


Hakko907用はんだごてコントローラー
コンポーネントと消耗品
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| |
| × | 1 | |||
| × | 1 | ||||
| |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
必要なツールとマシン
>  |
|
アプリとオンラインサービス
>  |
|
このプロジェクトについて
免責事項
これは、コントローラーソフトウェアの2番目のリリースです。いくつかのバグが修正され、新しいメニューが実装されました。 これ コントローラー は いいえ 長い サポートされています。 独自の新しいはんだ付けコントローラーを最初から作成する場合は、利用可能な別のバージョンのはんだ付けコントローラーを作成することを強くお勧めします。 ここ 。この記事の最初のリリースに従ってコントローラーをビルドした場合は、コントローラーのファームウェアをアップグレードしてください。 後にもう一度チューニング手順を実行する必要があります。 ファームウェア アップグレード。
まず、アイデアがありました
面白いプロジェクトのためにインターネットをサーフィンしているとき、手作りのはんだ付けステーションプロジェクトは私にとても感動しました。同時に、プロジェクトはそれほど複雑ではなく、十分に文書化されており、非常に有用でした。コントローラーなしで一般的なはんだごてを使用しましたが、一般的なはんだごてとこれの違いは想像できませんでした。ですから、それを試すために独自のコントローラーを作成することは素晴らしいアイデアでした。
私が最初に直面した問題は、はんだごての上に構築されたコネクタでした。あまり使用されなかったので、ソケットが見つからなかったので、はんだごての特性に合った別のコネクタを使用しました。このコネクタは、以下のコンポーネントリストに記載されている航空プラグGX16-5です。すべてのコンポーネントが郵送されたら、独自のはんだ付けコントローラーを作成できました。
私のコントローラーの主な機能は次のとおりです。
- PID法は、はんだごての温度を維持するために実装されています。アイロンは約30秒で温度を上げ、摂氏3度以内に保ちます。
- PIDアルゴリズムは非常に感度が高く、供給電力をすばやく増やすことができるため、コントローラーは頻繁に使用する場合に温度を維持します。
- コントローラーは、温度を維持し、電力を供給し続けるという2つの動作モードをサポートしています。
- コントローラーは加速ロータリーエンコーダーを実装しています。エンコーダをゆっくり回転させると、温度設定が1度変化します。エンコーダーが速く回転すると、温度設定が5度変化します。
- 温度設定が変更された場合に備えて、はんだごてを使用した後、温度はarduinoEEPROMに保存されます。
- コントローラーは、表示の明るさと表示温度に使用される単位(摂氏または華氏)の2つのカスタマイズ設定をEEPROMに保存します。
- コントローラーはリングバッファーを実装して、arduino EEPROMにパラメーターを保存します。これにより、EEPROM使用のリソースが増加します。
- コントローラーには、可変抵抗器の調整(後でスキーマと説明を参照)および温度設定の校正に役立つ校正モードがあります。このモードは、コントローラーのセットアップ手順中にヘルプを提供します。
コントローラメニュー
前に述べたように、コントローラーにはいくつかのモードがあります:
- スタンバイモード
- 主な作業モード(温度を維持)
- 電源モード(供給された電力を維持)
- セットアップモード
- 調整モード(はんだ付けコントローラーのキャリブレーション)
コントローラの電源を入れると、スタンバイモードがアクティブになります。このモードでは、はんだごての電源がオフになり、メイン画面に「OFF」というメッセージが表示されます。このモードでは、メイン画面に温度設定が表示されることがあります(左側のセグメントの「t。」記号)。エンコーダーハンドルを回転させることにより、必要な温度を調整できます。はんだごてが以前に使用されていた場合、スタンバイモードのインジケーターは「冷却プロセス」をアニメーション化し、LEDバーははんだごての温度を示します。アイロンが冷えると、メイン画面に「C0Ld」のメッセージが表示されます。
はんだごての電源を入れるには、エンコーダーハンドルを軽く押します。コントローラがメインモードに切り替わります。これで、コントローラーははんだごての温度を必要な温度近くに保ちます。エンコーダーを回転させることにより、必要な温度を変更することができます。メイン画面には、設定温度(左桁の記号「t。」)または現在のはんだごて温度が表示されていました。 LEDバーインジケータは、供給された電力を示します。スタンバイモードに戻るには、エンコーダーハンドルを軽く押します。
メインモードでエンコーダを長押しすると、電源モードをオンにできます。電源モードでは、エンコーダーを回転させることにより、はんだごてに供給される電力を手動で直接調整できます。メイン画面には鉄の温度が表示され、LEDバーには供給された電力が表示されます。ロータリーエンコーダーハンドルを長押しすると、コントローラーがパワーモードからメインモードに戻ります。
セットアップモードに入るには、スタンバイモードでエンコーダーを長押しします。セットアップモードでは、構成パラメーターを調整できます。このモードには5つのメニューエントリがあります:
- 温度単位( 'Un。C/ F')
- ディスプレイの明るさ( 'br。[0-15]')
- 鉄のキャリブレーション(「tunE」)
- 変更を保存する(「APLy」)
- 変更のキャンセル(「CACL」)
ハンドルを回してメニュー項目を選択します。選択した項目を変更するには、エンコーダーハンドルを軽く押します。パラメータを調整した後、ハンドルをもう一度押すと、セットアップメニューに戻ります。エンコーダーハンドルを長押しすると、スタンバイモードに戻り、パラメーターをEEPROMに保存できます。 「適用」項目のエンコーダーを軽く押すと、パラメーターを保存することができます。メニューからメインモードに戻って変更を破棄するには、30秒待つか、アイテム「キャンセル」を選択します。
センサー読み取り値の主要なスキーマ変更
このコントローラーの電気スキーマには、元のコントローラーのマイナーな変更があります。まず、私の鉄の取っ手、hakko 907は、熱電対ではなく、熱抵抗器を使用して温度を測定します。これは、温度の読み取りに使用されるスキーマを下の図に示すように変更する必要があることを意味します。
<図>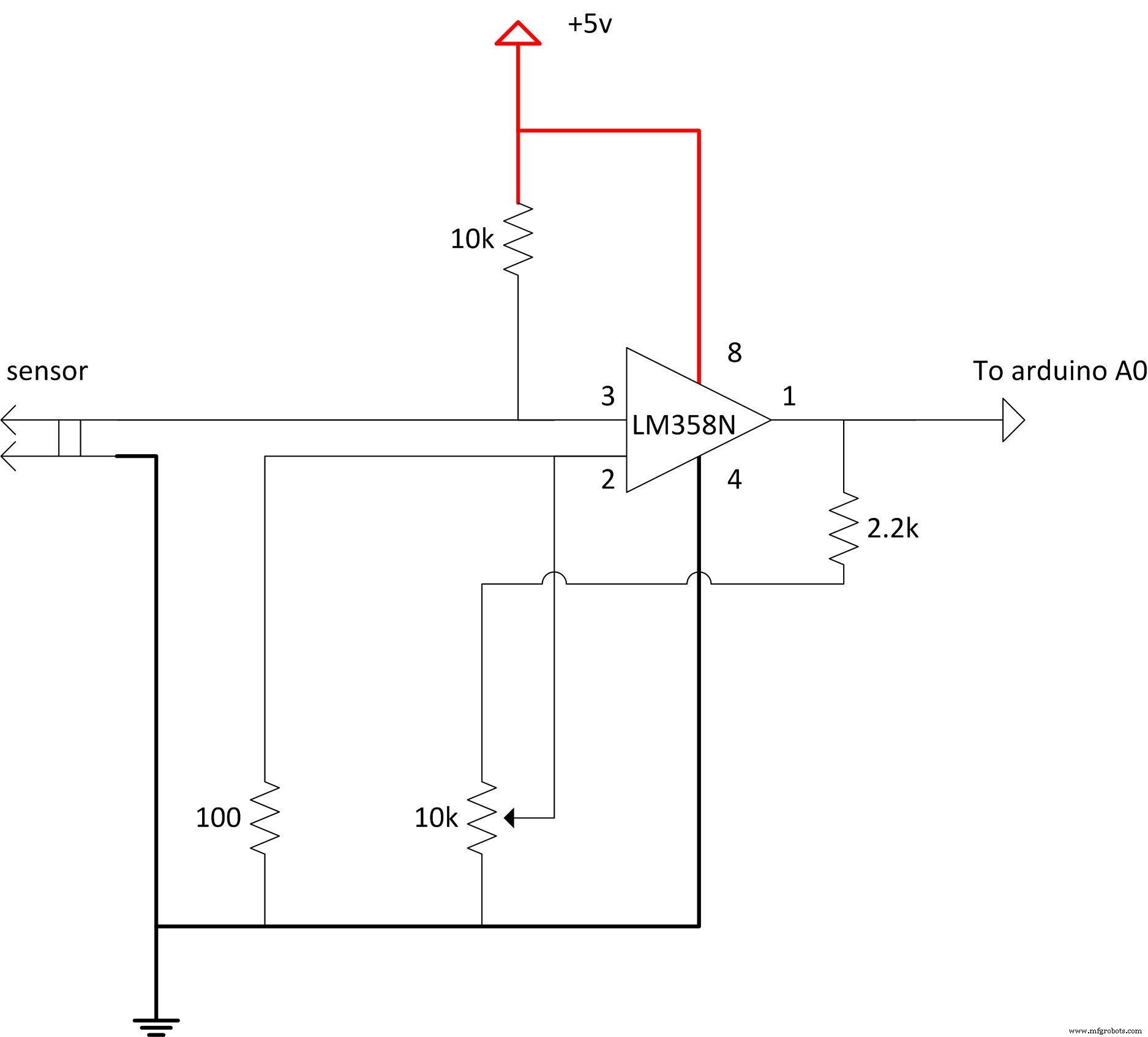
hakko 907のハンドルには、センサーの抵抗が異なります。寒いときは約50オーム、はんだごての温度が摂氏400度になると抵抗は約200オームに上昇します。おそらく他の鉄のハンドルは異なるパラメータを持つことができるので、私はアンプLM358Nを調整するために可変抵抗器を使用することにしました。この可変抵抗器は、次のように調整する必要があります。アイロンが高温のとき、出力電圧は約4ボルトになるはずです(arduinoのA0ピンの読み取り値は700です)。
2番目のリリースに関する注意 :アンプLM358Nはあまり正確ではありません。このアンプでは、温度の読み取り値に多少の変動があります。新しいコントローラーを作成する場合は、を使用することをお勧めします。 別の バージョンのハードウェア、またはアンプをより正確なものと交換してください。例:ad822、lt1013、lmc6462。
キャリブレーション手順を簡素化するために、調整モードはコントローラー内に実装されています。チューニングモードは設定メニューから実行できます。
校正手順には2つの目標があります。変数レジスタを調整することと、内部温度の読み取り値を摂氏または華氏に変換する式を計算することです。はんだごての温度は、arduinoのA0ピンを読み取ることにより、内部ユニット0〜1024で測定されます。内部温度の単位を使用するのは便利ではないため、この単位を人間が読める形式の値に変換する必要があります。
チューンモード
コントローラーを校正するには、外部温度計が必要です。
調整モードでは、可変抵抗器を調整し、コントローラーの温度測定値を校正できます。プログラムスケッチでは、はんだごての温度間隔は摂氏180〜400度であると想定されています。プログラム内の定数を編集することにより、この間隔を変更することができます。
チューンメニューには次の5つの項目があります。
- 上限温度を調整します(左側のセグメントの上の四角)。
- 低温を調整します(左側のセグメントの低い四角)。
- デフォルト値をEEPROM( 'dEFt')に書き込みます。
- キャリブレーションデータを保存します(「APLy」)。
- 変更せずに前のメニューに戻る(「CACL」)
最初の2つのメニュー項目の数字は、上限温度と下限温度のセンサー読み取り値を示しています。最初は、値はゼロに等しいです。
調整モードがアクティブになったら、最高温度と最低温度を設定する必要があります。まず、最高温度を設定します。このモードでは、コントローラは内部ユニットで温度の読み取り値を表示します。エンコーダーを回転させて、摂氏400度を維持するように電力を調整します(外部温度計を使用)。最初に、電力を最大値まで上げて鉄の加熱を高速化し、次に電力を下げて温度を400度に保つことができます。
次に、可変抵抗ハンドルを回転させます。 約700程度の測定値を取得します。この読み取り値が最大値ではないことを確認し、変数レジスタを回転させて730-750を取得し、700に戻します。コントローラは最大値よりも高い温度を測定できる必要があるため、重要です。
可変レジスタが調整されたら、エンコーダを軽く押します。次に、最低温度である180度を調整します。エンコーダーを回転させて電力を下げ、温度を180度に保ち、長押しします。 変更を保存するためのハンドル、またはメニューから「APLy」項目を選択します。コントローラは、摂氏400度と180度の内部温度の読み取り値を保存します。このデータは、内部温度の読み取り値を摂氏(または華氏)度に変換するために使用されます。
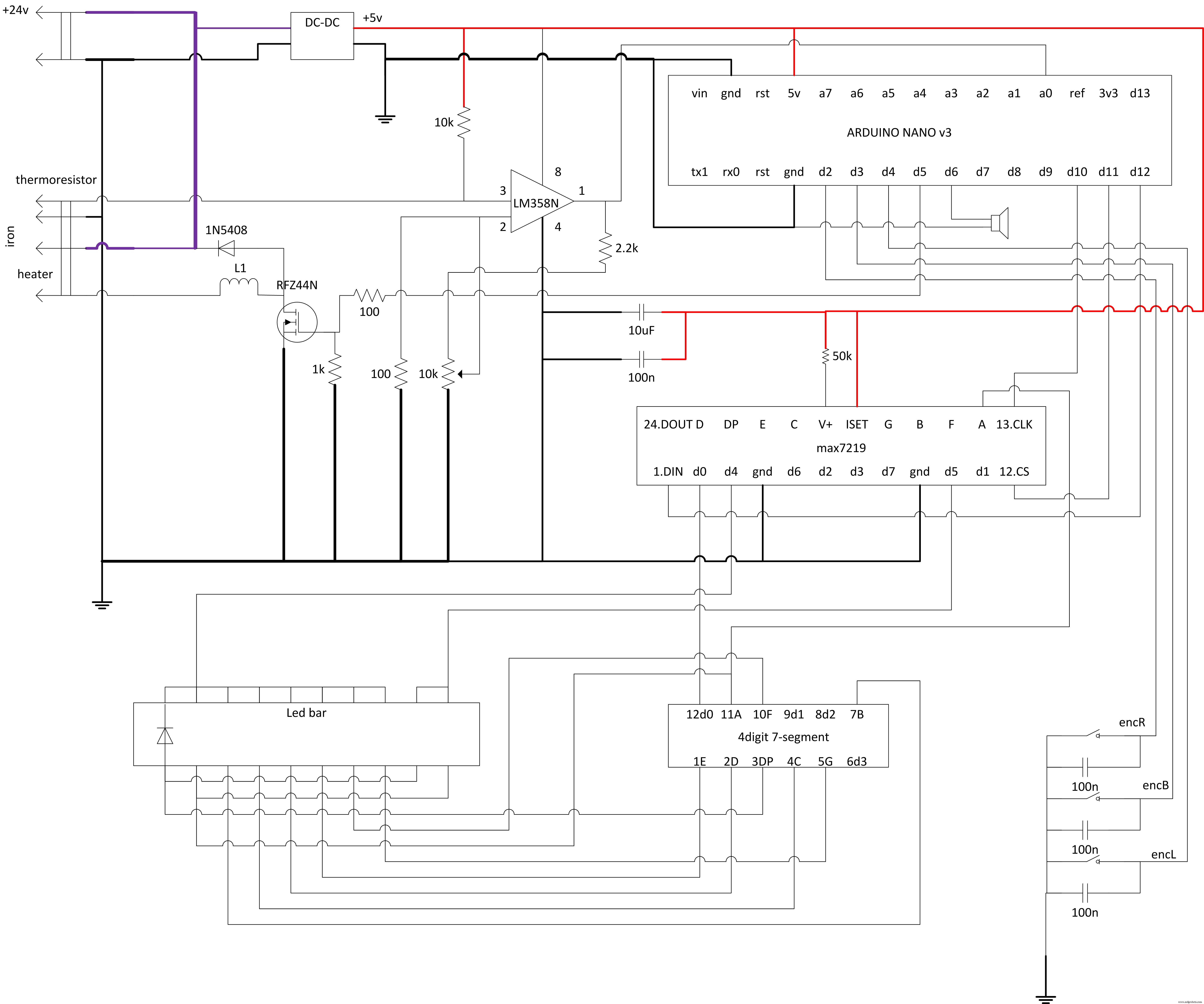
はんだごてヒーターのマイナースキーマ変更
私の友人は、電源コンデンサのリソースを節約するために別のスキーマ変更をアドバイスしました。下の図でわかるように、スキーマは、PWMがMOSFETトランジスタをアクティブ化するときに電力ピークを制限するためにある程度の誘導性を実装しています。
<図>
L1の誘導性は、直径約2 cmのフェライトコアで、1mmのワイヤが12本あります。ダイオード1N5408は、MOSFETが閉じているときにL1誘導性から電力を取り除きます。このアドバイスが電源リソースを節約できることを願っています。この誘導性は、作りたくない場合はストレートワイヤーに置き換えることができます。
結論
制御されたはんだごてを使用することは大きな喜びです。急速に加熱され、状況に適した温度を維持します。
<図>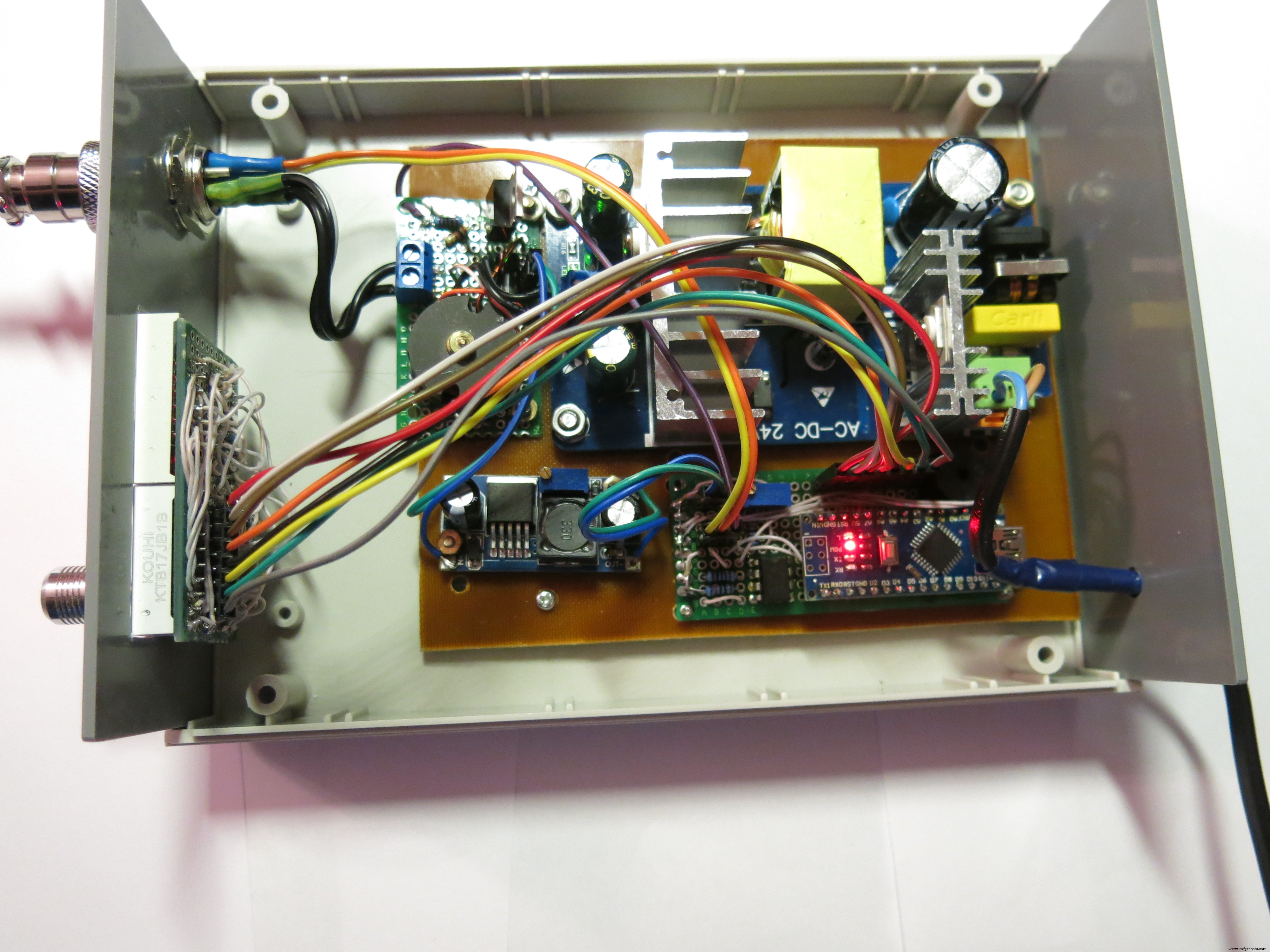
コード
はんだ付けコントローラーのソースコード
https://github.com/sfrwmaker/soldering_controller/blob/master/soldering_station.ino 回路図
製造プロセス