


Arduino3Dプリントロボットアーム
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 |
必要なツールとマシン
>  |
| |||
 |
|
アプリとオンラインサービス
>  |
|
このプロジェクトについて
このプロジェクトは4個を使用します。 Arduinoボードを搭載した安価なSSG90サーボモーター。 3D印刷用の.stlファイルは、以下のリンクから、または直接ThingiverseWebにダウンロードできます。
https://www.thingiverse.com/thing:1015238
このロボットアームを作成するためのより詳細な手順を見つけることができます。
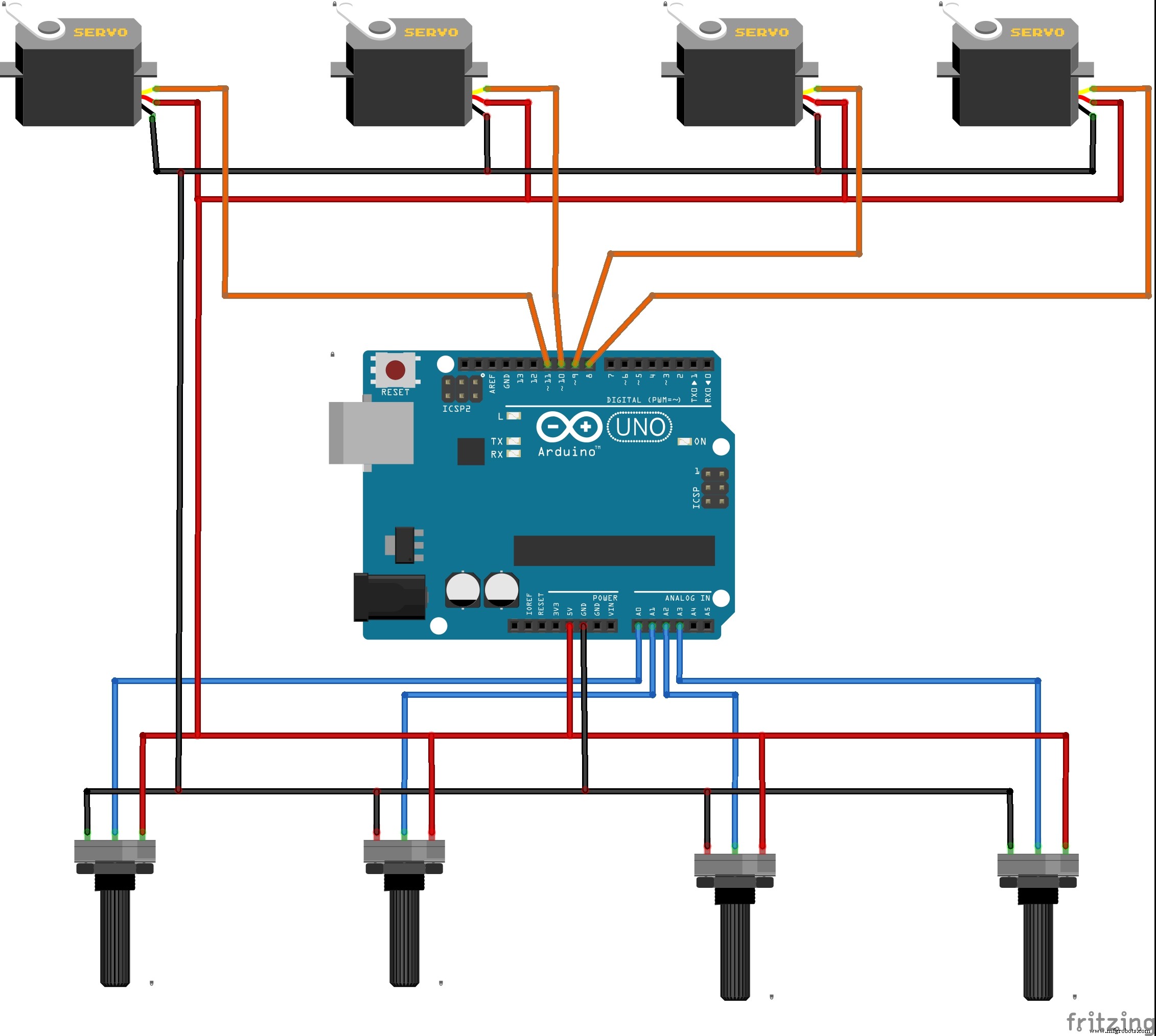
前述のように、サーボモーターはArduinoボードから駆動されます。この目的のために、各サーボが適切なポテンショメータによって制御されるように、簡単なコードも作成しました。ちょっとした運動の後、ビデオで見ることができるように、ポテンショメータを使用した取り扱いは非常に簡単で興味深いものになります。
将来的には、完全な産業用ロボットを取得するサーボモーターの特定の動きをキャプチャして自動的に実行するオプションを使用して、コードを拡張しようとしています。
回路図は下の写真で見ることができます。
コード
- コード
コード Arduino
#includeServo myservo; //サーボを制御するサーボオブジェクトを作成しますServomyservo1; Servo myservo2; Servo myservo3; int potpin =0; //ポテンショメータの接続に使用されるアナログピンintpotpin1 =1; int potpin2 =2; int potpin3 =3; int val; //アナログから値を読み取る変数pinintval1; int val2; int val3; void setup(){myservo.attach(8); //ピン8のサーボをサーボオブジェクトに接続しますmyservo.attach(9); myservo.attach(10); myservo.attach(11);} void loop(){val =analogRead(potpin); //ポテンショメータの値(0から1023までの値)を読み取りますval =map(val、0、1023、0、180); //サーボ(0から180の間の値)で使用するようにスケーリングしますmyservo.write(val); //スケーリングされた値delay(15);に従ってサーボ位置を設定します。 //サーボがそこに到達するのを待ちますval1 =analogRead(potpin1); val1 =map(val1、0、1023、0、180); myservo1.write(val1); delay(15); val2 =analogRead(potpin2); val2 =map(val2、0、1023、0、180); myservo2.write(val2); delay(15); val3 =analogRead(potpin3); val2 =map(val3、0、1023、0、180); myservo3.write(val3); delay(15); }
カスタムパーツとエンクロージャー
eezybotarm_uVD6bjbxQi.zip 回路図
製造プロセス