


Arduino Dynamic Web Control
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 |
このプロジェクトについて
はじめに
初心者の方は、Arduino-サーボモーターとArduino-Wifiについて読むことをお勧めします。
Arduinoをインターネットに接続するには、イーサネットシールド、Wifiシールド、PHPoCシールド、PHPoCWifiシールドなどのインターネットシールドを使用する必要があります。
PHPoCシールドの優れた機能は、イーサネットやWifiシールドのようなインターネット接続を提供するだけでなく、WebブラウザからArduinoを制御および監視できるWebサーバーも提供することです。 WebSocketもサポートしているため、WebページをリロードせずにArduinoをリアルタイムで制御および監視できます。
PHPoC Shieldには、いくつかの組み込みWebアプリケーションがあります。詳細については、このリンクを参照してください。
このプロジェクトでは、 Web Remote Control / Slide のUI(ユーザーインターフェイス)を変更しました Webアプリケーション、およびWebブラウザから受け取った角度に従ってサーボモーターの角度を回転させるArduinoコードを記述しました。
配線
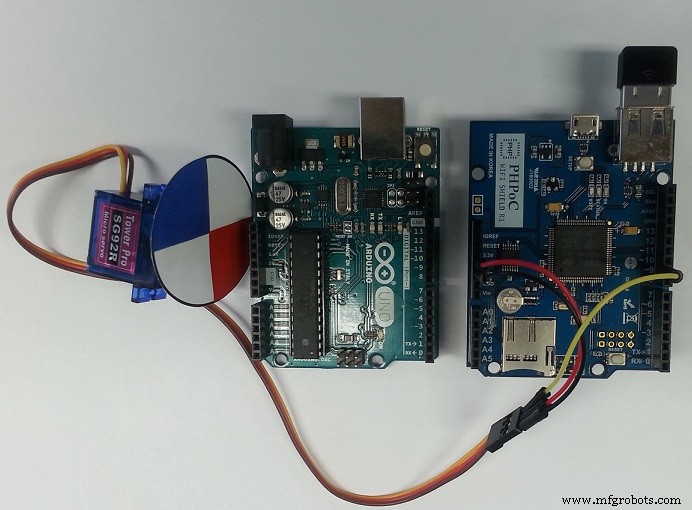
- ArduinoにPHPoCシールドをスタックする
- ピンGND、VCC、およびサーボモーターの信号をそれぞれArduinoのGND、5V、およびピン9に接続します。
データフロー
Webブラウザ---> PHPoCシールド---> Arduino
Webアプリは、タッチまたはマウスイベントに基づいて角度を計算し、WebSocketを介してPHPoCシールドに送信します。このデータを受信すると、PHPoCシールドはそれをArduinoに渡します。 Arduinoは角度に応じてサーボモーターを回転させます。
私たちがしなければならないこと
- PHPoCシールドのWifi情報(SSIDとパスワード)を設定します
- 新しいUIをPHPoCシールドにアップロードする
- Arduinoコードを書く
PHPoCシールドのWifi情報を設定する
次の手順を参照してください:http://www.phpoc.com/support/manual/p4s-347_user_manual/contents.php?id =network_first_setup
新しいUIをPHPoCシールドにアップロードする
- PHPoCソースコードremote_rotate.phpをダウンロードします(コードセクション)
- この手順に従って、PHPoCデバッガーを使用してPHPoCシールドにアップロードします
Arduinoコードを書く
- Arduino IDEにArduinoのライブラリをインストールし(手順を参照)、ArduinoIDEを再起動します。
- Arduino IDEで、[ファイル]-> [例]-> [Phpoc]-> [WebRemoteSlideとファイル]-> [例]-> [サーボ]-> [スイープ]に移動します。
- 2つの例を1つにまとめると、Webページを介してサーボモーターを制御するためのコードがあります(コードセクションのソースコードを参照してください)。
テスト
- ArduinoIDEのシリアルボタンをクリックしてIPアドレスを確認します
- Webブラウザを開き、http:// replace_ip_address と入力します /remote_rotate.php
- 接続ボタンをクリックしてテストします
初心者のための最高のArduinoスターターキット
Arduinoキットをお探しの場合は、初心者向けの最高のArduinoキットをご覧ください
関数リファレンス
- Arduino-サーボライブラリ
- Servo.attach()
- Servo.write()
- Servo.writeMicroseconds()
- Servo.read()
- Servo.attached()
- Servo.detach()
- Serial.begin()
- Serial.println()
- delay()
- forループ
- whileループ
- その他の場合
- loop()
- setup()
- String.toInt()
コード
- remote_rotate.php
- Arduinoコード
remote_rotate.php PHP
<!DOCTYPE html>PHPoCShield-Arduino用のWebリモートコントロール
Web Remote Control / Rotate
WebSocket: null
角度: 0
Arduinoコード Arduino
/ * arduino Webサーバー-リモートコントロール(スライドスイッチ)* /#include "SPI.h" #include "Phpoc.h" #includePhpocServer server(80); Servo myservo; //サーボチャーを制御するサーボオブジェクトを作成しますslideName; int slideValue; void setup(){Serial.begin(9600); while(!Serial); Phpoc.begin(PF_LOG_SPI | PF_LOG_NET); //Phpoc.begin(); server.beginWebSocket( "remote_slide"); Serial.print( "WebSocketサーバーアドレス:"); Serial.println(Phpoc.localIP()); myservo.attach(9); //ピン9のサーボをサーボオブジェクトに接続しますmyservo.write(1); } void loop(){//新しいクライアントを待つ:PhpocClient client =server.available(); if(client){String slideStr =client.readLine(); if(slideStr){slideValue =slideStr.substring(1).toInt(); myservo.write(slideValue); Serial.print( "角度:"); Serial.println(slideValue); }}}
製造プロセス