arduinoを使用したソナーと処理IDEでの表示
コンポーネントと消耗品
アプリとオンラインサービス
>  | | |
 | | |
このプロジェクトについて
みなさん、こんにちは。障害物回避車を作るように言われましたが、あまりにも一般的で実用的ではないと思ったので、障害物回避車のサーボとHC-SR04センサーのコンセプトでソナーを作ろうと思いました。
ソナーの出力を表示する方法がわからなかったため、tft液晶画面がありませんでした。それから、ソナーの出力をPCに表示できるようになっているので、処理IDEを使用することを考えました。しかし、IDEの処理に慣れていないので、IDEを使用することを知らなかったので、練習にはp5 Webエディターを使用しました(練習用)。Ideといくつかのライブラリの処理を使用してソナーの出力を読み取り、PCに表示しました!
>
<図> 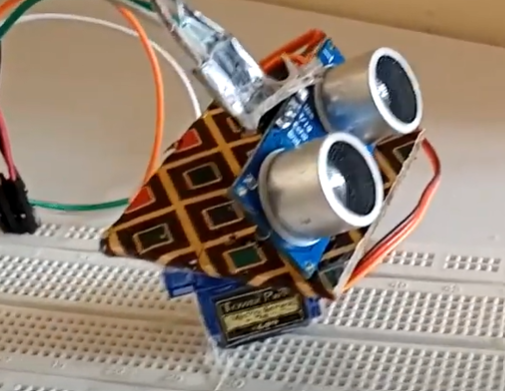
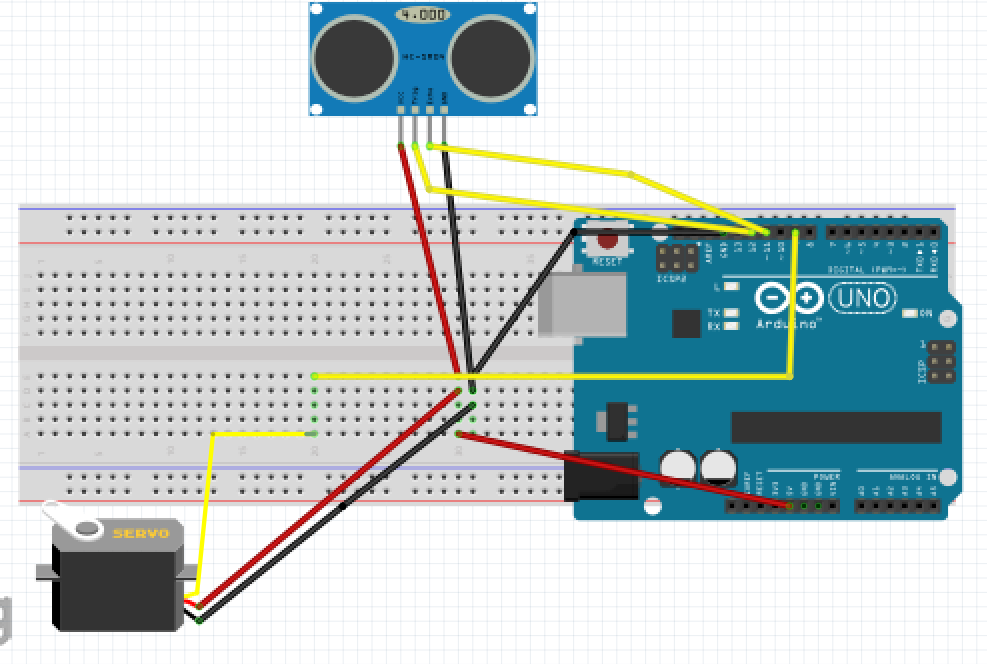
超音波センサーをサーボで回転させて180度の範囲をカバーするようにホットグルーガンを使用してサーボモーターに超音波センサーを取り付け、物体が検出されたかどうかの出力が処理IDEに表示され、さらにコードを記述しました。距離と角度を正確に表示します!
<図> 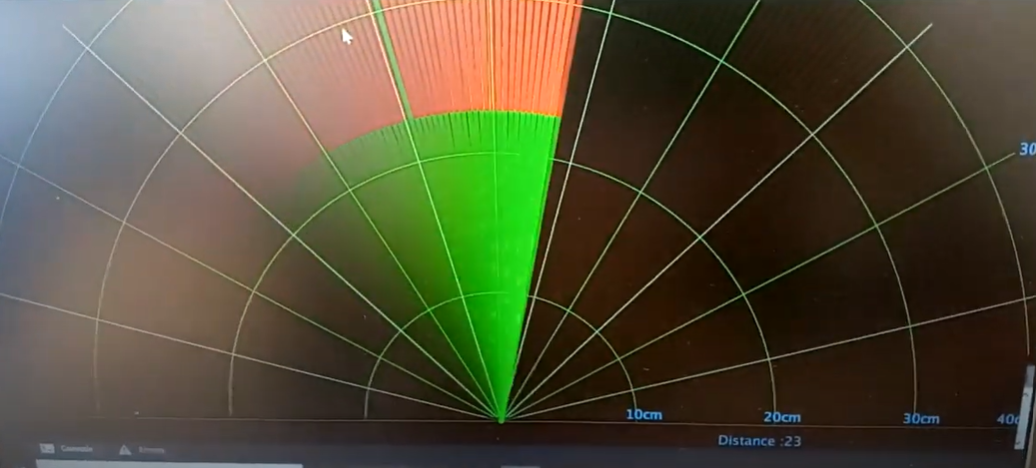
友人私はまた、IDEの処理での出力が、プロジェクトの参照として画像を使用できるように見えることを共有しました:)
アセンブリと出力がどのように見えるかを知っているので、残っているのは出力のビデオだけです。出力をより適切に理解するために、最後までビデオを見てください。
コード
- arduinoIDEのソナーコード
- IDEを処理するためのソナーコード
arduinoIDEのソナーコード C / C ++
#include const int trigPin =12; const int echoPin =11; long duration; int distance; Servo s1; void setup(){Serial.begin(9600); pinMode(trigPin、OUTPUT); pinMode(echoPin、INPUT); s1.attach(9);} void loop(){for(int i =0; i <180; i =i + 1){s1.write(i); delay(30);距離=calDist(); Serial.print(i); Serial.print( "、"); Serial.print(距離); Serial.print( "。"); } for(int i =180; i> 0; i =i-1){s1.write(i); delay(30);距離=calDist(); Serial.print(i); Serial.print( "、"); Serial.print(距離); Serial.print( "。"); }} int calDist(){digitalWrite(trigPin、LOW); delayMicroseconds(2); digitalWrite(trigPin、HIGH); delayMicroseconds(10); digitalWrite(trigPin、LOW);期間=pulseIn(echoPin、HIGH);距離=期間* 0.034 / 2;戻り距離;}
IDE Java を処理するためのソナーコード
importprocessing.serial。*;シリアルmyPort; String ang =""; String distance =""; String data =""; int angle、dist; void setup(){size(2000,800); myPort =new Serial(this、 "COM3"、9600); myPort.bufferUntil( '。'); background(0);} void draw(){fill(0,5); noStroke(); rect(0、0、width、height * 0.93); noStroke(); fill(0,255); rect(0、height * 0.93、width、height); drawRadar(); drawLine(); drawObject(); drawText();} void serialEvent(Serial myPort){data =myPort.readStringUntil( '。'); data =data.substring(0、data.length()-1); int index1 =data.indexOf( "、"); ang =data.substring(0、index1); distance =data.substring(index1 + 1、data.length());角度=int(ang); dist =int(distance); System.out.println(angle);} void drawRadar(){pushMatrix(); noFill(); strokeWeight(0.5);ストローク(10,255,10); translate(width / 2、height-height * 0.06); line(-width / 2,0、width / 2,0); arc(0,0、(width * 0.5)、(width * 0.5)、PI、TWO_PI); arc(0,0、(width * 0.25)、(width * 0.25)、PI、TWO_PI); arc(0,0、(width * 0.75)、(width * 0.75)、PI、TWO_PI); arc(0,0、(width * 0.95)、(width * 0.95)、PI、TWO_PI); line(0,0、(-width / 2)* cos(radians(30))、(-width / 2)* sin(radians(30))); line(0,0、(-width / 2)* cos(radians(60))、(-width / 2)* sin(radians(60))); line(0,0、(-width / 2)* cos(radians(90))、(-width / 2)* sin(radians(90))); line(0,0、(-width / 2)* cos(radians(120))、(-width / 2)* sin(radians(120))); line(0,0、(-width / 2)* cos(radians(150))、(-width / 2)* sin(radians(150)));ストローク(175,255,175); line(0,0、(-width / 2)* cos(radians(15))、(-width / 2)* sin(radians(15))); line(0,0、(-width / 2)* cos(radians(45))、(-width / 2)* sin(radians(45))); line(0,0、(-width / 2)* cos(radians(75))、(-width / 2)* sin(radians(75))); line(0,0、(-width / 2)* cos(radians(105))、(-width / 2)* sin(radians(105))); line(0,0、(-width / 2)* cos(radians(135))、(-width / 2)* sin(radians(135))); line(0,0、(-width / 2)* cos(radians(165))、(-width / 2)* sin(radians(165))); popMatrix();} void drawLine(){pushMatrix(); strokeWeight(9);ストローク(0,255,0); translate(width / 2、height-height * 0.06); line(0,0、(width / 2)* cos(radians(angle))、(-width / 2)* sin(radians(angle))); popMatrix();} void drawObject(){pushMatrix(); strokeWeight(9);ストローク(255,0,0); translate(width / 2、height-height * 0.06); float pixleDist =(dist / 40.0)*(width / 2.0); float pd =(width / 2)-pixleDist; float x =-pixleDist * cos(radians(angle)); float y =-pixleDist * sin(radians(angle)); if(dist <=40){line(-x、y、-x +(pd * cos(radians(angle)))、y-(pd * sin(radians(angle)))); } popMatrix();} void drawText(){pushMatrix(); fill(100,200,255); textSize(25); text( "10cm"、(width / 2)+(width * 0.115)、height * 0.93); text( "20cm"、(width / 2)+(width * 0.24)、height * 0.93); text( "30cm"、(width / 2)+(width * 0.365)、height * 0.93); text( "40cm"、(width / 2)+(width * 0.45)、height * 0.93); if(dist <=40){text( "Distance:" + dist、width * 0.7、height * 0.99); } translate(width / 2、height-height * 0.06); textSize(25); text( "30"、(width / 2)* cos(radians(30))、(-width / 2)* sin(radians(30))); text( "60"、(width / 2)* cos(radians(60))、(-width / 2)* sin(radians(60))); text( "90"、(width / 2)* cos(radians(91))、(-width / 2)* sin(radians(90))); text( "120"、(width / 2)* cos(radians(123))、(-width / 2)* sin(radians(118))); text( "150"、(width / 2)* cos(radians(160))、(-width / 2)* sin(radians(150))); popMatrix(); } 回路図