


可能な限り最小限の部品で最もシンプルなCNCマシン–DIYレーザー彫刻機
このチュートリアルでは、3Dプリンターを使用せずに、可能な限り最小限の部品で最も単純なCNCマシンを構築する方法を紹介します。それは正しい。最近のプロジェクトのほとんどで3Dプリンターを使用しています。もちろん、3Dプリンターは、好きな形を簡単に作成できるため、プロトタイピングに最適です。ただし、すべての人が3Dプリンターを持っているわけではないので、3Dプリンターや他のCNCマシンを使わなくても、ものを作ることができることをお見せしたいと思います。
次のビデオを見るか、以下のチュートリアルを読むことができます。
単一の動力工具、ドリル、およびいくつかの手工具を使用して、このCNCマシンをどのように構築したかを示します。このビルドで使用した素材は8mmMDFボードです。これは、実際には3DプリントされたPLA素材よりも非常に丈夫で、おそらく剛性が高く、同時に操作も簡単です。
このビデオでは、このCNCマシンをレーザー彫刻機として使用し、将来のビデオでは、ペンプロッターとして機能させる予定です。

明らかに、このタイプの機械の構造はあまり剛性を提供できないため、CNCルーターやミルとして使用することはできません。しかし、もっと強力なレーザーを取り付けると、ここで使用しているこのMDFボードや他の種類の木製ボードなど、さまざまな材料を非常に正確に切断するために使用できます。
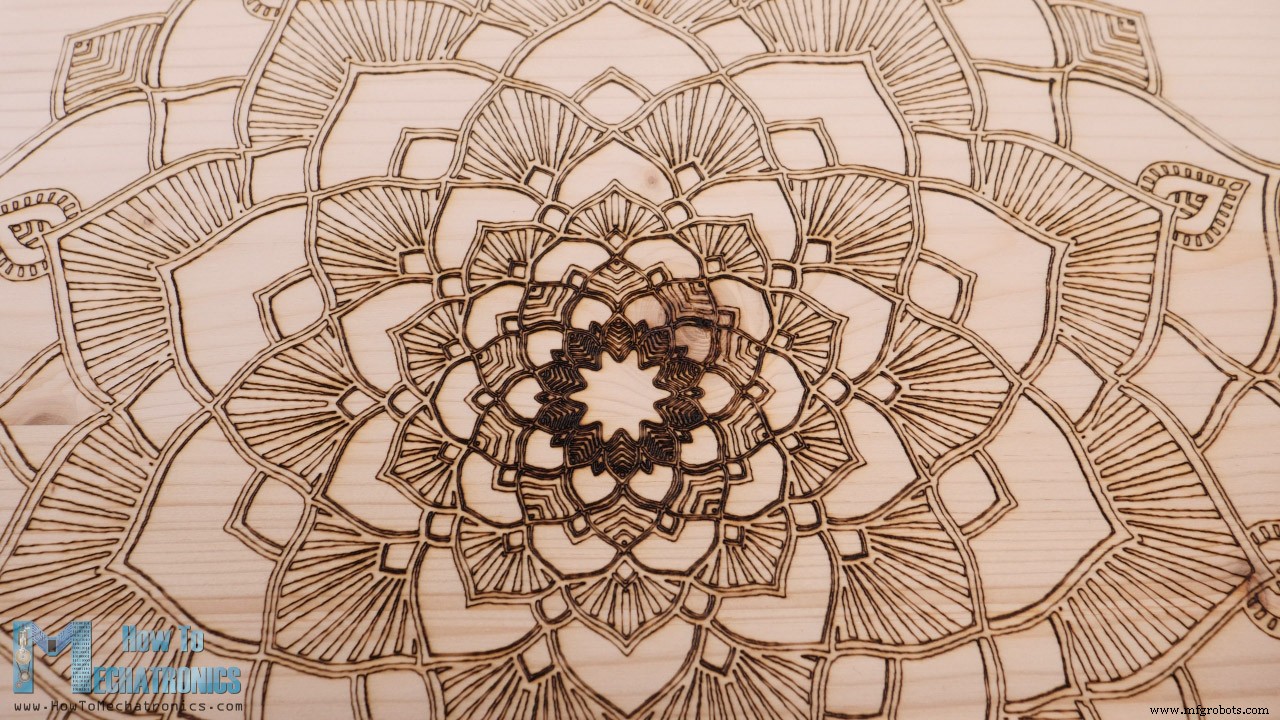
の作業領域は390x360mmと非常に大きく、このレーザー彫刻家が生み出すことができる細部のレベルはかなり印象的です。正直なところ、彫刻がどれほど優れているかに驚きました。
このCNCマシンの頭脳は、CNCシールドと組み合わせたArduino UNOボードですが、レーザー彫刻用の図面や画像の準備、Gコードの作成、無料のオープンを使用したマシンの制御方法についての詳細もあります。ソースプログラム、ビデオの少し後で。
DIYCNCレーザー彫刻機3Dモデル
SOLIDWORKSforMakersを使用してマシンを設計することから始めました。このCNCマシンの2つの主要コンポーネントは、これらのMGN15Hリニアレールと適切なスライディングブロックです。
ブロックまたは2つの軸を駆動するために、2つのNEMA17ステッピングモーターといくつかの適切なGT2プーリーおよびタイミングベルトを使用しています。すべてを接続するために8mmMDFボードを使用し、マシンをホーミングするために2つのマイクロリミットスイッチを使用しています。
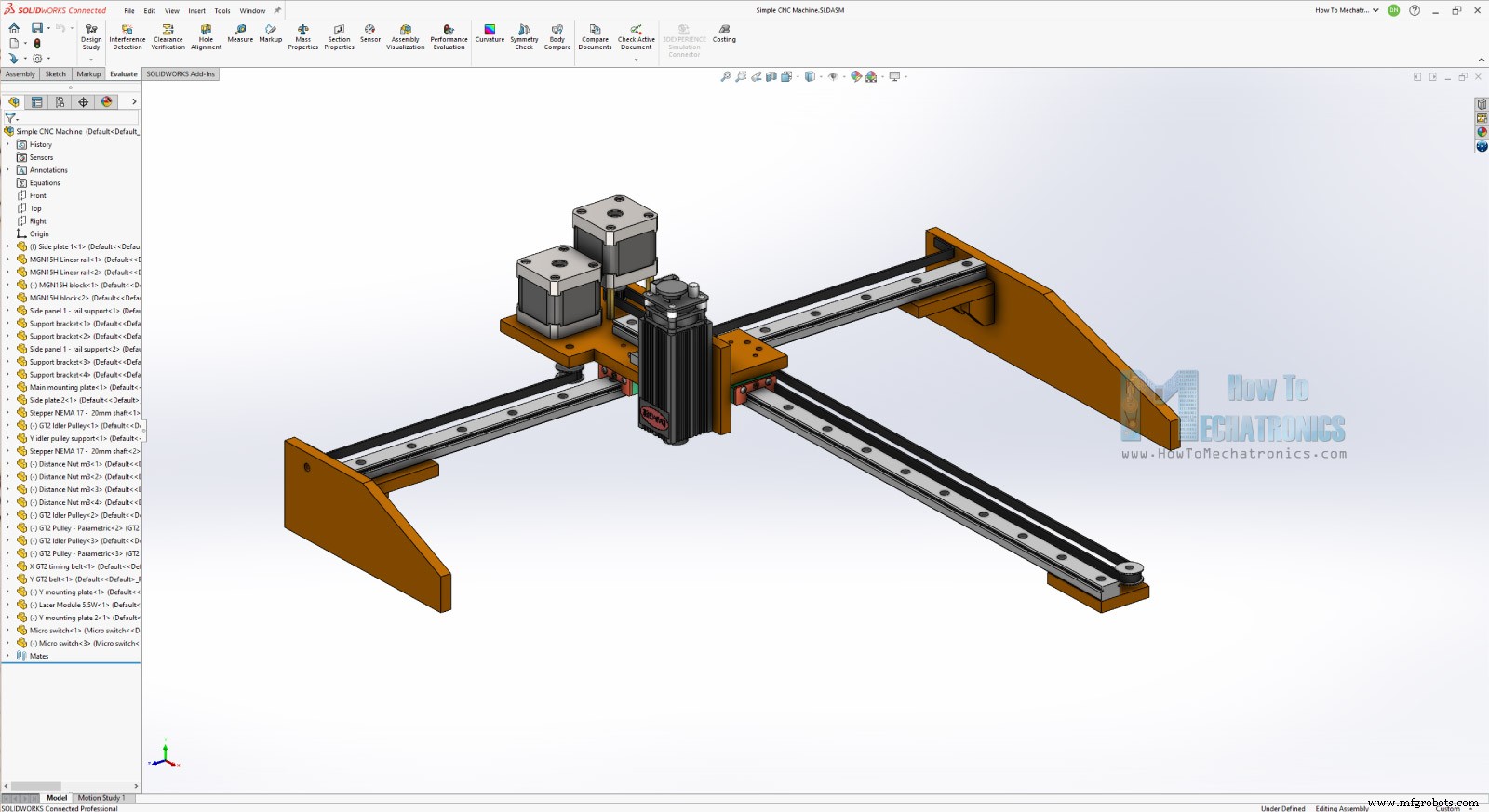
これで、最小限の部品で可能なCNCマシンです。
ここから3Dモデルをダウンロードできます:
この3Dモデルを見つけてダウンロードしたり、Thangsのブラウザで調べたりすることができます:
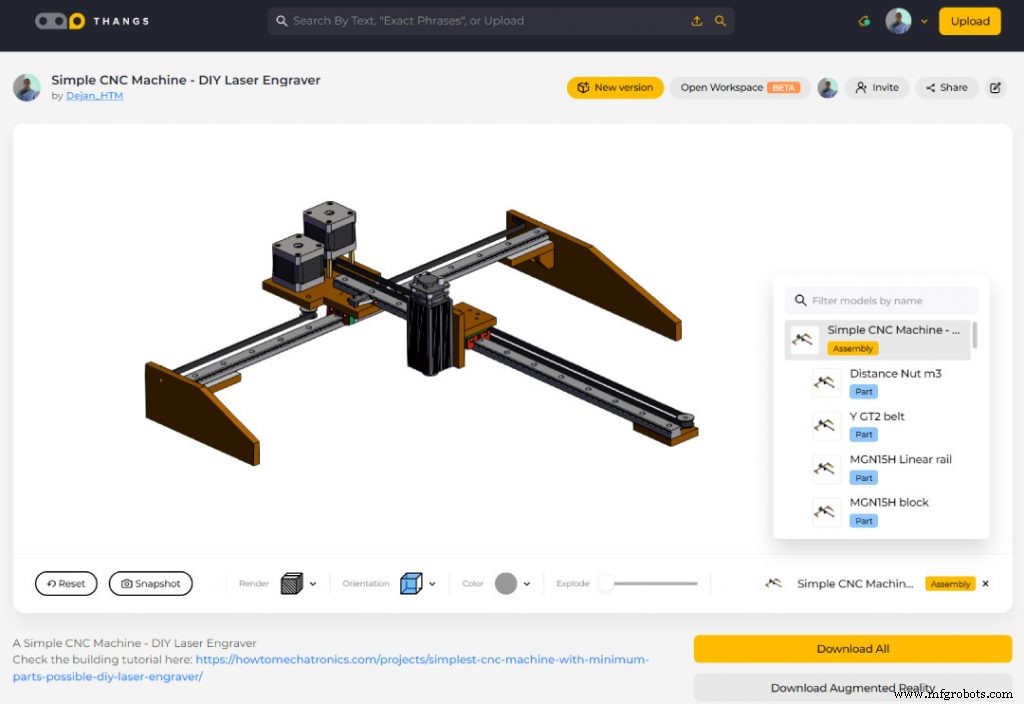
Thangsからアセンブリの3Dモデルをダウンロードします。
このチュートリアルをサポートしてくれたThangsに感謝します。
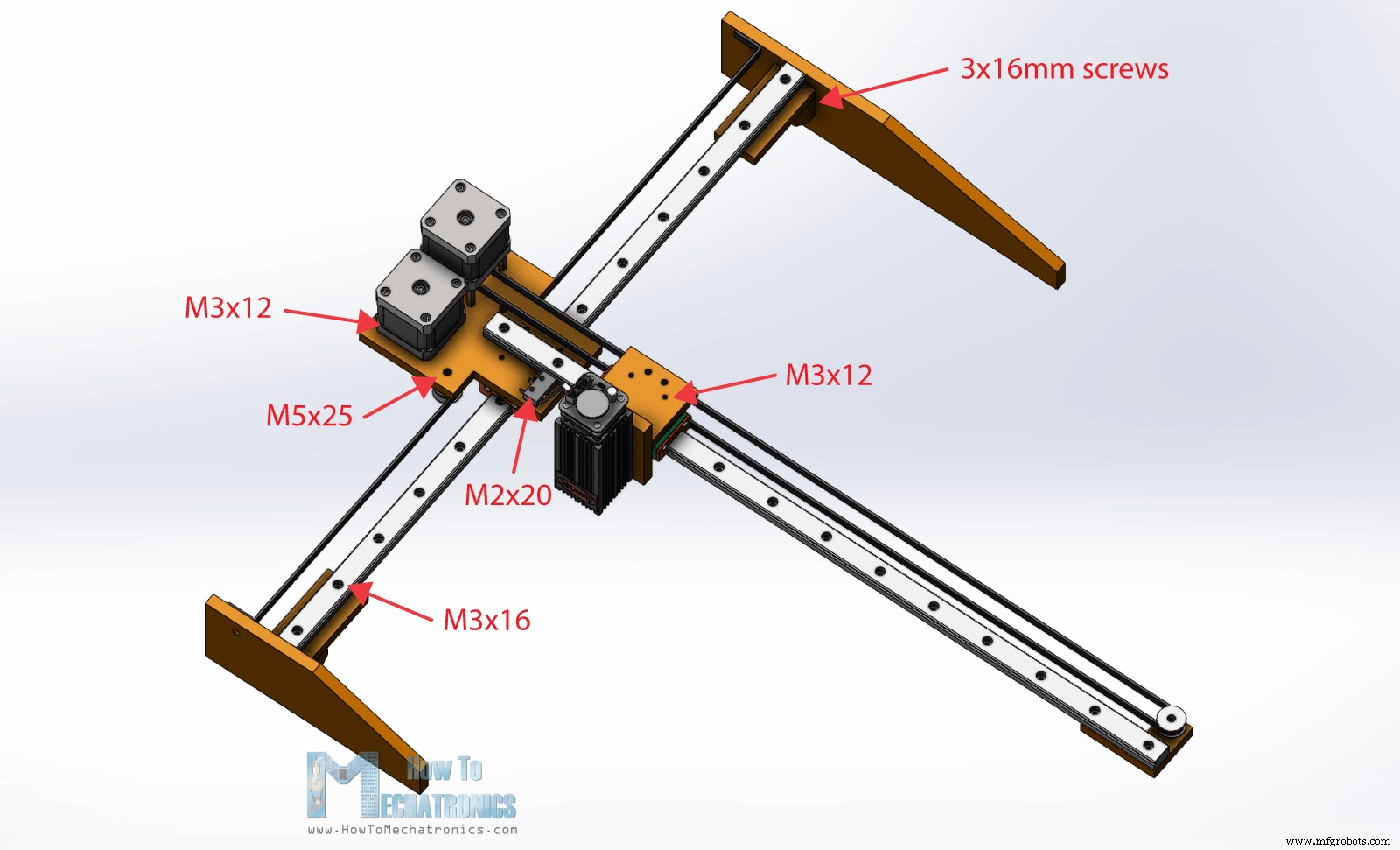
中央の取り付けプレートの図は次のとおりです。
参照:ArduinoCNCフォームカッティングマシン
さて、これでマシンの構築を開始できます。このDIYCNCマシンを組み立てるために必要なコンポーネントのリストは次のとおりです。電子部品のリストは、以下の記事の回路図セクションにあります。
- MGN15Hリニアレール…………………………Amazon /バンググッド / AliExpress
- ステッピングモーター–NEMA17…………。…
- GT2ベルト+歯のプーリー……………………Amazon /
- GT2アイドラープーリー…………………………………アマゾン /バンググッド / AliExpress
- スペーサーナッツ……………………………。……../バンググッド /AliExpress
- ボルトとナットのセット……………………………アマゾン /バンググッド /AliExpress または地元の金物店から+平頭ねじ3x16mm
- M2x20 x2、M3x12 x20、M3x16 x6、M5x25 x5、3x16mmネジx20
これが私が使用する8mmMDFボードで、3Dモデルから取った図面に従って、ピースをサイズに合わせてカットします。
関連:自動ツールチェンジャー付きDIYペンプロッター| CNC製図機
そのために、私は可能な限り簡単な方法を使用しました。カットする必要がある場所にマーキングするための鉛筆と、それらをカットするためのハンドソーです。

もちろん、すべてを手作業でカットするのは手間がかかりますが、それでも、この方法でもかなりきれいに仕上げることができます。

すべてのピースを適切なサイズにカットしたら、次に穴を開けます。正確に穴を開けることは、実際には断片を切ることよりも重要です。穴の位置は、リニアレールやステッピングモーターなど、正確で固定された寸法を持つ他の部品と適合しなければならないため、非常に正確である必要があります。

Y軸とステッピングモーターが取り付けられている中央のプレートには多くの穴があり、それらを正しくするために、その部分の図面を実物大で印刷しました。

通常のプリンタは誰でも簡単にアクセスできるので、このプロジェクトの構築に使用したとしても、だまされることはありません。このようにして、パーツと図面を配置し、穴の位置にマークを付けることができます。次に、穴を開けることができますが、これは100%正確になるという意味ではありません。私たちはまだ手作業で仕事をしているので、それらを正しく行うには非常に集中して忍耐強くなければなりません。

ステッピングモーターの開口部を作るために、3mmと5mmのドリルと25mmのドリルが1つ必要です。
次に、X軸レールを固定する機械のベースの組み立てを続けました。そのために、レール支持部を固定する位置に印を付け、基部に2穴、支持部に1穴をあけました。

次に、これら2つの部品を最初の3mmネジと木工用ボンドで固定しました。最初のネジを取り付けた状態で、直角度を確認してから、2mmのドリルでサポート材に2番目の穴を事前に開けました。
同様に、サポートを強化するために2つの角かっこを追加しました。

正直なところ、これらのMDFパーツを組み立てるこの方法は、私たちが行うすべてが手作業で行われ、MDFボードがわずか8mmティックであるため、正方形にするのが非常に難しいため、それほど良くありません。これにより、このプロセスがさらに複雑になります。たぶん、より良くて簡単な方法は、金物店で簡単に見つけることができる金属製のブラケットを使用することでしょう。
それでも、両側の準備ができたら、X軸レールを取り付けました。

これらのMGN15Hレールは、スライドブロックの内部にボールまたはローラーがあるため、非常にスムーズで遊びのない動きを提供します。
それらを取り付ける前に、それらをきれいにし、よくグリースを塗る必要があります。リニアレールを両側に2本のM3ボルトで固定しました。
次に、X軸スライディングブロックの上にY軸を取り付ける必要があります。そのために、中央のプレートを使用します。

ここでも、パーツを固定するためにM3ボルトを使用しています。ステッピングモーターを所定の位置に固定するには、M3ボルトも必要です。
それに加えて、ステッパーの1つには、適切な取り付け高さを得るためにいくつかのディスタンスナットを使用していますが、おそらくこのステッパーをプレートの下側に取り付けることができたので、使用する必要がありますそれらの距離ナット。
X軸を駆動するには、ベルトとステッパープーリーの間に適切な張力をかけることができるように、ステッパーシャフトの近くに2つのGT2アイドラープーリーを取り付ける必要があります。

それらを固定するためにM5ボルトとナットが必要です。 Y軸については、この軸のベルトがループ状に取り付けられるため、レールの反対側に必要なアイドラープーリーは1つだけです。
さて、次は結婚か、X軸とY軸のレールを接続します。 4本のM3ボルトを使用してそれを行います。マシン全体の精度は接続に依存するため、この接続は正確であることが重要です。

正方形の定規を使用して、2つの軸が互いに垂直であるかどうかを確認する必要があります。垂直でない場合は、適切に調整する必要があります。
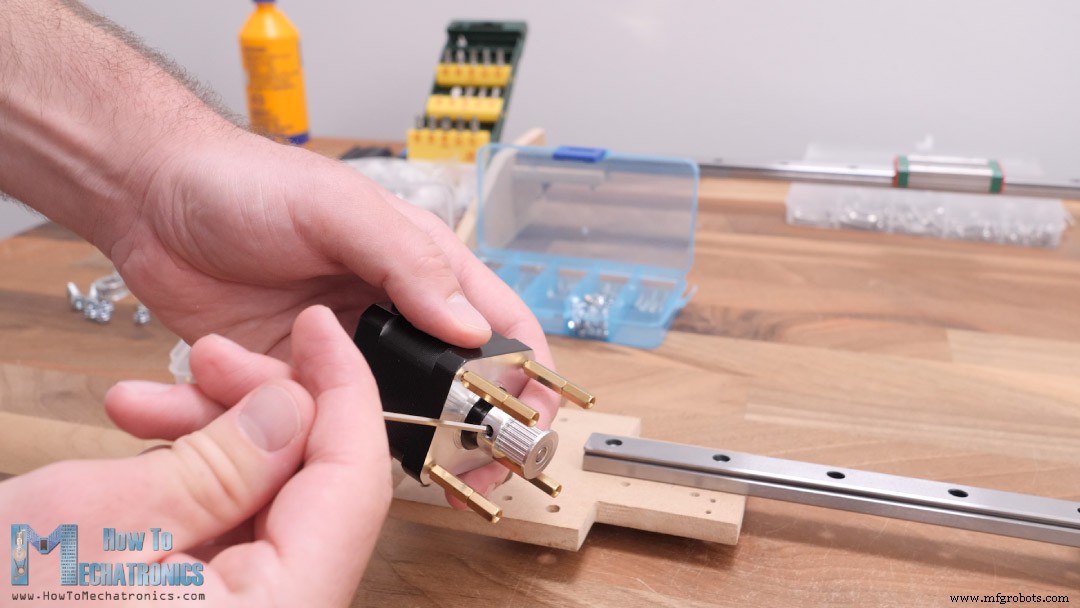
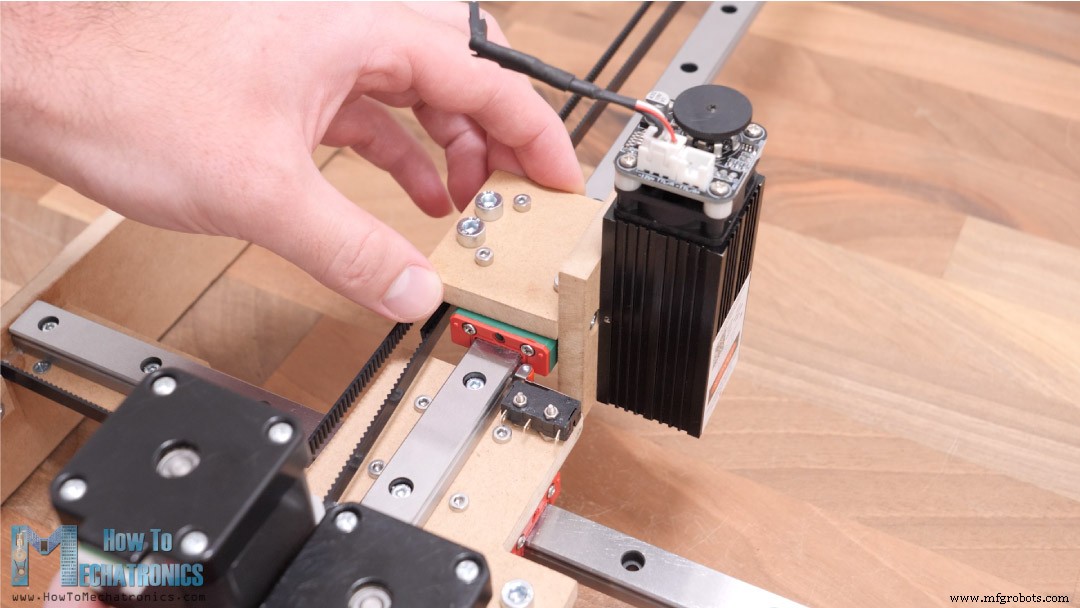
次に、Y軸スライディングブロックに接続し、この場合はエンドエフェクタまたはレーザーモジュールを実際に保持する部品を取り付けることができます。前に説明した方法を使用して、これらの部品を組み立て、4本のM3ボルトを使用してスライドブロックに固定しました。
これで、2本のM3ボルトでレーザーモジュールを所定の位置に固定できます。
GT2ベルトの取り付けを続けました。必要な長さを測定し、ベルトを適切なサイズにカットしました。
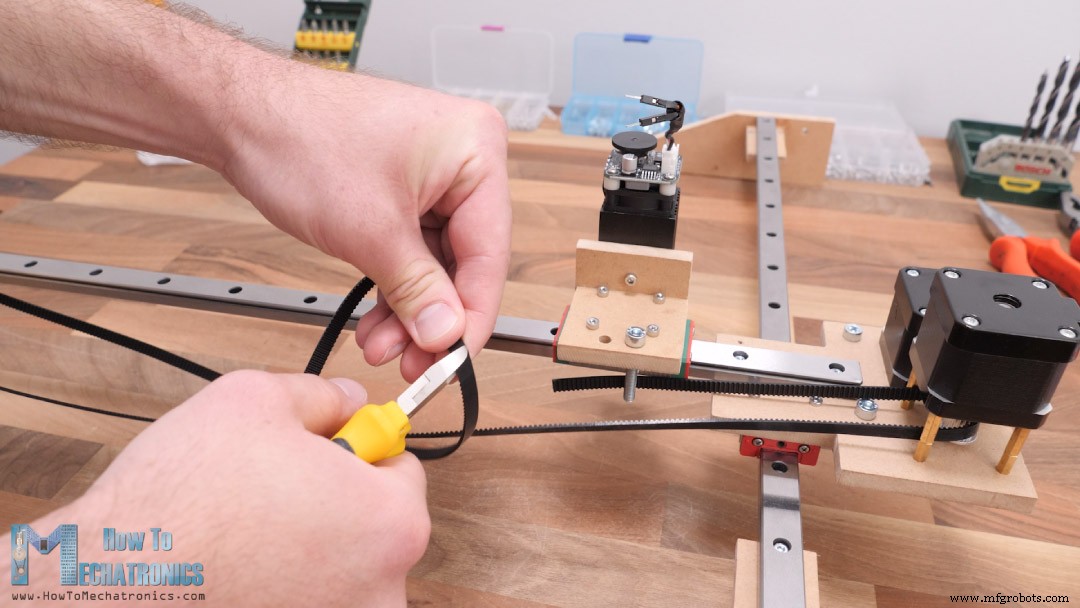
ベルトをスライディングブロックに固定するために、2本のM5ボルトとジップタイを使用しました。
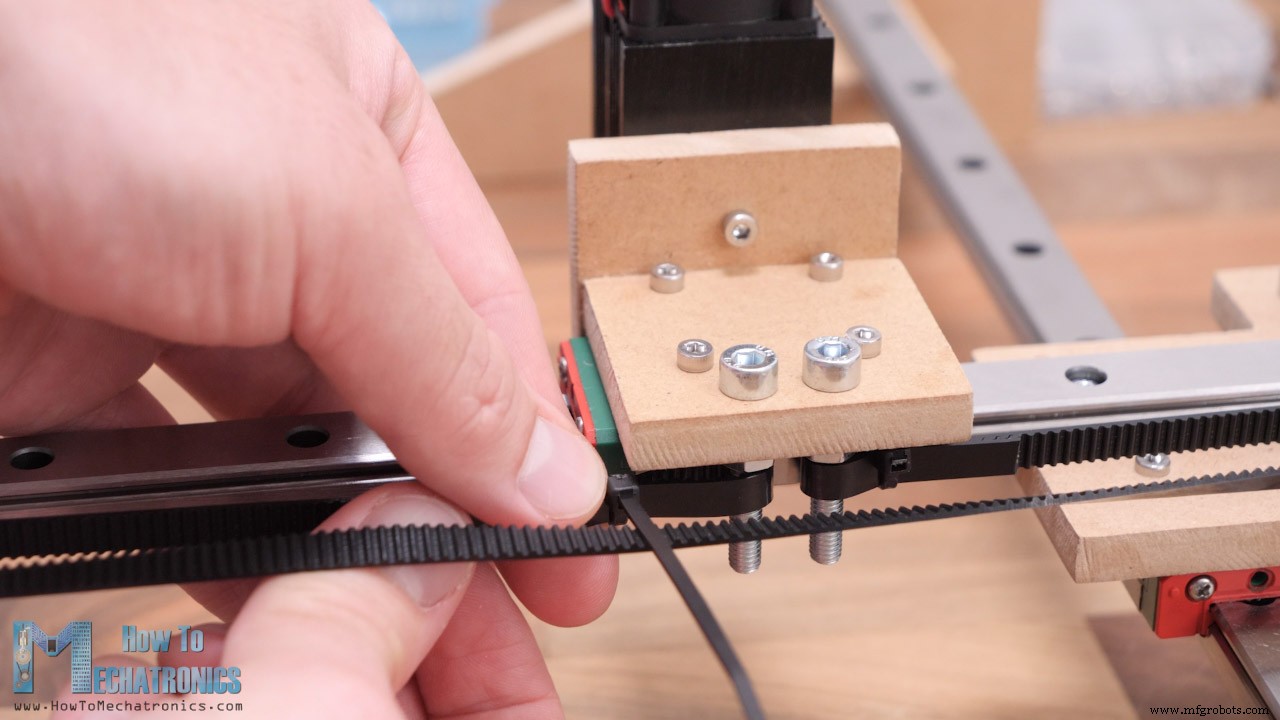
ベルトの最初の側をジップタイでM5ボルトに固定し、次に反対側のベルトに張力をかけ、ジップタイで2番目のボルトに固定しました。
X軸に関しては、ベルトは3つのプーリーを通過しながら、ステッピングモータープーリーとの張力またはグリップを提供するように、一方の側からもう一方の側に一列に引き伸ばされます。
ベルトの両側を1本のボルトと正方形のMDFピースで固定しました。

これで私たちのCNCマシンはほぼ完成しました。私たちがしなければならないことが他にいくつかあります。
下側では、機械がよりしっかりと固定されるように、いくつかの家具パッドを接着しました。
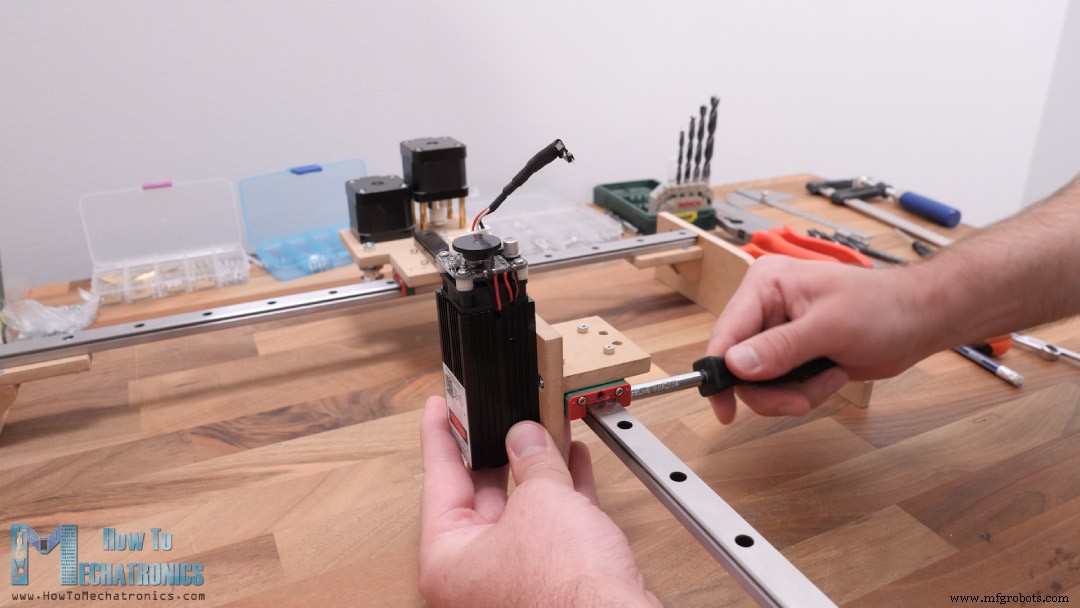
次に、Y軸用のマイクロリミットスイッチを取り付けました。そのためには2本のM2ボルトが必要です。
X軸リミットスイッチについては、中央のプレートに穴を開けるのを忘れたので、マークを付けて現場で穴を開けました。
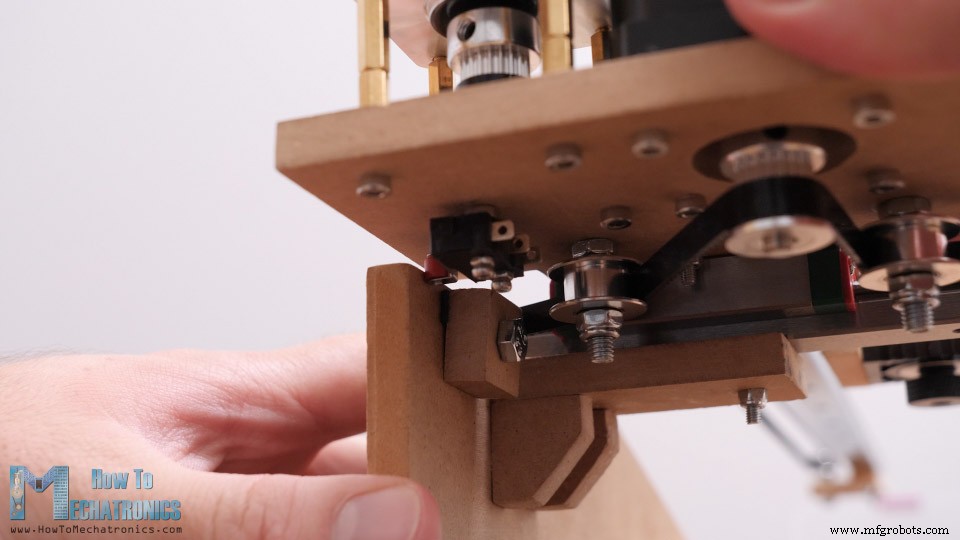
このリミットスイッチを所定の位置に固定するのは少しきついですが、最終的にはうまくいきました。
これで機械部品が完成したので、電子部品の接続に進むことができます。前述したように、ArduinoUNOボードをCNCシールドと2つのDRV8825またはA4988ステッパードライバーと組み合わせて使用します。
マシンの側面にArduinoボードを固定するので、2つのArduino穴に印を付け、3mmのドリルで穴を開けました。サイドパネルとArduinoボードの間に5mmの距離のナットを使用しました。
CNCシールドは単にArduinoボードの上にあります。最高のステッパー解像度を選択するには、ドライバーごとに3つのジャンパーを挿入する必要があります。
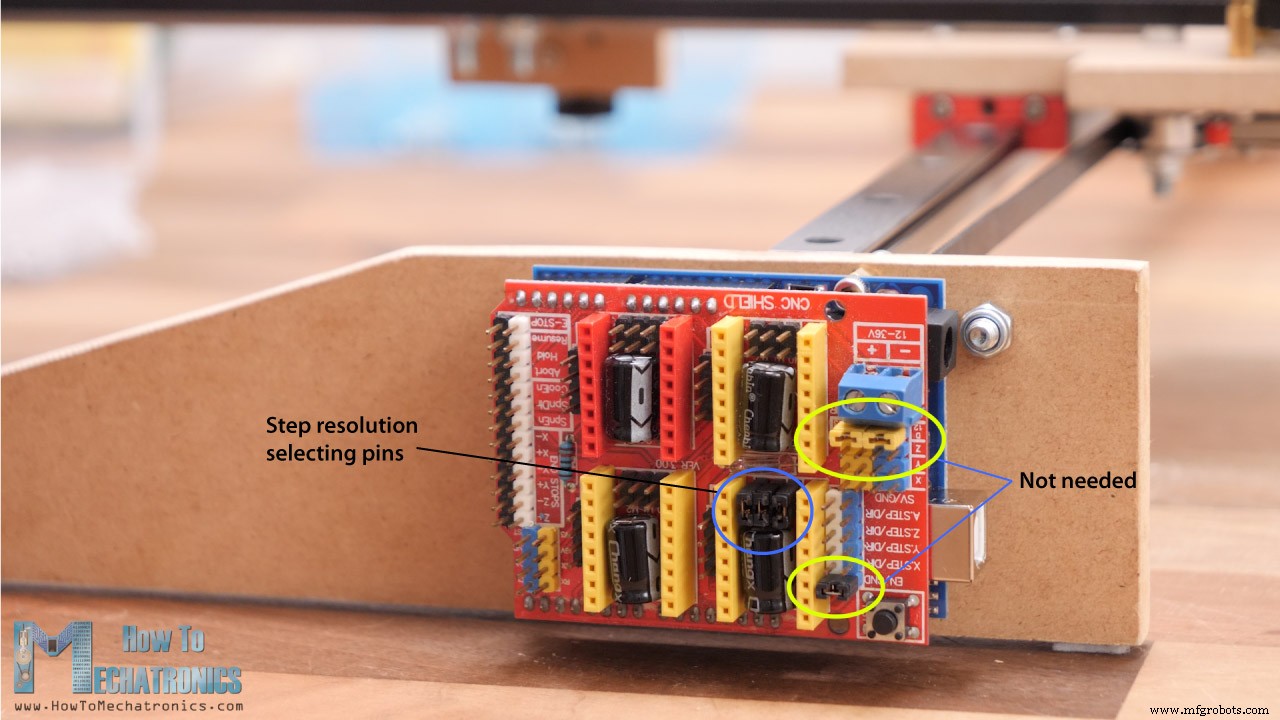
ここで、これら3つのジャンパーは必要ないため、削除する必要があることに注意してください。以前のプロジェクトの1つでそれらを使用しました。
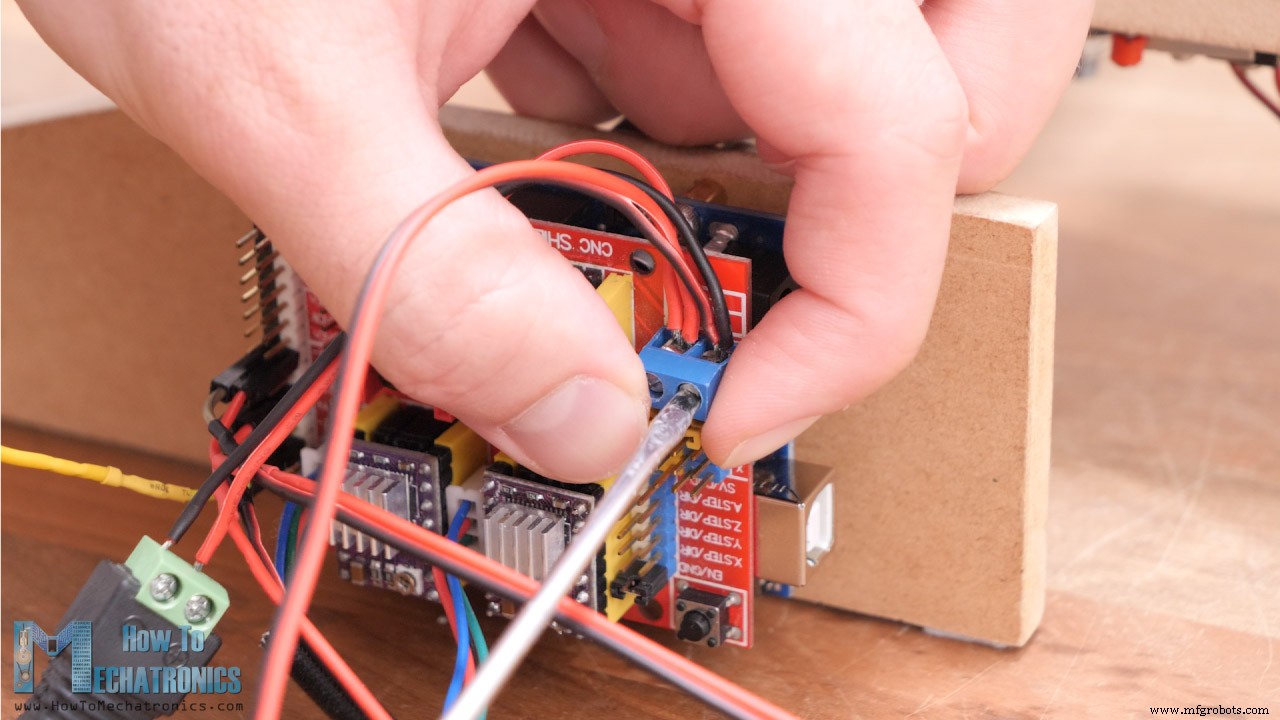
次に、付属のケーブルでステッピングモーターを所定の位置に接続できます。リミットスイッチを接続するには、2本のワイヤー接続が必要です。
ワイヤーの一方の端をエンドストップに直接はんだ付けし、もう一方の側では、CNCシールドに簡単に接続できるようにメスのピンヘッダーをはんだ付けしました。
レーザーモジュールの接続に関しては、3本のワイヤー、GND、12V、およびPWM制御用の信号線が必要です。これらのワイヤーは、マシンの最も遠いポイントに到達できるように、もう少し長くする必要があります。
一方にはレーザーモジュールに接続する3ピンコネクタがあり、もう一方にはCNCシールドの電源コネクタと接続する必要のある信号線に接続するGNDおよび12Vワイヤがあります。 Z+またはZ-エンドストップピンに接続します。
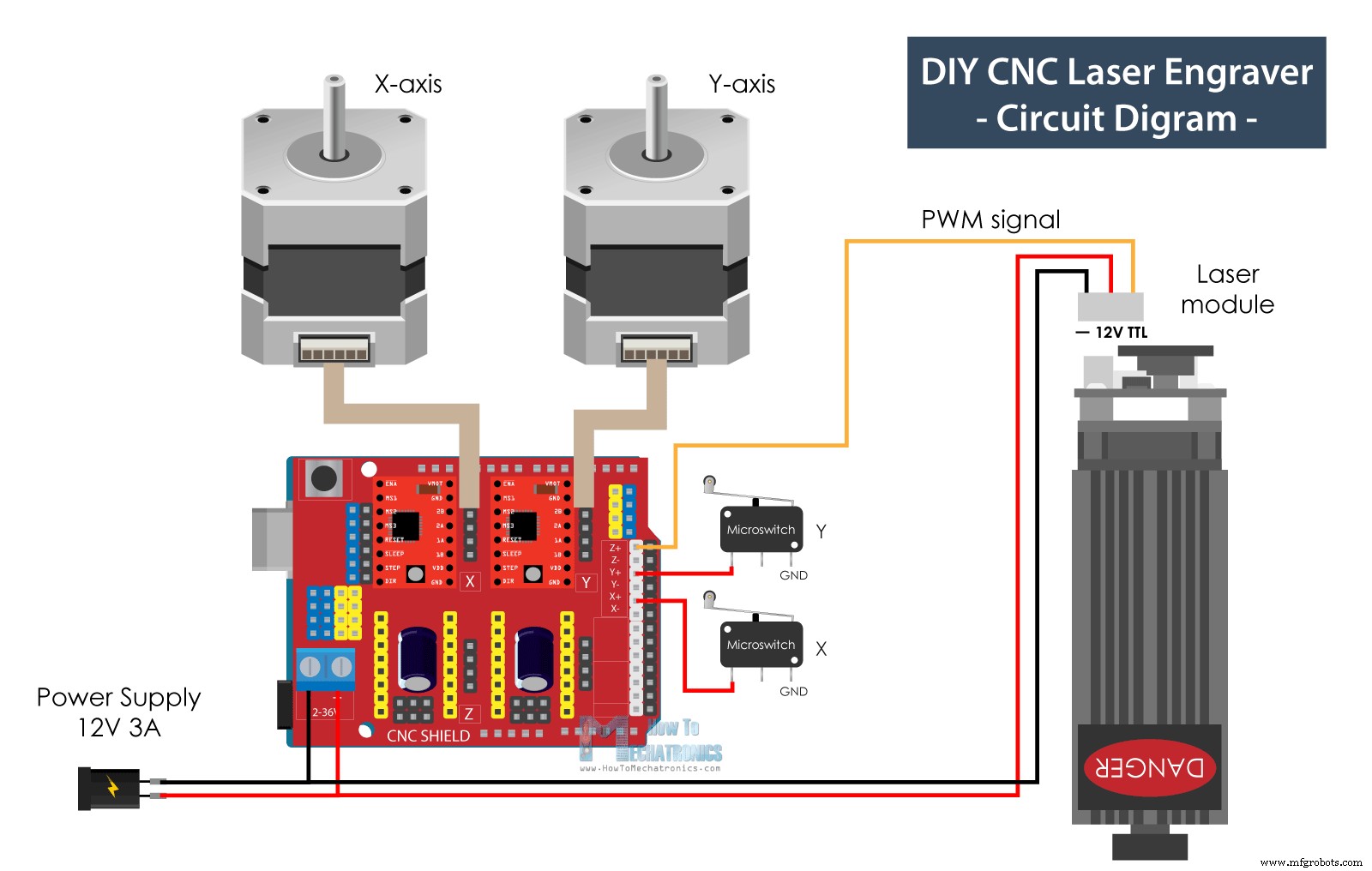
DIYCNCレーザー彫刻機の回路図
これが、すべてを接続する必要がある方法の回路図です。
このプロジェクトに必要なコンポーネントは、以下のリンクから入手できます。
- ステッピングモーター–NEMA17………………
- DRV8825ステッピングドライバー………。……..…
- ArduinoCNCシールド………………………。 アマゾン /バンググッド /AliExpress
- ArduinoUno………………………………..…
- リミットスイッチ…………………………………。 アマゾン /バンググッド /AliExpress
- DC電源…………………………。 Amazon / Banggood /AliExpress
- レーザーモジュール………………………………。 アマゾン /バンググッド / AliExpress
- レーザー安全ゴーグル……………………..アマゾン /バングゴッド / AliExpress
そのため、ArduinoUNOボードをCNCシールドと2つのDRV8825またはA4988ステッパードライバーと組み合わせて使用しています。マシンをホーミングするための2つのマイクロリミットスイッチと、PWM制御が可能な12Vレーザーモジュールがあります。電力を供給するために、3アンペアの最小電流レートの12v電源が必要です。
これで、実際に機械の組み立てが完了しました。今やるべきことは、それに生命を与えるか、それを本物のCNCマシンにすることです。そのためには、CNCマシンの動きを制御するためのファームウェアをArduinoにインストールする必要があります。
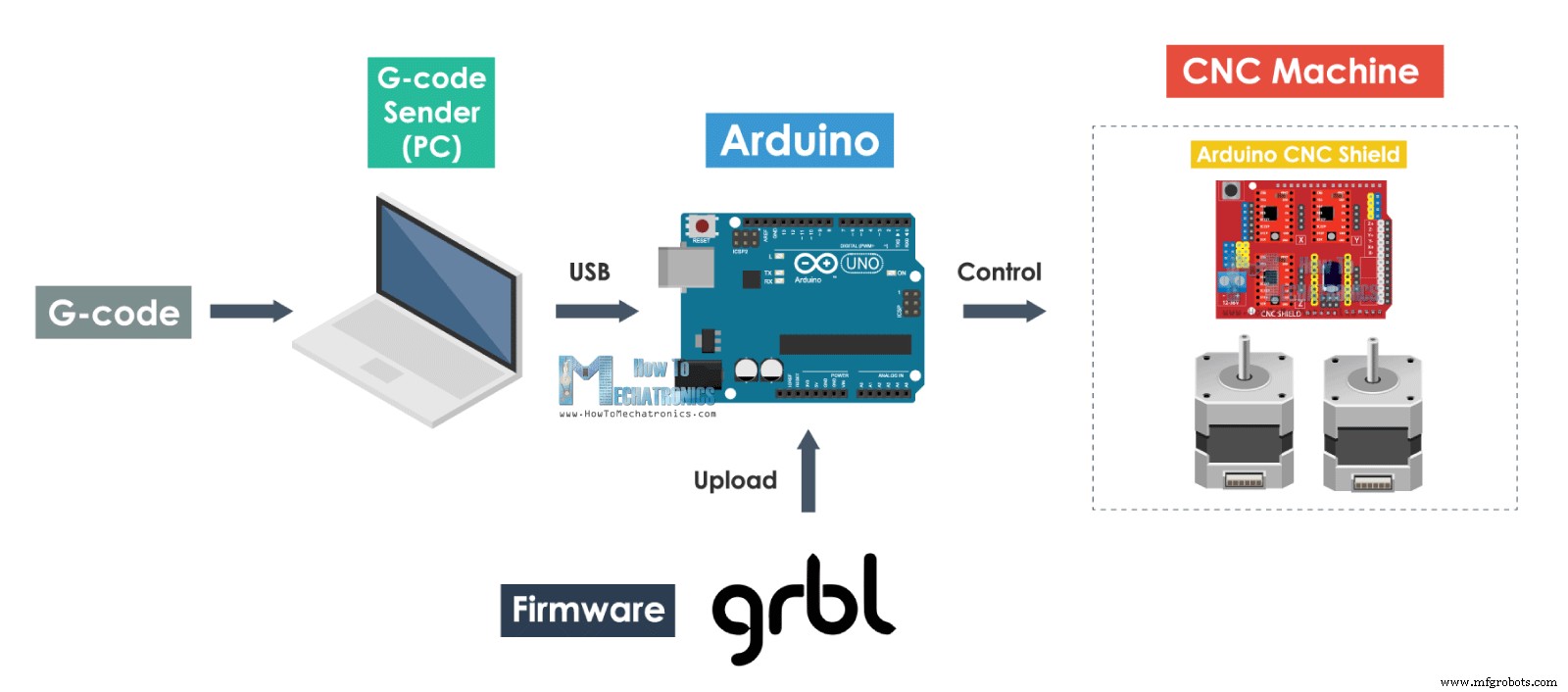
DIY CNCマシンで最も人気のある選択肢は、オープンソースのGRBLファームウェアです。 GRBLファームウェアに加えて、Gコードを送信し、マシンに何をすべきかを指示する制御ソフトウェアも必要です。この場合、LaserGRBLコントローラーを使用します。このソフトウェアは、GRBLファームウェアを使用してレーザー彫刻家を制御するために特別に作成されたものであり、オープンソースでもあることを考えると、この目的のためのすばらしいコントローラーであると言えます。
LaserGRBLを使用すると、GRBLファームウェアを直接フラッシュするかArduinoにアップロードするオプションがあるため、手動で行う必要はありません。必要なものと同じように、XホーミングとYホーミングだけの2軸マシン用にすぐに使用できるバージョンを選択することもできます。

したがって、ArduinoをGRBLファームウェアでフラッシュしたら、マシンをコントローラーに接続してGRBL構成ウィンドウを開き、マシンに応じていくつかのパラメーターを調整できます。
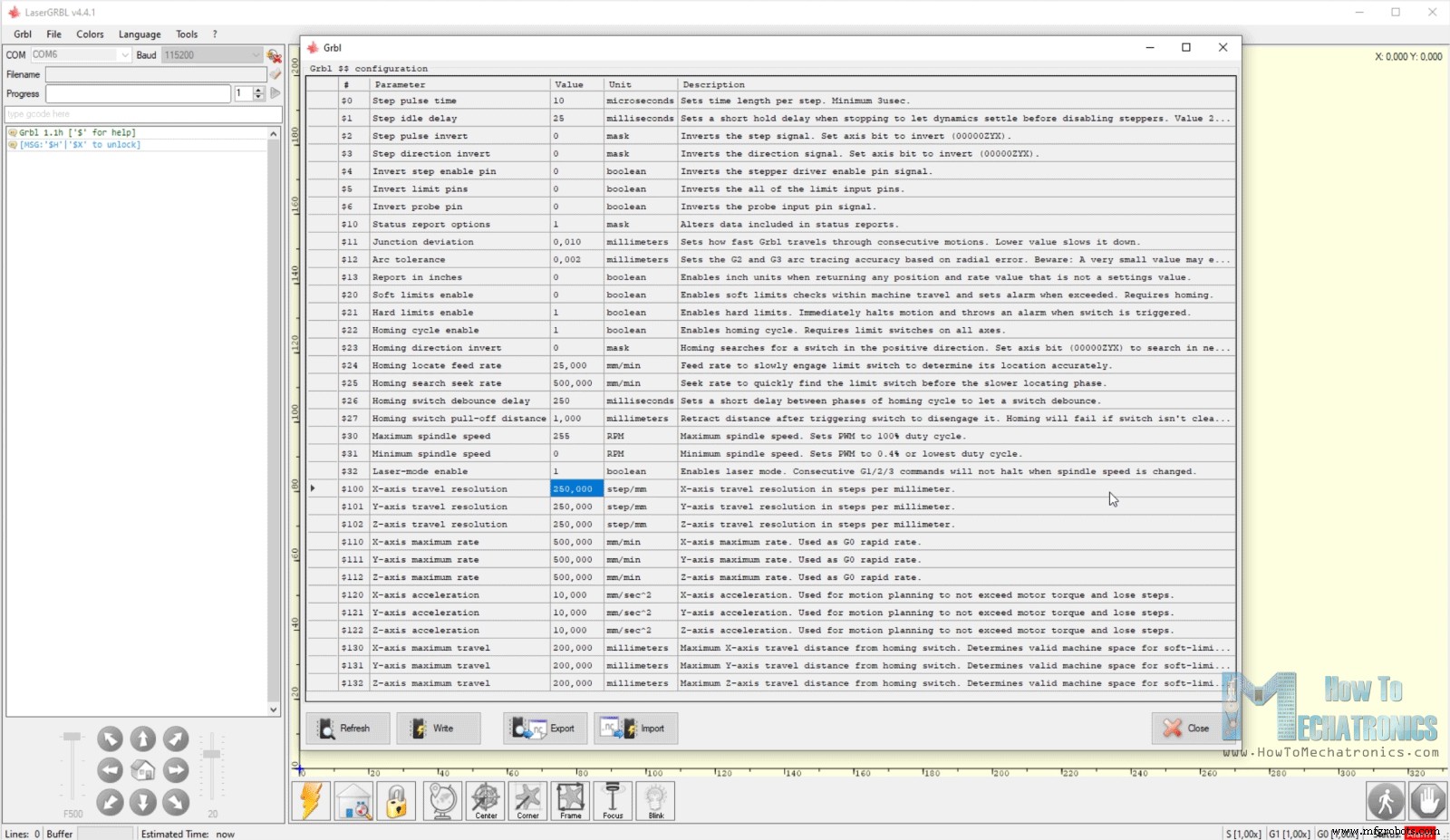
ここで最初に調整する必要があるのは、移動分解能またはX軸とY軸のステップ/mm値です。これらの値は、1mm移動するためにモーターが実行する必要のあるステップ数を示します。これは、使用しているステッピングモーターのタイプ、選択したステップ解像度とモーショントランスミッション(この場合はGT2ベルトとプーリー)によって異なります。
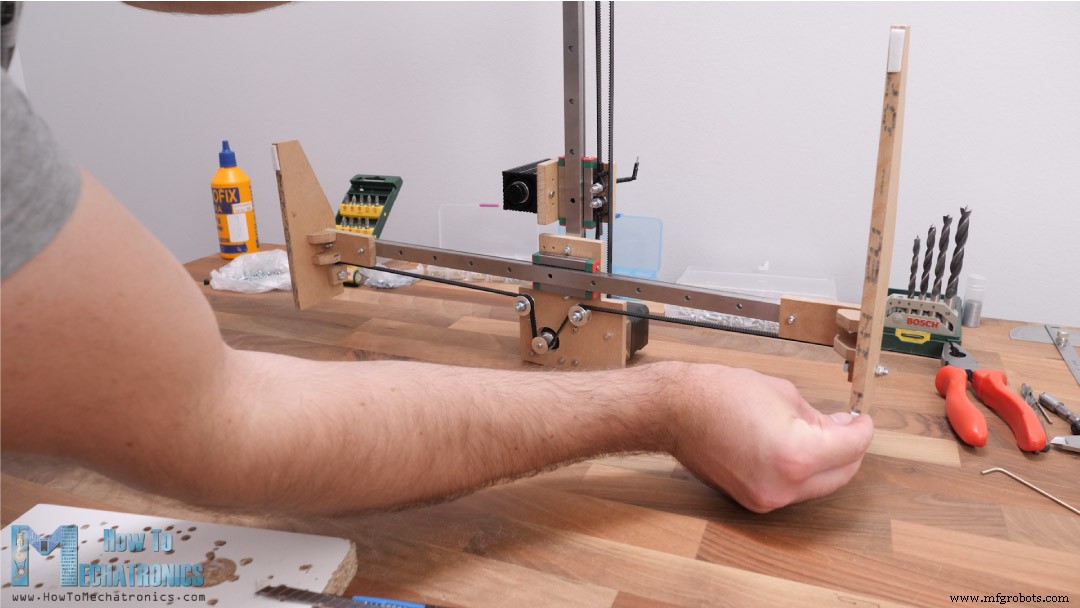
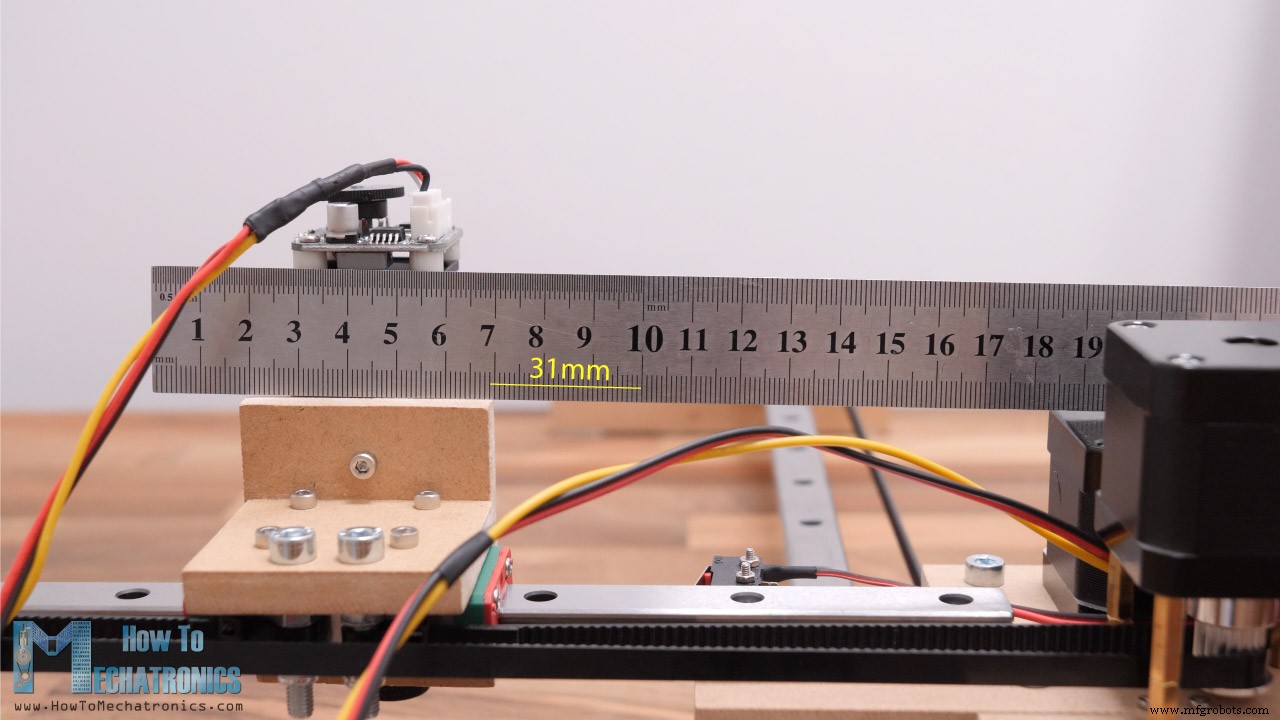
マシンのこれらの値を計算する方法は次のとおりです。ここでのデフォルト値は通常250ステップ/mmです。これで、JOGコマンド(たとえば20mm)を使用してマシンを移動でき、マシンが実際に移動する量に注意する必要があります。
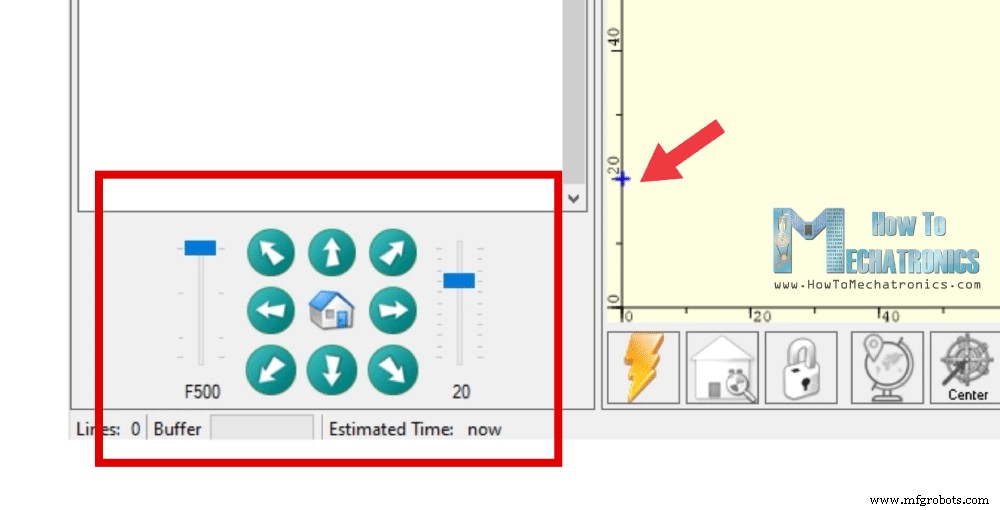
私の場合、Y軸のジョギングが20mmの場合、実際の動きは31mmでした。
したがって、20/31 =0.645であり、その値に250を掛けると、161.29になります。つまり、これがマシンのステップ/mm値として設定する必要がある値です。
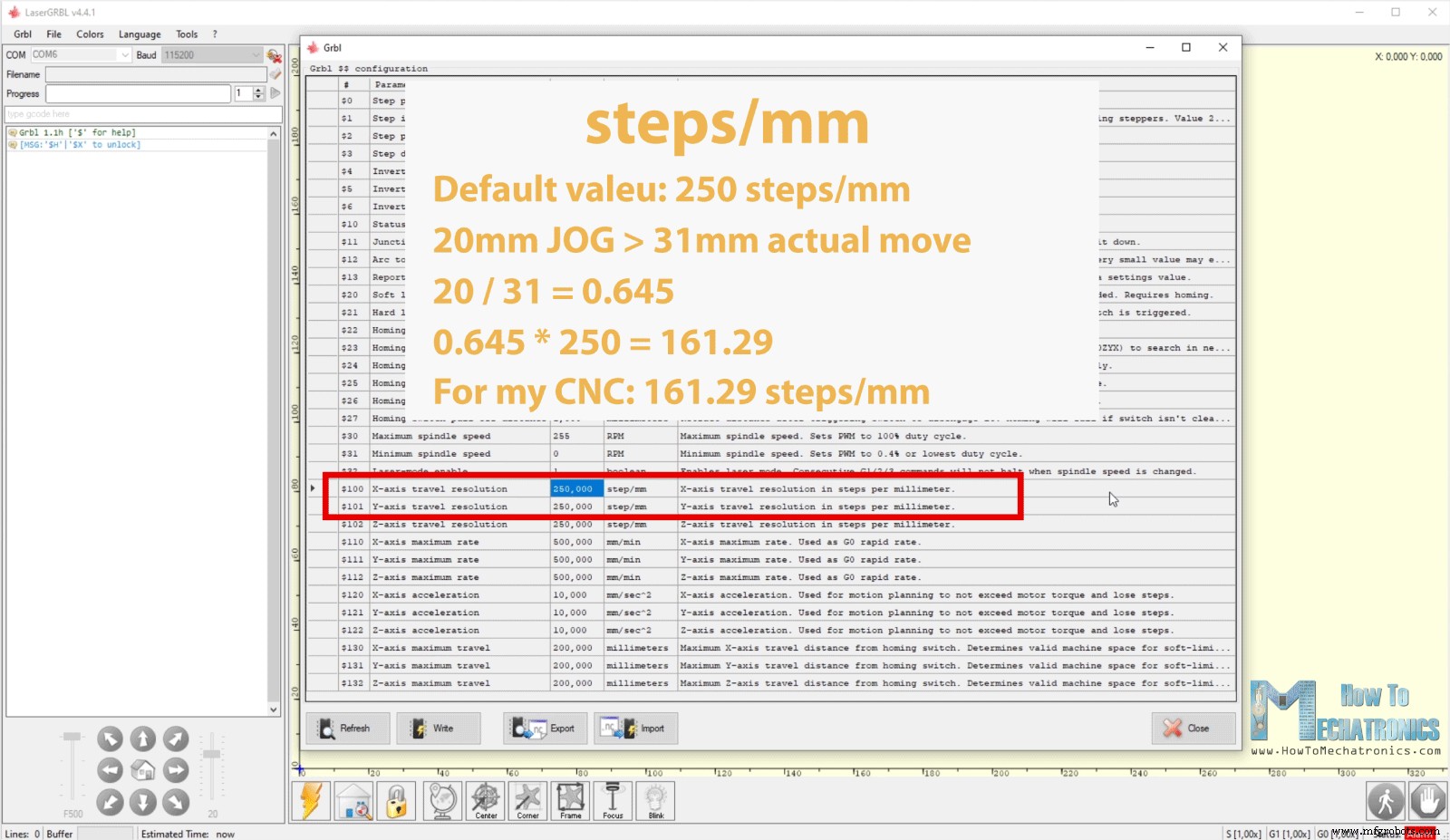
更新された値でマシンを移動しようとすると、マシンは正確な距離を移動するはずです。結果に満足できない場合でも、正方形を描画して測定することにより、これらの値を微調整できます。最終的に160ステップ/mmの値を使用しました。
それでも、調整が必要な他の重要なパラメータもあります。たとえば、実際のリミットスイッチであるハードリミット、作業領域を定義するソフトリミット、マシン上のリミットスイッチの位置を定義するホーミング方向の設定などを有効にする必要があります。
パラメータのセットをダウンロードして、ファームウェアにインポートするだけです。
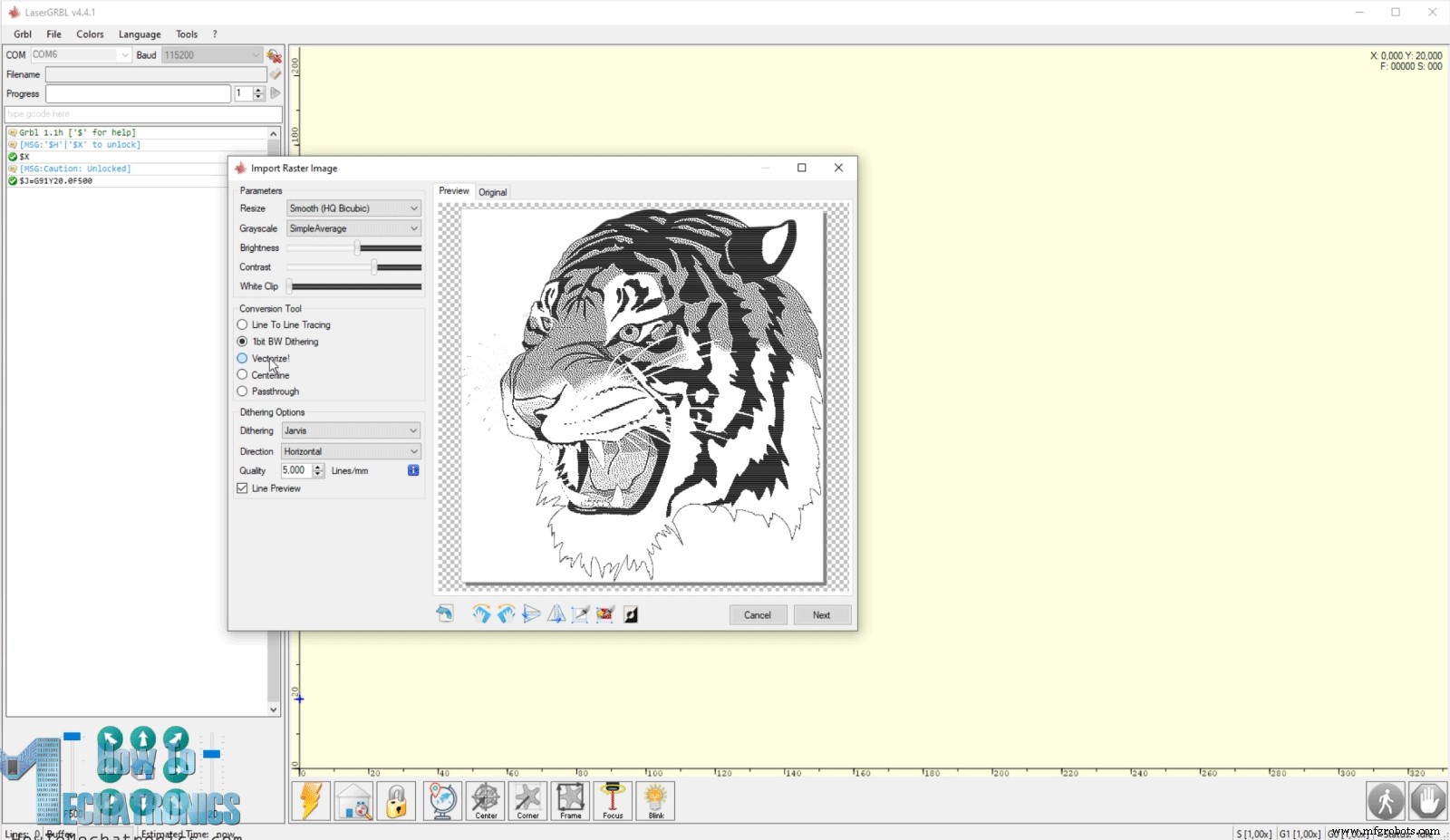
このソフトウェアのもう1つの優れた点は、Gコードジェネレーターが組み込まれていることです。つまり、写真、クリップアート、鉛筆画などをソフトウェアに直接ロードでき、必要に応じて彫刻用のGコードを生成できます。ラスタライズ画像ツールは非常に用途が広く、線から線へのトレース、ベクトル化、1ビットBWディザリングなどを選択するなどの多くのオプションがあります。
もちろん、必要に応じて、Gコードを生成してここにロードするためのInkscapeとそのプラグインInkscape-Lasertoolsなど、他のソフトウェアを使用してGコードを生成することもできます。スカラロボットレーザー彫刻機の前のビデオで、この方法を使用してGコードを生成する方法をすでに説明したので、詳細については、そのビデオをチェックしてください。
次に、LaserGRBLを使用して写真からレーザー彫刻用のGコードを生成する方法を紹介します。ここに犬の写真があります。これをソフトウェアで開きます。
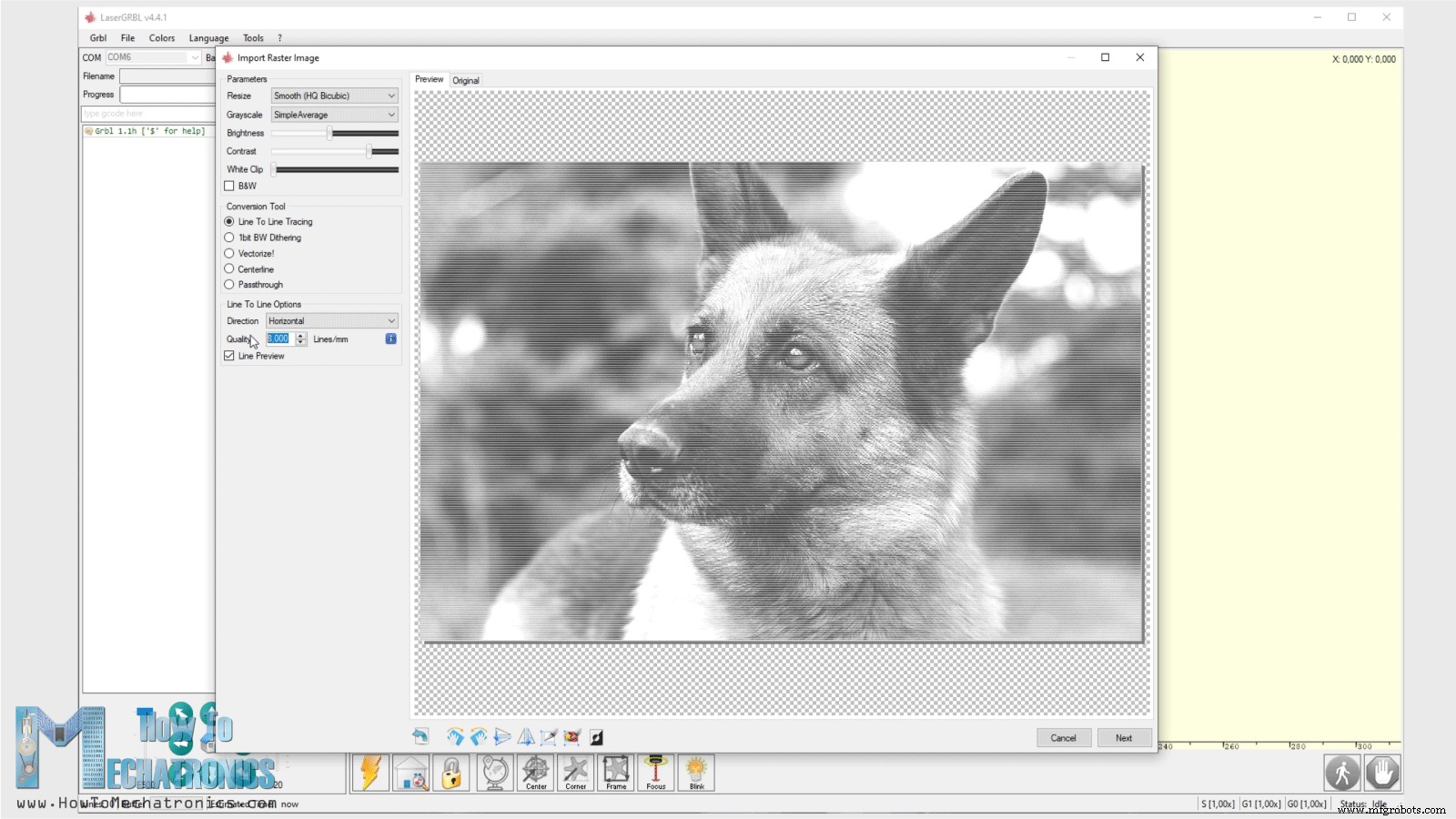
明るさとコントラストのオプションを使用して、画像を希望に合わせて調整できます。写真の変換のタイプを選択できます。たとえば、ライン間トレース、1ビットBWディザリング、またはベクトル形式などです。この写真では線から線へのトレースを使用します。ここでは、線の方向と、1mmあたりの線の数によって定義される彫刻の品質を選択することもできます。
次に、彫刻速度を選択し、レーザー出力の最小および最大PWM値を設定し、彫刻のサイズを設定できます。
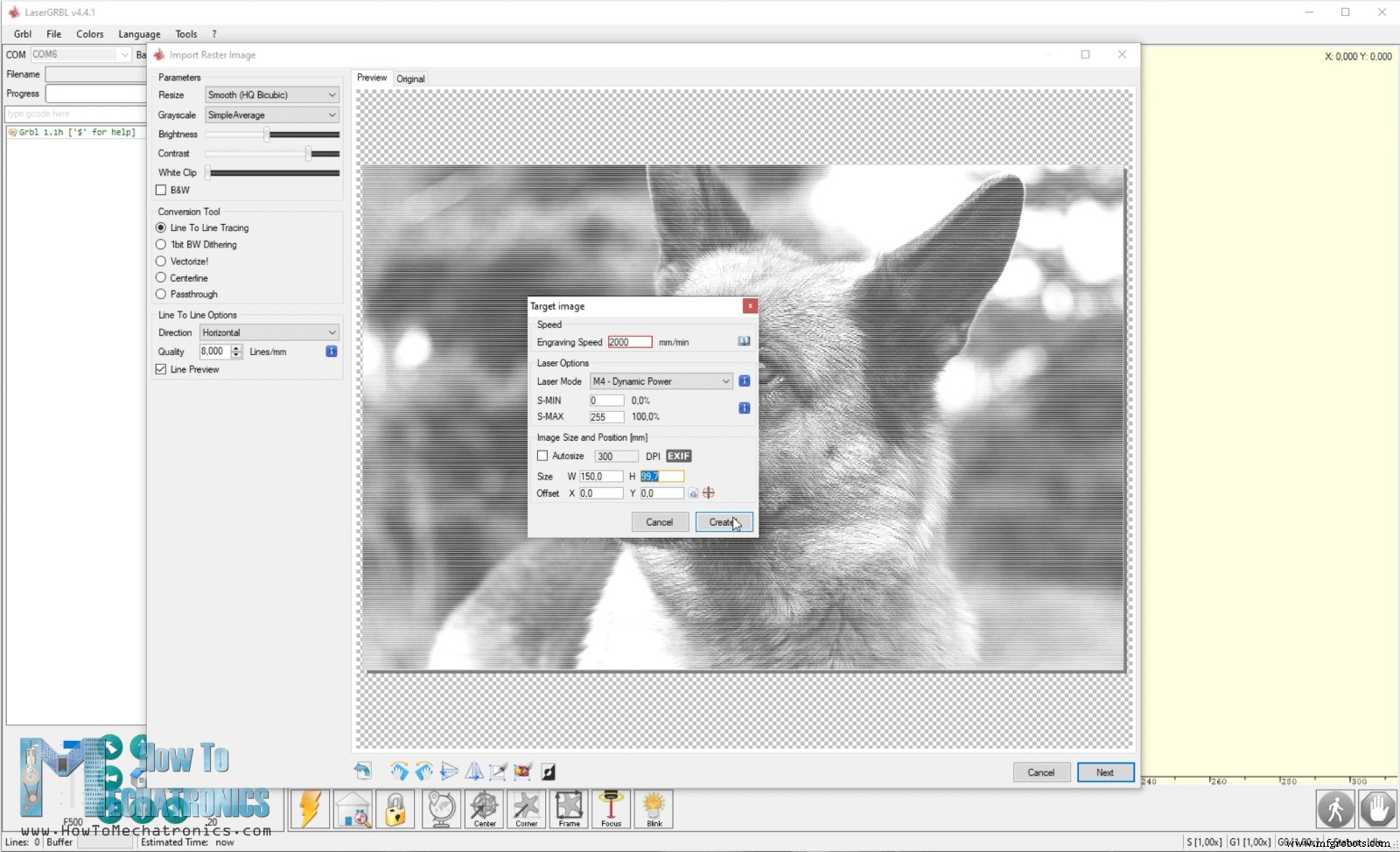
これで、ソフトウェアがこの彫刻用のGコードを生成します。開始する前に、[フレーム]ボタンを使用して、彫刻が行われる場所の概要を示したり、表示したりできるため、必要に応じてワークピースを調整できます。
非常に危険であるため、レーザーの紫外線から目を保護するレーザー安全ゴーグルを使用する必要があることに注意してください。
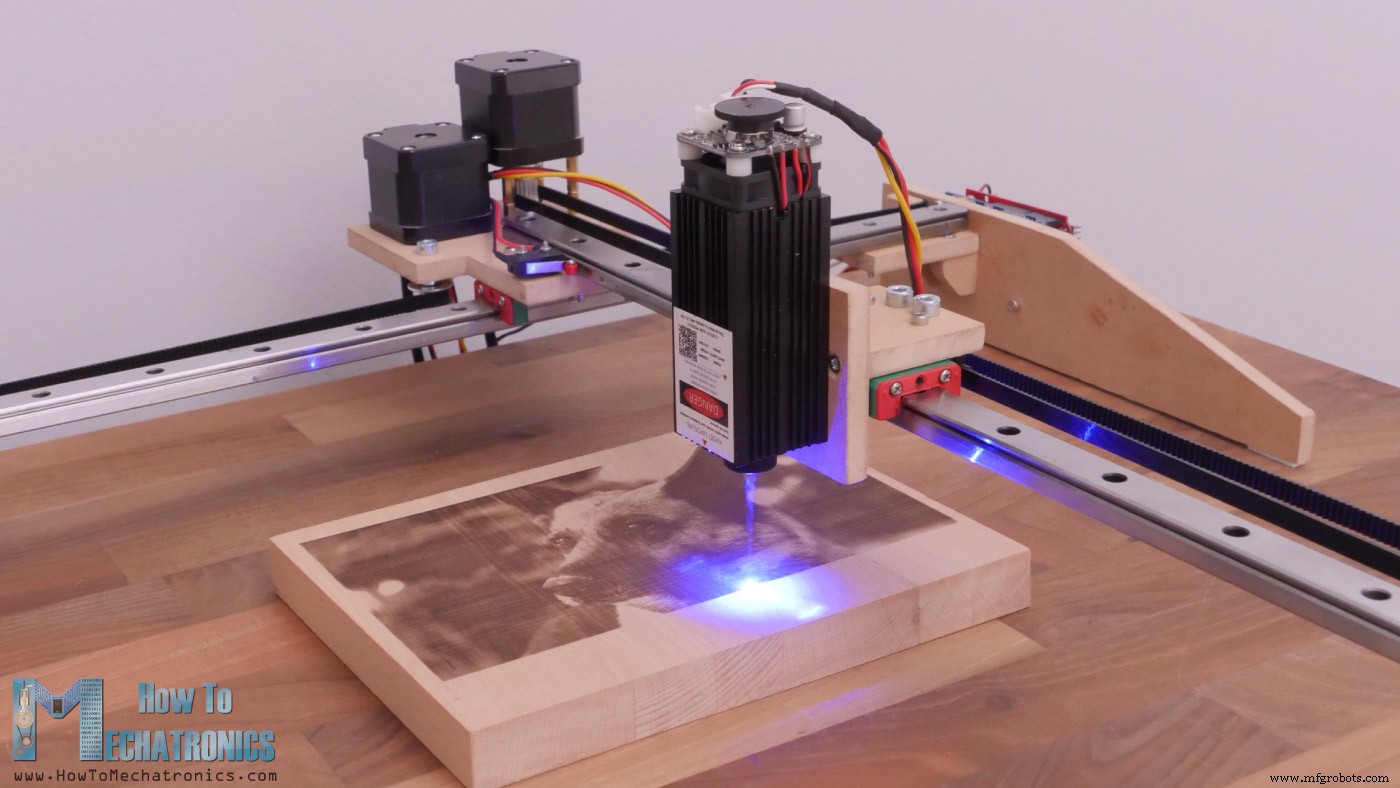
機械を正しく校正すれば、かなり良い彫刻を得ることができます。キャリブレーションには、100%から10%の透明度の正方形を持つ私が作成したこの画像を使用できます。

結果に応じて、レーザー出力の彫刻速度とPWM値を調整します。
ここから、キャリブレーション画像をダウンロードできます:
これで、このチュートリアルは終わりです。あなたがそれを楽しんで、何か新しいことを学んだことを願っています。ご不明な点がございましたら、下のコメントセクションでお気軽にお問い合わせください。他のArduinoプロジェクトも忘れずにチェックしてください。
製造プロセス