


Raspberry Pi ロボット:Raspberry Pi ロボットの作成方法
ラズベリーパイ
Raspberry Pi ロボットを作成するのは難しくて複雑だと思いますか?それなら、あなたは正しい場所にいます.
実際、ロボットに Pi ボードを使用すると、手頃な価格で完全なコンピューターを入手できます。したがって、これをその小さなフォーム ファクターと広範なコミュニティ サポートと組み合わせると、初心者でも素晴らしいボードになります.
ただし、ロボット工学の世界に飛び込むということは、より高度な回路設計に飛び込むことを意味します。しかし、心配しないでください。できる限り簡単にします。 https://www.wellpcb.com/
そのため、この記事では、Raspberry Pi ロボットの作成方法と、作成できるさまざまな Pi ロボット プロジェクトについて説明します。
Raspberry Pi ロボットの作成方法
ここでは、障害物を避けて自由に移動できる初心者向けの Pi ロボットを作成する方法を紹介します。このプロジェクトに必要なパーツは次のとおりです。
- Raspberry Pi (B、B+、または 2 つのモデル)
- ギヤード DC モーター (1)
- キャスターホイール (1)
- SD カード (1)
- マウス (1)
- プッシュボタン (1)
- マウス (1)
- 200R 抵抗器 (1)
- ブレッドボード (1)
- 両面テープ (1)
- キーボード
- L293D ドライバー (1)
- オスからオス、またはメスからメスのジャンパー (1)
- ロボットのシャーシと車輪 (1)
- IR センサー モジュール (1)
プロジェクトのビルド
まず、IR センサーを Raspberry Pi に接続する必要があります。これを行うには、Raspberry Pi をキーボード、マウス、モニターに接続してから装着します。次に、センサーをクリックして、正しく機能していることを確認します。
その後、Piの5VピンとGNDピンをセンサーに接続して電源を供給します。次に、センサーの B ピンをクリックして GPIO ピン 16 と 3 に接続します。最後に、GPIO.BOARD のピン構成を確認します。
次に、次のコードを入力し、Python ファイル (できれば irtest.py) として保存します。
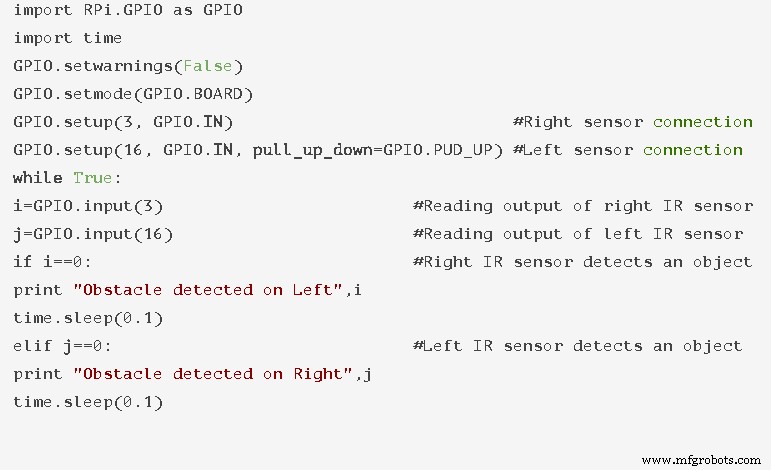
Python ファイルのコード
Python ファイルを保存して実行すると、センサーをブロックすると、次の出力が表示されます。
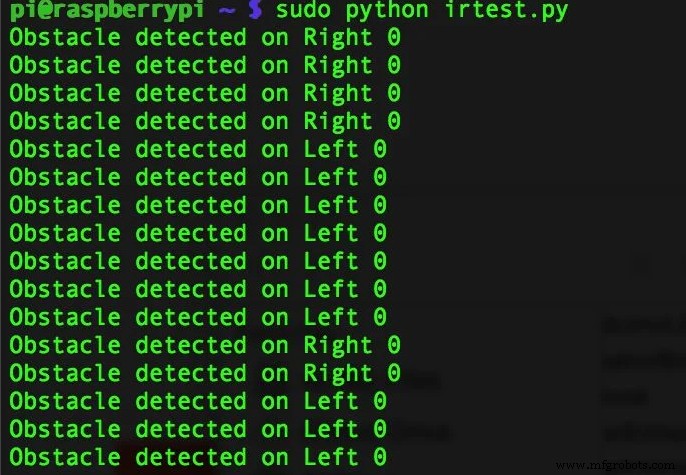
Python ファイルの印刷出力
接続を確認するか、うまくいかない場合はコンポーネントを交換してください。
モーターを L293D に接続
次に、L293D モジュールを使用してモーターを接続します。ただし、まず、+ ピンと – ピンを介して L293D に電源を供給します。また、これらの電源ピンを 9v バッテリーのボードに接続します。
フル サーキット接続
さらに、L293D の – ピンを Pi の GND ピンに接続します。下の図をチェックして、接続を明確に把握してください。
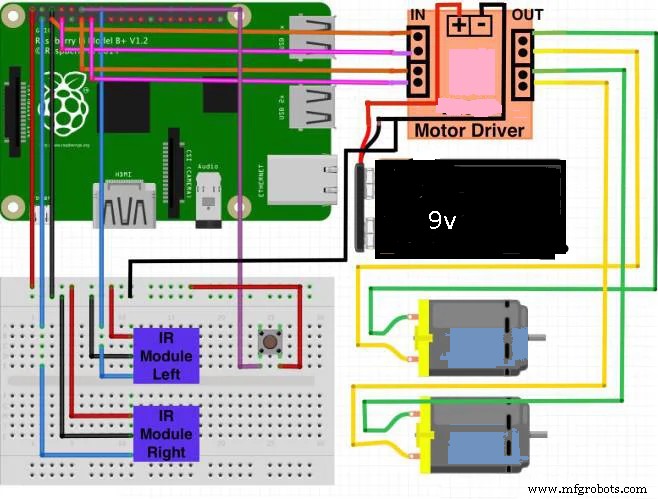
さらに、4 つの出力 GPIO ピンを使用して、ボードの入力を作成します。さらに、これらの出力ピンを使用して、2 つのモーターの回転方向を制御できます。
また、2 つのモーター端子をボードの 4 つの出力端子に接続できます。最後に、最後の接続のためにロボットをアクティブ化または非アクティブ化するためのプッシュ ボタンを取り付けます。
最終建設
これで、モーターにホイールを追加して、ロボット シャーシに接続を組み立てることができます。部品が落ちないように両面テープで固定してください。
以下のコードでモーターをテストすることを忘れないでください。また、必ずコードを Python ファイル moto.py として保存してください。次に、sudo motor.py コマンドを使用してコードを実行します。モーターが動作する場合は、回転を開始する必要があります。
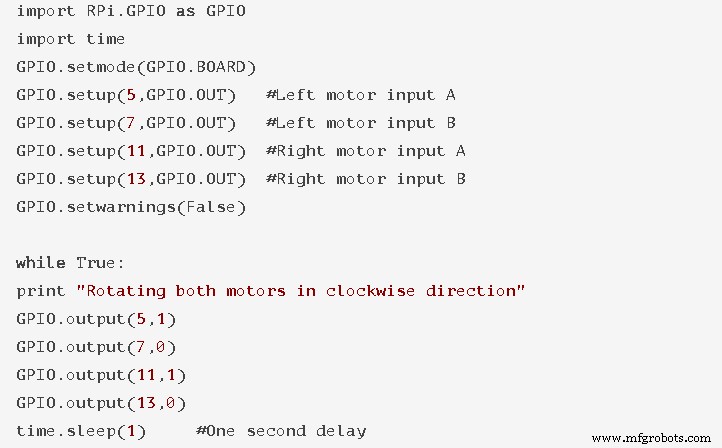
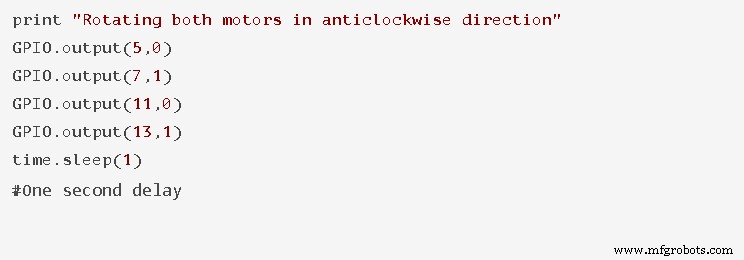
モーターをテストするためのコード
仕組み
プッシュボタンを押すと、ロボットが起動して動き出します。前進している間、ロボットは IR センサーで経路を塞いでいる物体を探します。障害物を検出すると、Pi はロボットが障害物を回避できるようにします。ここでも、ボタンを押すことでロボットを非アクティブ化できます。
Raspberry Pi ロボット プロジェクト
上記の簡単なプロジェクトを完了し、さらに挑戦したい場合は、ここにいくつかの優れたプロジェクトのアイデアを試してみてください。
1. CHOP 四足歩行ロボット

四足歩行ロボットをチョップ
実際、チョップ四足歩行ロボットは、ボストン ダイナミクスのスポットに似た DIY プロジェクトです。さらに、CHOP プロジェクトはオープンソースです。したがって、いくつかの 3D プリント パーツやその他の材料を使用してカスタマイズおよび調整できます。
間違いなく、Raspberry Pi 4B と Arduino Mega がこのロボットの重要なコンポーネントです。また、Arduino はセンサーからのデータをフィルタリングし、サーボ コントローラーに接続します。一方、Pi はすべてのデータを収集し、さまざまな Python スクリプトを実行してロボットの動きを制御します。
さらに、Pi は逆運動学モデルを使用してサーボの動きを制御します。最後に、Bluetooth コントローラーを使用してロボットの方向を制御できます。
2.ピンポン ロボット
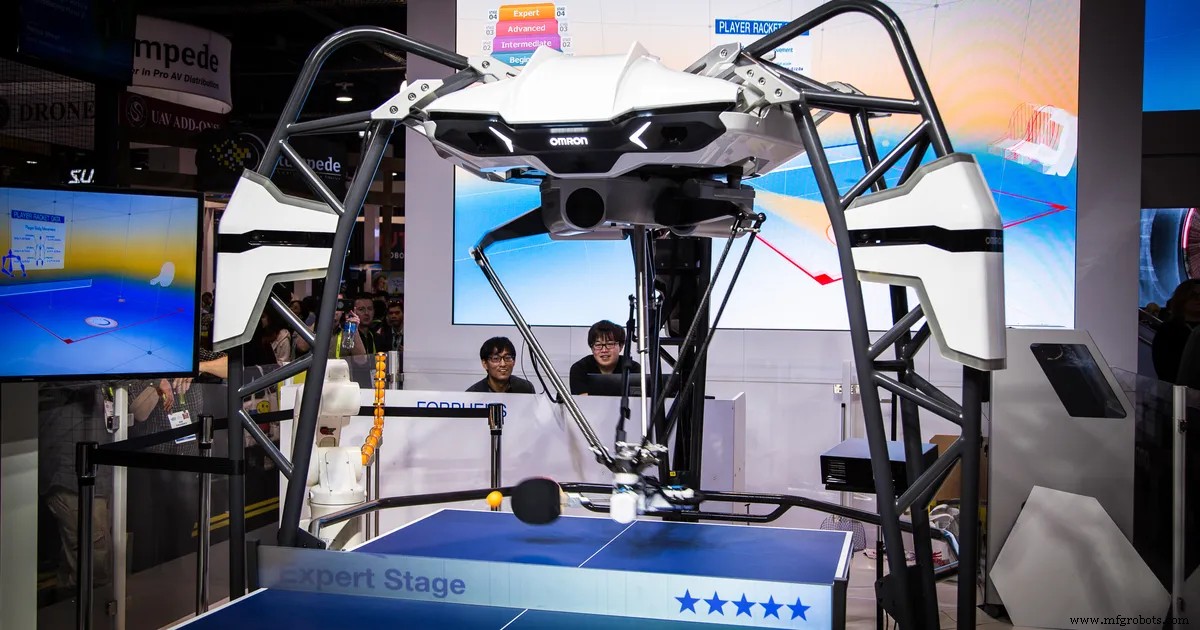
ピンポン ロボット
卓球ロボットは、人間と卓球をすることができます。そして、高度なものから単純なものまで、さまざまなレベルで。
卓球ボットをレジャーゲームや厳しい練習に使用します。ただし、約 2,000 ドルで商用バージョンを購入できます。または、手持ちのパーツ、3D プリント、レーザー カット パーツを使って簡単に DIY バージョンを作成できます。
さらに、WiFi 経由でボットに接続し、完全に制御できます。
3. Raspberry Pi ヒューマノイド ロボット

人型ロボット
Raspberry Pi を使用してヒューマノイド ロボットを作成できます。一部のヒューマノイド ロボットには、障害物回避、超音波距離感知、またはワイヤレス制御機能があります。
機能に関係なく、このプロジェクトには Robotics Bioloid キット、ジャイロスコープ、距離センサーが必要です。
さらに、小型の Raspberry Pi Zero と単セル 2500 Mah のバッテリーを電源に使用することをお勧めします。
さらに、センサーからデータを読み取れるように、A/D コンバーター チップが必要になります。
4.パイ・ルンバ

ルンバ
ロボット工学の経験があれば、ルンバ ロボット掃除機について聞いたことがあるでしょう。
ただし、Raspberry Pi とよりインテリジェントな動きで自分のものを構築できます。
Raspberry Pi に接続するには、ルンバ 530 シリアル インターフェイスが必要です。
さらに、コーディングには Javascript パッケージを使用します。また、ボックスは RxTX を使用してロボットと通信します。
また、ジョイスティックでルンバを操作したり、出力レベルを設定したりすることもできます。
5.バターロボット
インテリジェントバターロボットは、優れた品質でビデオを録画およびストリーミングできます。さらに、音声を録音して出力することもできます。
最良の部分は、Raspberry Pi カメラ モジュールと USB デバイスだけでこれらのサウンドとビデオをキャプチャできることです。
ただし、ロボットのコンポーネントには以下が含まれます:
- Raspberry Pi Zero W
- RPi カメラ モジュール
- DC モーター
- USB オーディオ ボード
- L9110 モーター ドライバー
- 率いる
- バッテリーパック
- 9g サーボ
- スライド スイッチ
- スピーカー
また、ビデオ ストリーミングをサポートする Blynk アプリを通じてこのロボットを使用することもできます。
6. Petoi ロボティック キャット
Nybble オープンソースの機械猫プロジェクトを使用して、愛らしいロボット猫を作成できます。さらに、3D プリント部品の代わりにレーザー カットの木製部品を使用できます。
このプロジェクトのその他のコンポーネントには、Raspberry Pi 3B+、Nybble キット、および Sparkfun Arduino Pro Mini が含まれます。
さらに、このロボットの動きを Arduino 互換のマイクロコントローラーで制御できます。ロボット猫は、筋肉の記憶を保存することもできるため、動き方を覚えることができます。
さらに、このプロジェクトの Raspberry Pi を使用すると、Nybble コードを調整して簡単なコマンドを与えることができます。
7.スポット マイクロ
スポット マイクロは、人気のスポット 4 人乗りロボットの小型バージョンです。さらに、3 軸の「角度指令制御モード」で速歩と歩行が得られます。
ロボットは、Ubuntu を搭載した Raspberry Pi 3B で実行されます。また、C++ および Python フレームワークを使用します。
さらに、このプロジェクトを試すには、次のコンポーネントが必要です:
- Raspberry Pi 3 B
- 15×2 LCD パネル
- PCA9685 サーボボード
- 4000 mah バッテリー
- 5V 電圧レギュレーター
- 3D プリント パーツ
- Lider (ルーム マッピングのオプション)
8.ミニチュア戦闘ロボット
強力な戦闘ロボットを構築しますか?次に、このプロジェクトを試すことができます。 Raspberry Pi Zero を使用すると、Bluetooth コントローラーからの入力をロボットのモーター コントローラーのコマンドに変換できます。
RC 送信機を使用する代わりに、プロジェクトはより単純な GPIO ピン構成を使用します。
移動用の L298N ボード、ブラシレス モーターを回転させるための Tarot TL300G ESC、および 500Mah のバッテリー パックがあれば役に立ちます。そして、3D プリントされたシャーシに乗ったミニ戦闘ロボットを手に入れました。
9. Raspberry Pi デバステーター ロボット

デバステーター ロボット
名前が示すように、Raspberry Pi Zero W でロボット タンクを作成できます。ビルド全体には、3D プリントされたカスタム ブラケット、いくつかの Python コード、およびモーター コントローラー回路が含まれます。マウントされたカメラを追加することもできます。
または、Devastator Tank モバイル プラットフォームでこのプロジェクトに必要なものをすべて見つけることができます。
最後の言葉
Raspberry Pi は、さまざまなアプリケーションに対応する汎用性の高いミニコンピューターです。この記事に記載されている Raspberry Pi ロボット プロジェクトのほとんどは、初心者向けの Python のみを使用しています。
また、プロジェクトに必要なすべてのコンポーネントが見つからない場合は、ロボット キットを試すことができます。自動機器を購入すると、ロボット プロジェクトの詳細がすぐにわかります。
ただし、これらのプロジェクトに挑戦するには、基本または中級のスキルセットが必要です。
何か質問がありますか?お気軽にお問い合わせください。喜んでお手伝いいたします。
産業技術