内の2つのベアリングでサポートされています。
したがって、このギアボックスの作業を要約すると、モーターからの入力は、ギアリングの周りのサイクロイドディスクを駆動する偏心入力シャフトに送信されます。
生成された逆方向の動きは、出力シャフトローラーを介して出力シャフトに伝達されます。以上です。3D印刷して、実際にどのように機能するかを見てみましょう。
パーツを3D印刷するときは、スライスソフトウェアで穴の水平方向の拡張機能を使用することが重要です。
通常、3D印刷されたパーツの穴は元のサイズよりも小さいため、この機能を使用してそれを構成し、このパーツにとって非常に重要な正確な寸法を取得できます。私は自分の物を0.07mmに設定し、部品の外寸を補正する水平方向の拡張も0.02mmに設定しました。もちろん、3Dプリンターで最良の結果が得られる値を確認するために、いくつかのテスト印刷を行う必要があります。
それで、ここにすべての3D印刷された部品と、サイクロイドドライブを組み立てるために必要なベアリングとボルトがあります。
このサイクロイドドライブを組み立てるために必要なすべてのコンポーネントのリストは次のとおりです。
リングギアピンをハウジングに挿入することから始めました。これらのピンはリングギアローラーまたはベアリングに対応しますが、直径はわずか6mmです。サイクロイドディスクの負荷で壊れないほど強力かどうかはわかりませんでした。
そこで、中空にして、敷設していた3mmの金属シャフトを挿入しました。このようにして、ピンは確実に十分に強くなります。もちろん、これにはもっと賢い解決策があります。たとえば、代わりにM6ボルトを使用することもできますが、M6ボルトが6mmより少し小さいため、ベアリングがぐらつくのが気に入らないのです。理想的には、ここでは適切な6mmロッドを使用できます。これは、この特定のサイズの35mmでも実際に簡単に購入できます。
すべてのピンを配置したら、7mmの距離リング、ベアリング、3mmの距離リング、ベアリング、さらに7mmの距離リングの順にベアリングを挿入できます。
これで、サイクロイドドライブが作成したこのリングギアに収まるはずです。回転させながらディスクを横に押すことで、ディスクを偏心運動で動かそうとすると、ディスクが逆回転し始めます。
次に、4つのセクションで構成される入力シャフトを組み立てることができます。各セクションにベアリングといくつかのディスタンスリングを配置する必要がありますが、偏心のため、シャフトがセクションで作成されていない限り、それを行うことはできません。
セクションを接続するために、すべてを貫通する2本のM3ボルトを使用しています。ここで、これらのM3ボルトの穴は、M3ボルトよりもわずかに小さくなっているため、ボルトがねじを締めてぴったりとはまります。
組み立てたときのシャフトは次のようになりますが、実際にはサイクロイドディスクを挿入する必要があり、今は挿入できませんでした。そこで、ディスクを挿入した状態で分解して再組み立てしました。
出力軸の組み立てを続けました。ここでは、出力ローラーまたはベアリングを取り付ける必要があります。これは、リングギアローラーの場合と同様の方法で行います。 6mmのピン、13mmのベアリングと、20mmの長さのM3ボルトに挿入されたいくつかのディスタンスリング。
これらの出力ローラーをサイクロイドディスクの開口部に挿入するときは、2つのディスクを互いに180度位相をずらして配置することが重要です。これを支援するために、両方のディスクに180度位相がずれた小さな穴を開けたので、ここではそれらを一致させる必要があり、ローラーを挿入するのに適しています。
これは少しタイトフィットですが、穴の寸法が正確であれば、フィットさせることができます。
これで、これらのピンを反対側のもう一方のフランジに固定できますが、そのためには、最初にいくつかのねじ山付きインサートをフランジに取り付ける必要があります。アセンブリ全体をよりコンパクトにするために、これらのねじ山インサートを使用しています。
したがって、入力シャフトと出力シャフトが一緒に組み立てられると、このアセンブリ全体を外径47mmのベアリングを介してハウジングに取り付けることができます。
次に、このようなベアリングをシャフトの前にもう1つ取り付け、ハウジングのふたを所定の位置に挿入します。 16本のピンすべてがハウジングの蓋スロットに収まる必要があるため、これもぴったりとはまります。そのため、少し力を入れて挿入する必要があります。
ハウジングの裏側に、M4ネジ山インサートをいくつか取り付けてから、蓋とハウジングを40mmのM4ボルトで固定しました。
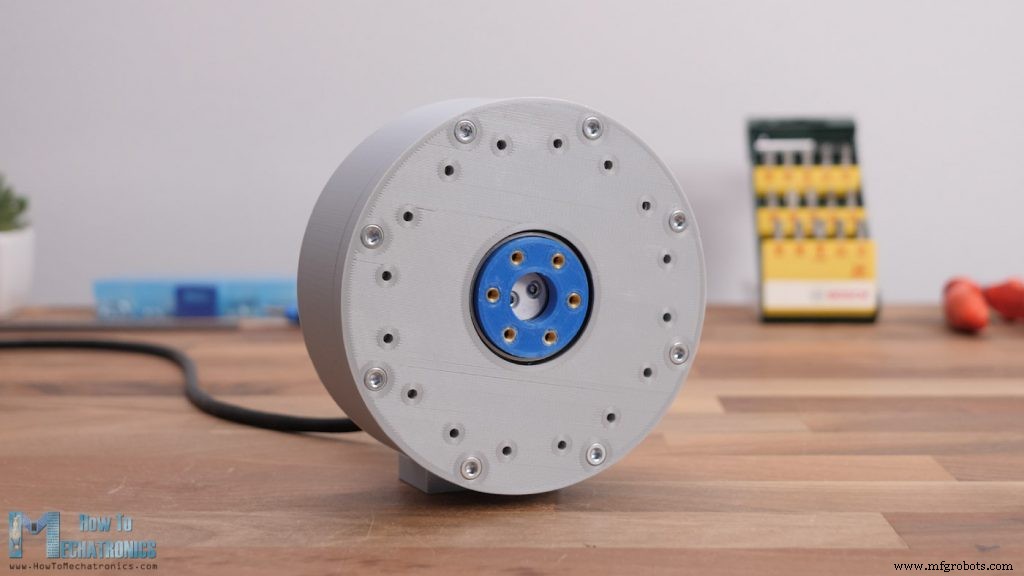
以上です!言うまでもなく、この美しさを見てください。このサイクロイドギアボックスがどのようになったか、何も飛び出さないすっきりとしたデザインが本当に気に入っています。
それでも、モーターを取り付けて、どのように機能するかを見てみましょう。入力シャフトの裏側に、さまざまなシャフトカプラーを簡単に取り付けることができるように、ネジ山付きインサートをいくつか取り付けました。
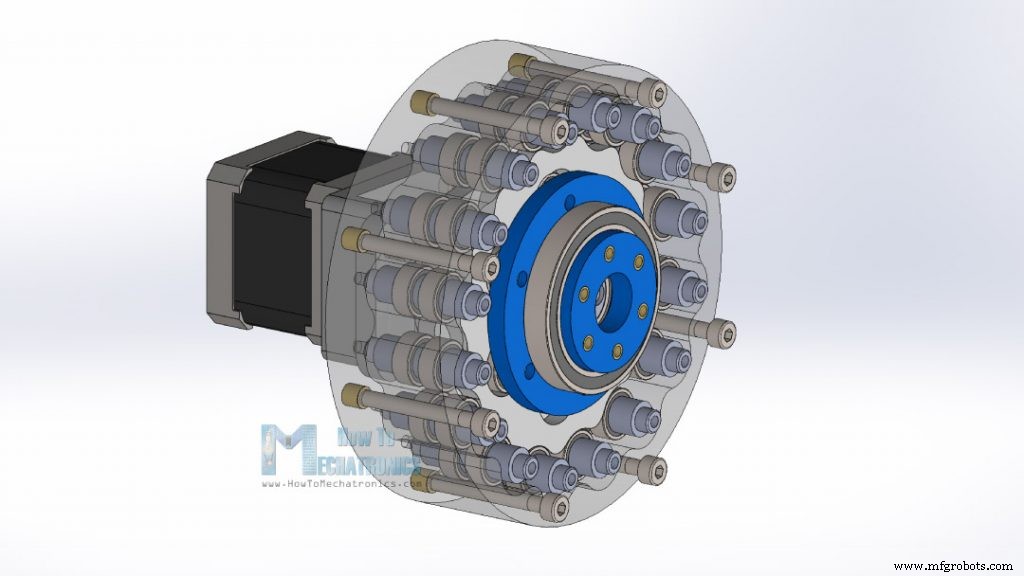
ギアボックスのテストには、NEMA 17ステッピングモーターを使用するため、適切な3Dプリントシャフトカプラーを入力シャフトに取り付けました。ステッパーを3D印刷された取り付けブラケットに固定し、モーターシャフトをカプラーに挿入し、取り付けブラケットをハウジングに固定しました。
最後に、出力シャフトの前にネジ山付きインサートを取り付けて、物を取り付けることができるようにします。これが、NEMA 17ステッピングモーターと組み合わせたこのサイクロイドドライブの最終的な外観ですが、もちろん、ここでは他のタイプのモーターを使用できます。
そして、そこにあります。正直なところ、このギアボックスの出力がいかにスムーズであるかに本当に驚きました。正面から見ると、入力シャフトと出力シャフトの両方が同時に、反対方向に、15:1の速度差で回転しているのがわかります。
前蓋なしでギアボックスを動かすこともできたので、前に説明したすべての動作を見ることができます。
動きは単に魅惑的です。
最後に、ギアボックスのパフォーマンスを確認するためにいくつかのテストを行いました。ここでもう1つ注意すべき点は、このサイクロイドドライブもバックドライブ可能であり、一部のアプリケーションに適した機能である可能性があることです。
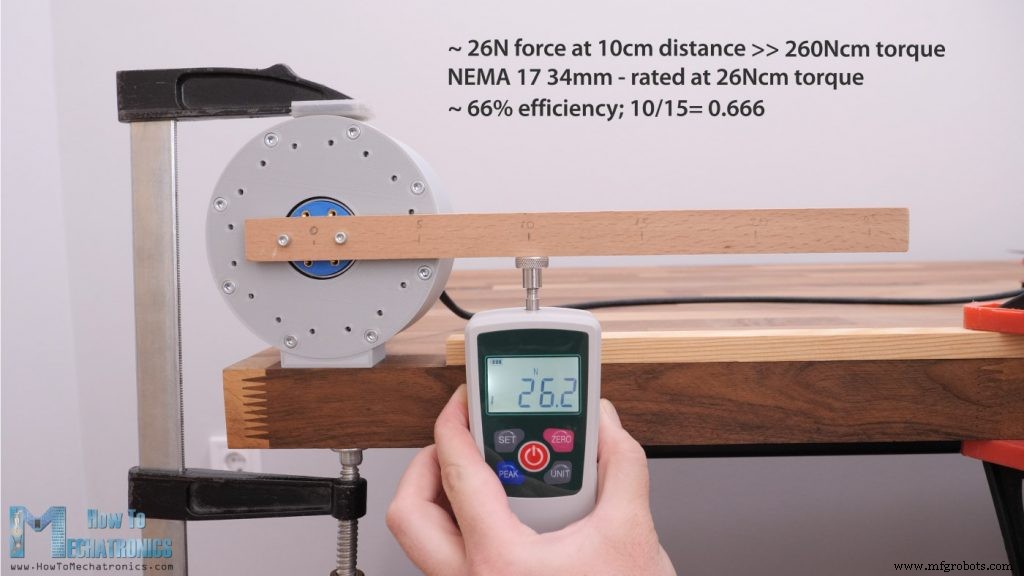
そこで、ここでは、このギアボックスが10cmの距離で生成できる力を測定しています。トルクに換算すると約26Nの読み取り値が得られました。これは約260Ncmで、長さわずか34mmのこのNEMA17ステッパーの定格は26Ncmです。
これは、サイクロイドドライブで約10倍のトルク増加があることを意味します。減速比が15:1であり、理想的な条件では15倍のトルク増加が必要であることを考慮すると、これは約66%の効率です。それでも、すべてが手頃な3Dプリンターで3D印刷され、すべての金属製ギアボックスの場合に一部のプロプリンターやCNCマシンで得られるような精度ではないことを考えると、それでも素晴らしい結果です。
また、いくつかの精度テストを行いましたが、これも良好な結果を示しました。
ロボットプロジェクトを作成するときは、今後のビデオでこのタイプのギアボックスを使用することは間違いありません。
このビデオを楽しんで、何か新しいことを学んだことを願っています。ご不明な点がございましたら、下のコメントセクションでお気軽にお問い合わせください。サイクロイドドライブとは何ですか?
サイクロイドドライブの設計方法
DIYサイクロイドドライブ3Dモデル
設計
N - Number of rollers
Rr - Radius of the roller
R - Radius of the rollers PCD (Pitch Circle Diamater)
E - Eccentricity - offset from input shaft to a cycloidal disk
x = (R*cos(t))-(Rr*cos(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))-(E*cos(N*t))
y = (-R*sin(t))+(Rr*sin(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))+(E*sin(N*t))
===================
Values for this DIY Cycloidal Drive:
N = 16
Rr = 6.5
R = 45
E = 1.5
x = (45*cos(t))-(6.5*cos(t+arctan(sin((1-16)*t)/((45/(1.5*16))-cos((1-16)*t)))))-(1.5*cos(16*t))
y = (-45*sin(t))+(6.5*sin(t+arctan(sin((1-16)*t)/((45/(1.5*16))-cos((1-16)*t)))))+(1.5*sin(16*t))
Code language: Arduino (arduino)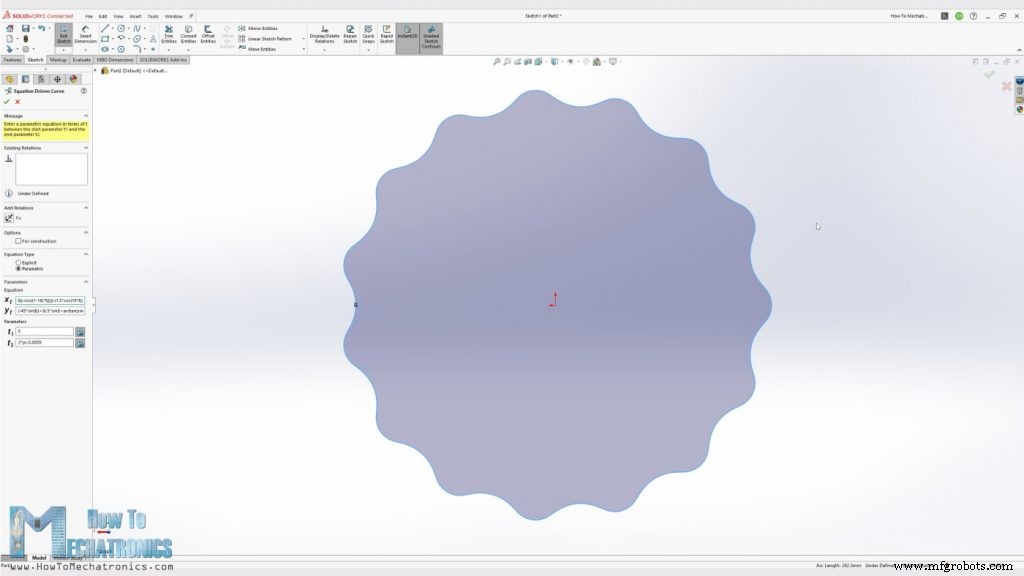
3Dプリント

サイクロイドギアボックスの組み立て













サイクロイドドライブのテスト




産業技術