


数独ソルバーロボット
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
必要なツールとマシン
>  |
|
アプリとオンラインサービス
>  |
| |||
 |
| |||
|
このプロジェクトについて
数独のグリッドを一人で解いて埋めるロボット!
数独は、いくつかの単純な数学的規則に従うため、コンピューターが自動的に解くことができるデジタルパズルです。
<図> <図>
<図> 
このプロジェクトの主な目的は、3Dプリンターのアイデアに基づいてテーブルをプロットするなど、基本的で自律的なロボットを構築することでした。これにより、次のことが可能になります。
- 数独のグリッドを分析して塗りつぶします
- 数独の問題を解決する
- グリッドを埋める
つまり、ロボットは、すでに入力されているボックスとその値を検出して、次のように入力されたグリッドのように入力に進むために、解決するグリッドを処理できる必要があります。
使い方?
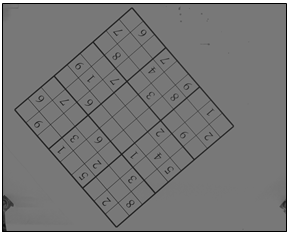
ロボットのハードウェアは、カメラでRaspberry Pi3を使用することで構成されています。グリッドの写真は、プロセスの開始時に撮影されます。
<図>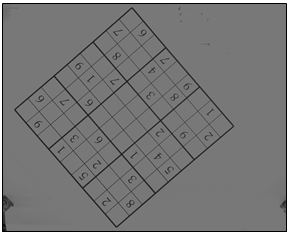 <図>
<図> 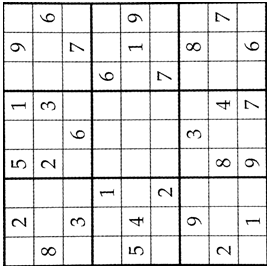 <図>
<図> 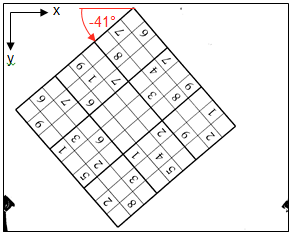
次に、画像処理方法を使用してグリッドを前処理し、アーチファクトを抑制します。次に、グリッドのみに焦点を合わせた画像を取得するための救済策です。
数独グリッドが取得されたら、グリッドをセグメント化して各ボックスを抽出し、ニューラルネットワークを使用した画像認識に進みます。このプロセスの最後に、グリッドの数値表現があり、それを解くことができます。
解決したら、ラズベリーパイを再び使用して、グリッドを埋めるためにロボットのモーターを制御します。
要約すると、
<図>
- 1-グリッドを修正する
- 2-グリッドの等高線を推定します
- 3-(1に2を掛けて)輪郭を強調します
- 4-グリッドをセグメント化してボックスを抽出します
- 5-画像認識に進みます
結果
必要なスキル
- コンピュータビジョン
- 画像処理
- プログラミングスキル
- 電子
- 機械的
便利なツールとAPI
- Python
- ニューラルネットワークのテンソルフロー
- 画像処理用のopencv
参照
- https://en.wikipedia.org/wiki/Sudoku
- https://github.com/Sanahm/TensorFlow-Tutorials
プロジェクトの詳細については、Githubで私に連絡することを躊躇しないでください。
コード
Github
https://github.com/Sanahm/Sudoku-robothttps://github.com/Sanahm/Sudoku-robot製造プロセス