


SunGlass-BOT [自動サングラス]
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
光の強さを自動的に検出し、黒い色合いを開閉するサングラス。
だから、これからは目を気にする必要はありません。代わりに、このメガネは自動的に目を保護し、暗い場所でも見やすいようにシェードを開くためにあります。
このロボットは、Arduinoといくつかの基本的な部品を使用して作られています。かっこいいですね。
更新:このロボットは、HAckSpaceMagazineのトッププロジェクトとして取り上げられました https://hackspace.raspberrypi.org/issues/9
ステップ1:パーツ <図>

<図>

<図>

- 1x Arduino Pro Mini(5v 16 MHz)
- 1xマイクロサーボモーター(どのモデルでも問題ありませんが、小型である必要があります)
- 1x LDR(光依存抵抗)
- 1x10kオーム抵抗
- サングラス
プログラミングには、USBからTTlへのコンバーターまたはArduinoUnoが必要です。 Unoを使用してコードをアップロードします。
ステップ2:原則
分圧回路を作り、Arduinoに接続します。これで、LDRは可変抵抗器であり、その抵抗値は光の強度に応じて変化することがわかりました。抵抗器は10kなので、値は0〜1023の間になります。明るいまたは中程度の太陽光がある場合、値は100未満になります。室内光の場合、値は500〜600程度になります。暗くて、量は1023になります。わかりましたよね?先に進みましょう!
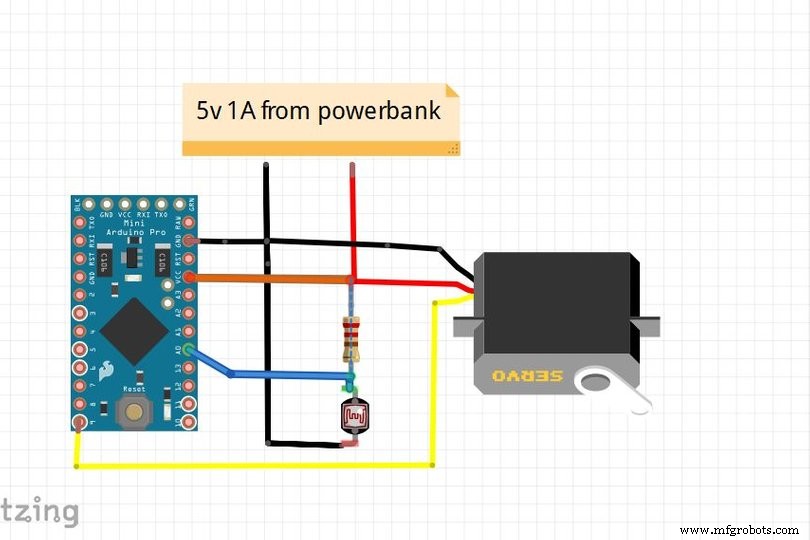
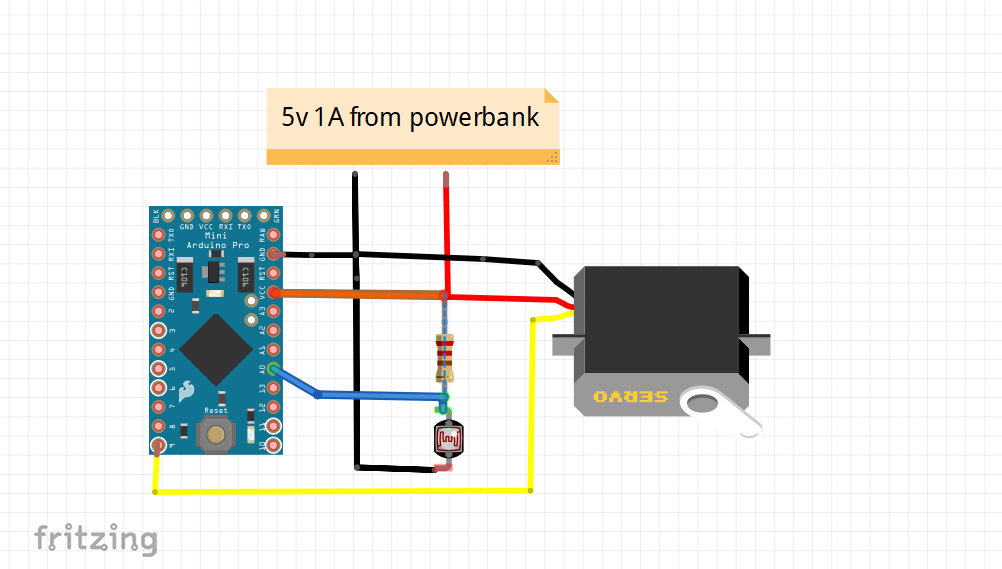
ステップ3:サーキット <図>
<図>

<図>

回路は構築するのに十分単純です。ブレッドボードでテストしてから、Arduino ProMiniにはんだ付けしました。 LDRは光を検出する必要があるため、LDR用のスペースを確保してください。
ステップ4:Arduino ProMiniのプログラミング <図>
<図>
ご覧のとおり、ProMiniにはUSBプログラミングオプションがありません。 USBからTTLへのコンバーターを使用するか、ArduinoUnoを使用してください。結局のところ、私たちは皆宇野を持っていますよね?では、なぜお金を無駄にするのですか?
ドライバーを使用してATmega328PICをArduinoUnoから取り外すだけで、持ち上げることができます。次に、次のようにピンを接続します。
- UNO -------- Pro mini
- 5v --------------- vcc
- Gnd ------------ Gnd
- tx ---------------- tx
- rx ---------------- rx
- リセット-----------最初
あなたはそうするためにビデオを見るかもしれません(言語が異なります):
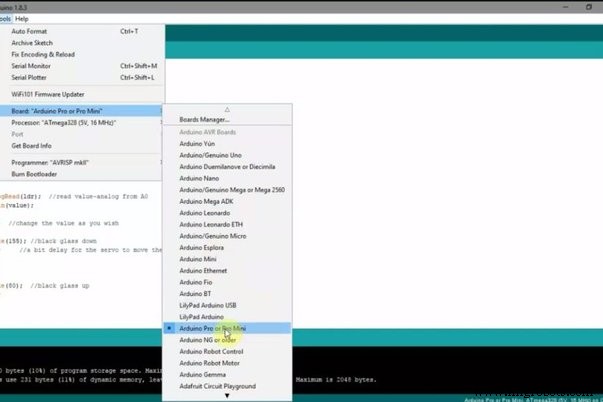
それでおしまい!次に、Arduino Uno USBケーブルを接続し、PCまたはAndroidに接続してコードをアップロードします。アップロードする前に、[ツール]> [ボードタイプ]> [Arduino Pro Mini]を選択します(この場合は、適切なプロセッサ5V 16 MHzも選択します)。写真をご覧ください。
次に、コードをアップロードします。
コードリンク:https://github.com/ashraf-minhaj/SunGlass-Bot-Auto ...
// * SunGlass-自動サングラスをashrafminhajでボットします。//YouTubeの完全なチュートリアル:www.youtube.com/c/fusebatti//必要に応じて[email protected]#include サーボサングラス; //サーボ名intldr =0; // LDRをA0intに接続しますvalue =0; //値を定義します0voidsetup(){Serial.begin(9600); //これは必須ではありませんが、pcに値を表示するためにsglass.attach(9); //接続するサーボをどのピンに宣言するか} void loop(){value =analogRead(ldr); // A0から値アナログを読み取りますSerial.println(value); delay(100); if(value <100)//必要に応じて値を変更します{sglass.write(155); //黒いガラスのダウンdelay(100); //サーボがそこに移動するためのビット遅延} else {sglass.write(80); //黒いガラスアップdelay(100); }} それをアップロードして、それがどのように機能するかを見てください!
ステップ5:サングラスを準備する <図>

<図>

<図>

<図>

強く押して黒いメガネを外し、このように硬いワイヤーに接着します。次に、サーボを取り付け、サーボアームを追加して、作成した追加のガラスフレームに接着します。 5V1A電源を使用して電源を入れることができます。自家製のパワーバンクを使用します。
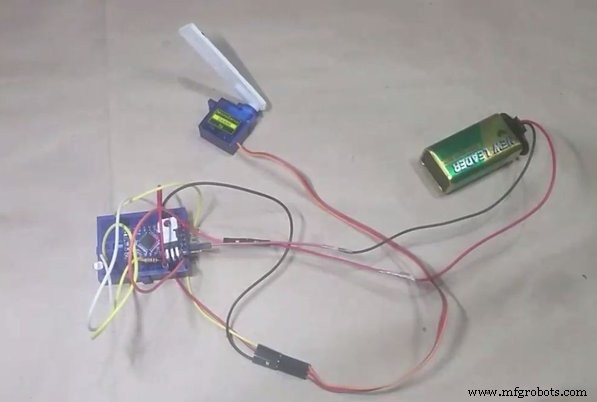
ステップ6:完了! <図>

<図>

回路の電源を入れると、Arduinoが点灯するはずです。さあ、外に出て、この奇妙に見えるが素晴らしいサングラスロボットを楽しんでください!
コード
- subglass-bot.code.c
subglass-bot.code.c C / C ++
// * SunGlass-ashraf minhajによる自動サングラスのボット.//YouTubeの完全なチュートリアル:www.youtube.com/c/fusebatti//必要に応じて[email protected]#includeServoサングラス; //サーボ名intldr =0; // LDRをA0intに接続しますvalue =0; //値を定義します0voidsetup(){Serial.begin(9600); //これは必須ではありませんが、pcに値を表示するためにsglass.attach(9); //接続するサーボをどのピンに宣言するか} void loop(){value =analogRead(ldr); // A0から値アナログを読み取りますSerial.println(value); delay(100); if(value <100)//必要に応じて値を変更します{sglass.write(155); //黒いガラスのダウンdelay(100); //サーボがそこに移動するためのビット遅延} else {sglass.write(80); //黒いガラスアップdelay(100); }}
sunglass-bot.code
https://github.com/ashraf-minhaj/SunGlass-Bot-Automatic-SunGlass-Robot- 回路図
製造プロセス