


自動ツールチェンジャー付きDIYペンプロッター| CNC製図機
このチュートリアルでは、CNCペンプロッターまたは描画マシンをどのように構築したかを示しますが、1つの優れた機能があり、それがツールの自動変更です。つまり、マシンは自動的に色を変更できるので、本当にクールなものを描くことができます。
次のビデオを見るか、以下のチュートリアルを読むことができます。
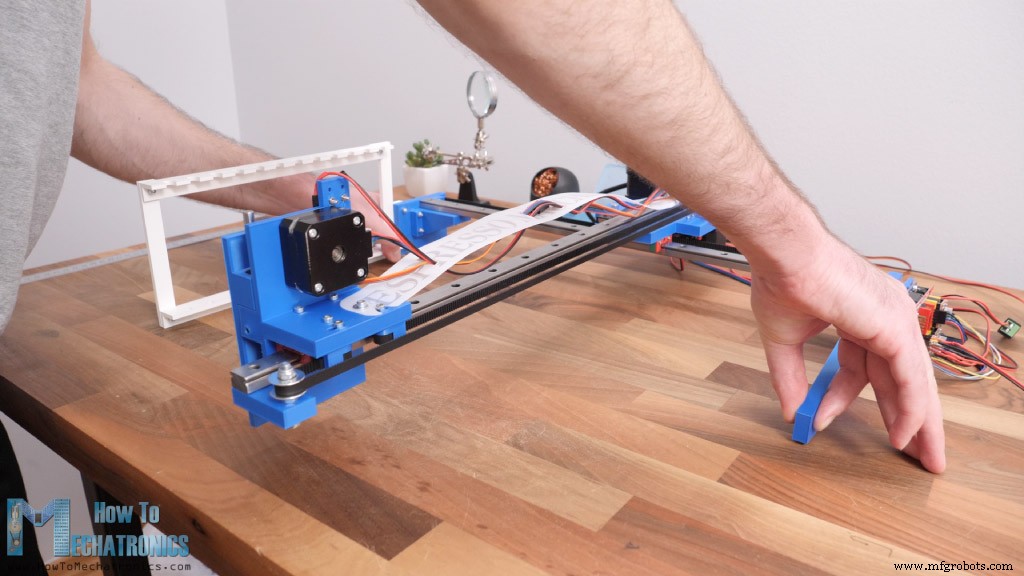
機械の構造は、私の前のビデオのDIY CNCレーザー彫刻機に基づいています。目標は、最小限の部品で最も単純なCNC機械を作ることでした。 X、Y、Z軸の動きに3つのNEMA 17ステッピングモーターを使用し、グリッパーに小さなサーボを使用します。このCNCペンプロッターマシンの頭脳は、CNCシールドと3つのA4988ステッパードライバーを組み合わせたArduinoUNOボードです。
かなり大きな360x280mmの作業領域と、このペンプロッターが出力できる詳細レベルも非常に印象的だと思います。特に0.6mmのジェルペンを使った絵がどれほど上手く正確に描かれているかに実際に驚いていました。
それでも、このような描画マシンの構築について知っておく必要のあるすべてのことを説明します。これには、設計方法、電子機器の接続方法、使用するファームウェアとソフトウェア、Gコードの生成方法などが含まれます。
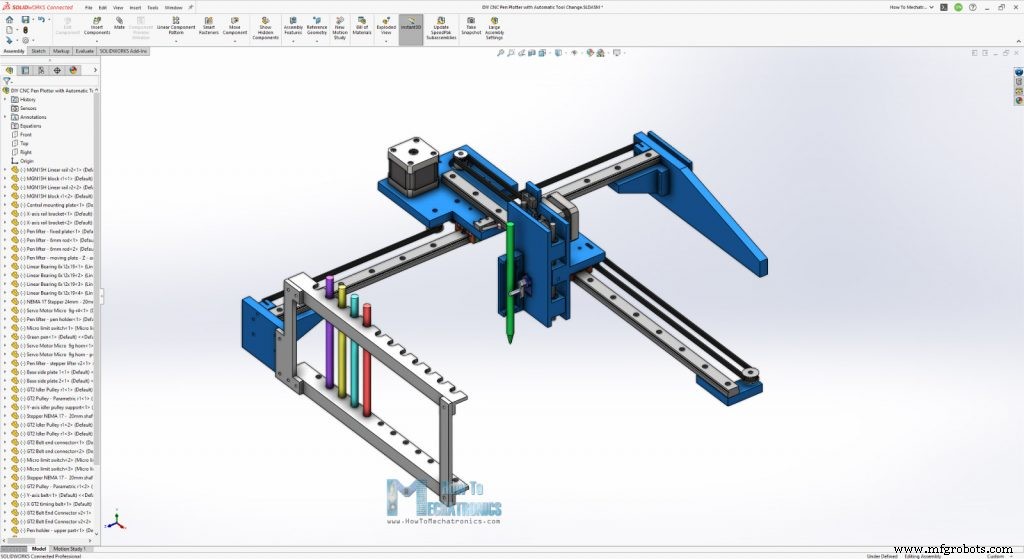
まず、このCNCマシンの設計を見てみましょう。すでに述べたように、このマシンは、最小限の部品で非常にシンプルなCNCを作成することを目的とした、以前のCNCレーザー彫刻機の設計に基づいています。
2つの主要コンポーネントは、MGN15Hリニアレールと適切なスライドブロックです。 X軸とY軸の動きは、2つのGT2ベルトといくつかのGT2プーリーを介して提供されます。 Z軸については、可動部が2本の6mmリニアロッドと適切なリニアベアリング上を上下にスライドする単純な往復運動があります。ペンを握るのに小さな趣味のサーボが使われています。
ペンホルダーには特定の固定位置があるため、このペンプロッターにはホーミング手順が不可欠です。そのため、マシンには開始点が必要です。したがって、軸ごとにリミットスイッチが必要です。
この3Dモデルを見つけてダウンロードしたり、Thangsのブラウザで調べたりすることができます:
Thangsでアセンブリ3Dモデルをダウンロードします。
このチュートリアルをサポートしてくれたThangsに感謝します。
パーツの3Dプリントに使用されるSTLファイルについては、こちらからダウンロードできます:
ペンプロッタの組み立てに必要なすべての部品は次のとおりです。
このDIYCNCマシンを組み立てるために必要なコンポーネントのリストは次のとおりです。電子部品のリストは、以下の記事の回路図セクションにあります。
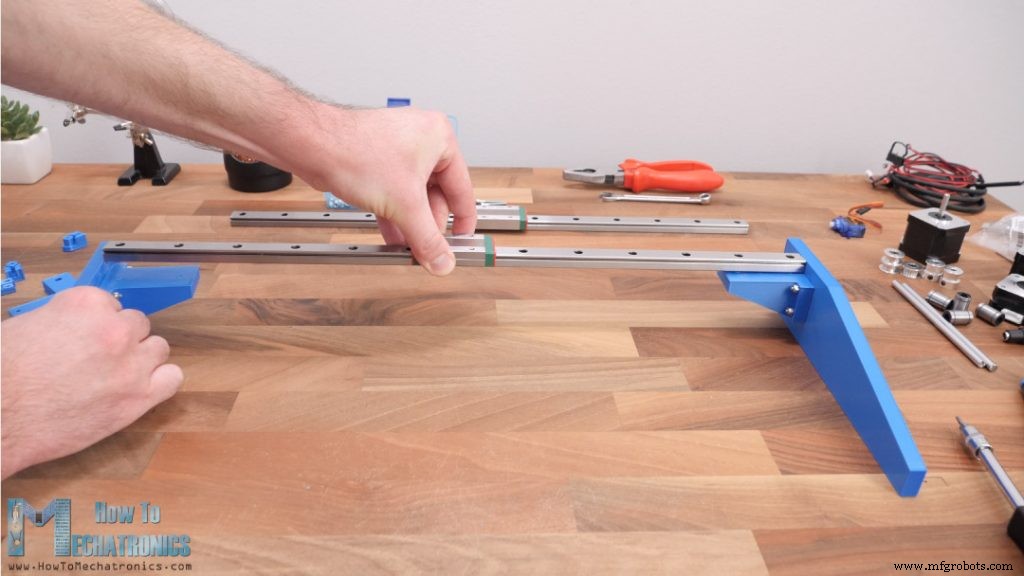
さて、これで機械の組み立てを開始できます。まず、M3ボルトを使って、リニアレールのベースプレートとブラケットを固定しました。この機械を組み立てるためのすべてのボルトは、GT2プーリーに必要ないくつかのM5ボルトを除いて、実際にはさまざまな長さのM3です。
両側の準備ができたら、両側に2本のボルトを使用してX軸リニアレールを固定できます。これらのMGN15Hレールは、スライドブロックの内部にボールまたはローラーがあるため、非常にスムーズで自由な動きを提供します。
ただし、正しく機能させるために、取り付ける前に、きれいにグリースを塗っておくことをお勧めします。
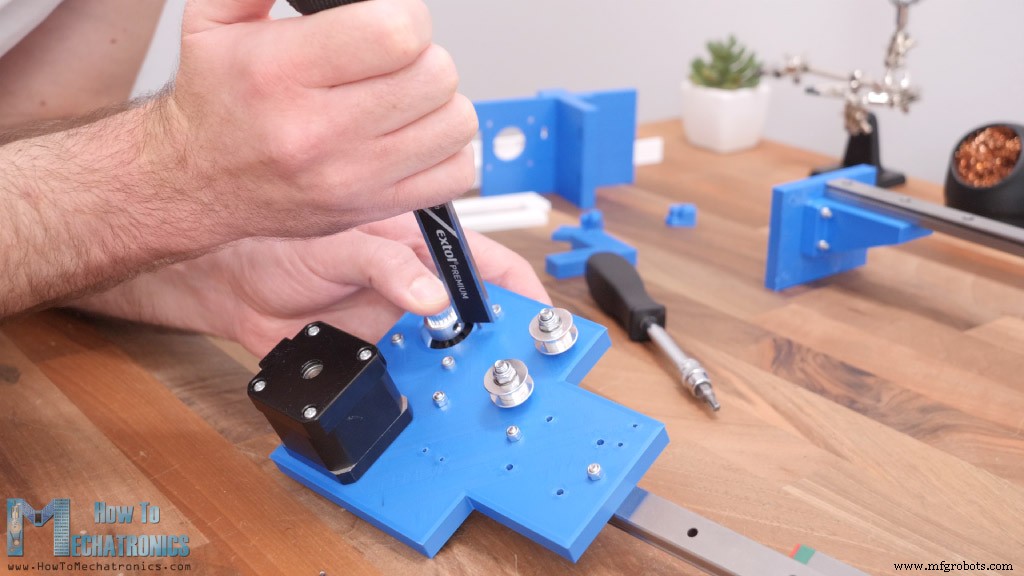
次に、Y軸レールはX軸スライディングブロックの上に配置する必要があり、それらを一緒に固定するために、中央の取り付けプレートを使用します。まず、3本のボルトを使用してY軸レールを中央プレートに取り付けることができます。
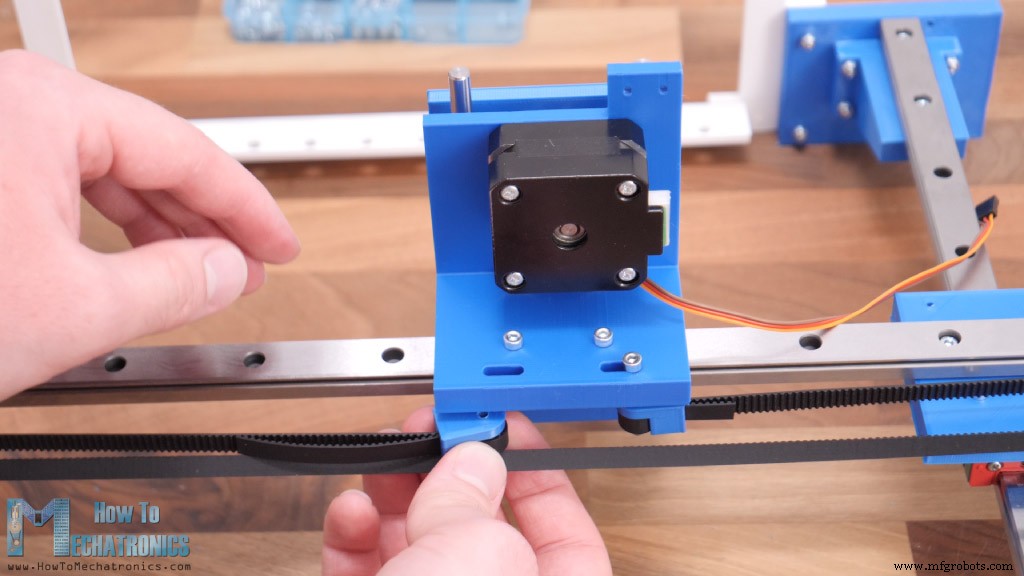
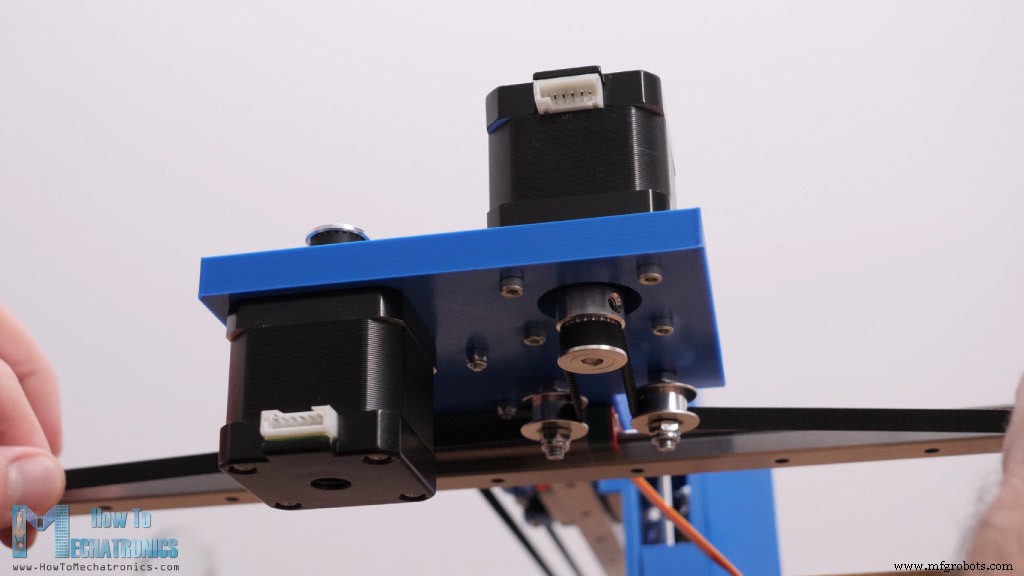
次に、2つのNEMA17ステッピングモーターを取り付けることができます。 1つはプレートの上面に、もう1つはプレートの下面に配置されます。先に述べたように、GT2プーリーを所定の位置に取り付けるためにいくつかのM5ボルトとナットが必要です。ここでの2つのプーリーは、実際にはX軸GT2ベルトのグリップを提供するために使用されるアイドラープーリーと、ステッピングモーターに接続する歯付きプーリーです。
そのプーリーの取り付けに関しては、アイドラープーリーに従って測定し、水平にする必要があります。 Y軸については、この軸のベルトがループ状に取り付けられるため、レールの反対側にあるアイドラープーリーが1つだけ必要です。
さて、次は結婚か、2つの軸をつなぐことです。これを行うには、4本のM3ボルトを使用して中央プレートをX軸スライディングブロックに固定します。これにより、機械は主な形状になり、Y軸スライディングブロックは作業領域の任意の位置に到達できるようになりました。
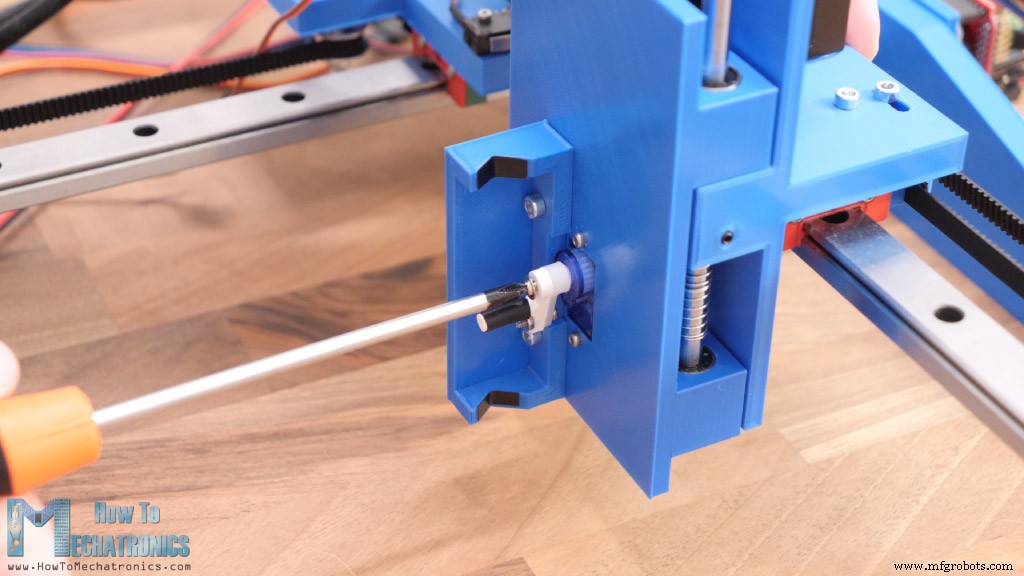
これで、ペンリフターメカニズムの組み立てを続行できます。このメカニズムは2つの部分で構成されています。1つはY軸スライディングブロックにボルトで固定され、もう1つは上下にスライドします。固定部分が固定されたら、Z軸ステッピングモーターを取り付けることができます。このステッパーもNEMA17ですが、重量を減らすために40mmではなく23mmと短くなっています。
次に、ステッパーのシャフトに取り付けるだけのリフターを取り付けることができます。持っていたグラブネジが少し長かったので、リフターをシャフトに取り付けましたが、穴がシャフトの形をしていて、動きがよく伝わります。私は実際にこの部分を少し変更することになりましたが、ダウンロードファイルで更新されたバージョンを取得する心配はありません。
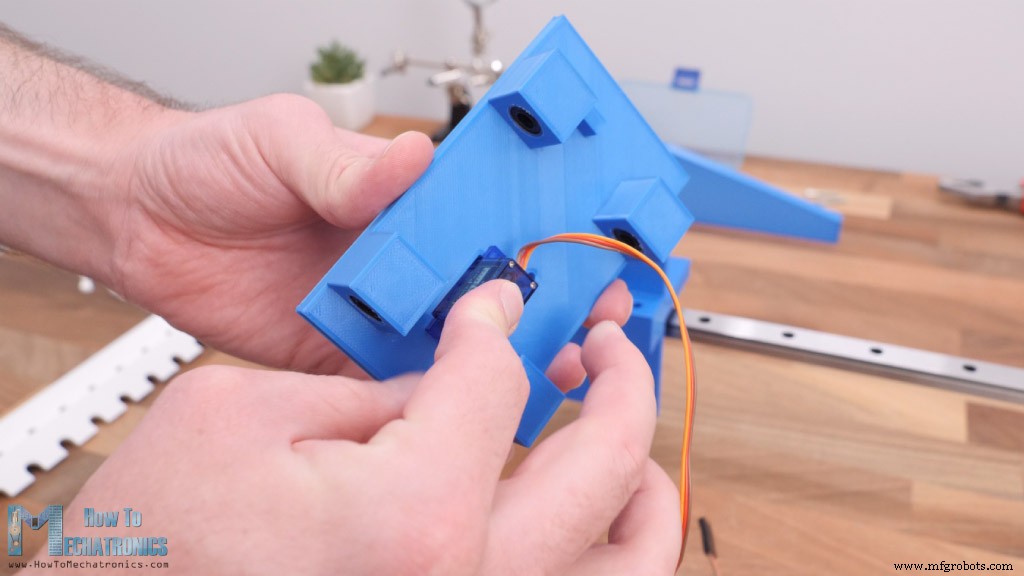
次に、4本のリニアベアリングをスライド部に挿入し、マイクロサーボを固定しました。次に、サーボのすぐ隣にペンホルダー部分も固定しました。
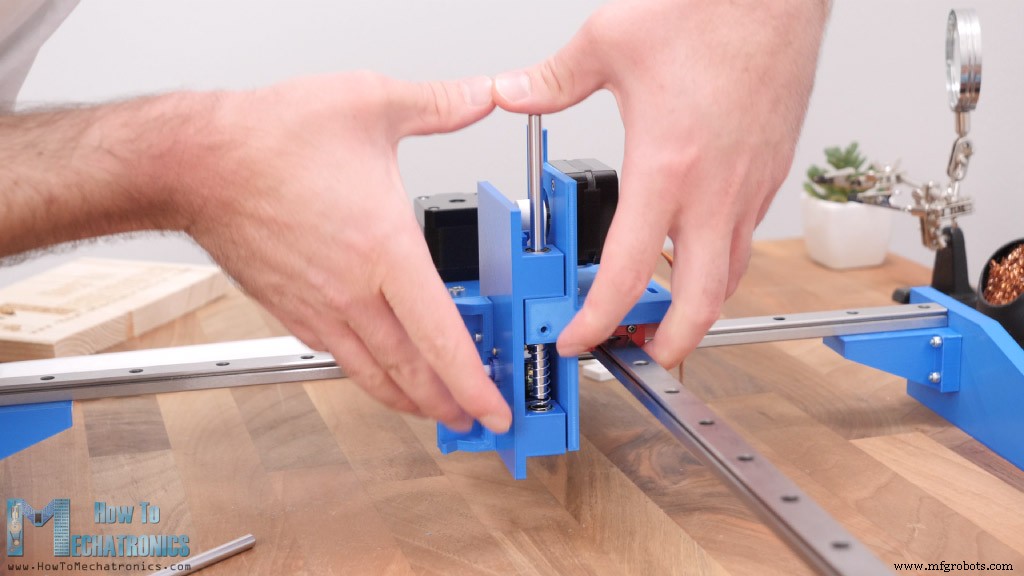
固定部とスライド部を接続するには、まず固定部の穴にサーボワイヤーを通し、次にベアリングと固定部の穴に上から6mmのロッドを挿入する必要があります。このロッドを取り付ける際には、固定部分とスライド部分の間に、スライド部分を押し下げるようにスプリングを挿入する必要があります。
これにより、ペンが作業面とよりよく接触するようになります。固定部の下側には、M3ナットを挿入して6mmロッドを固定するための開口部があります。
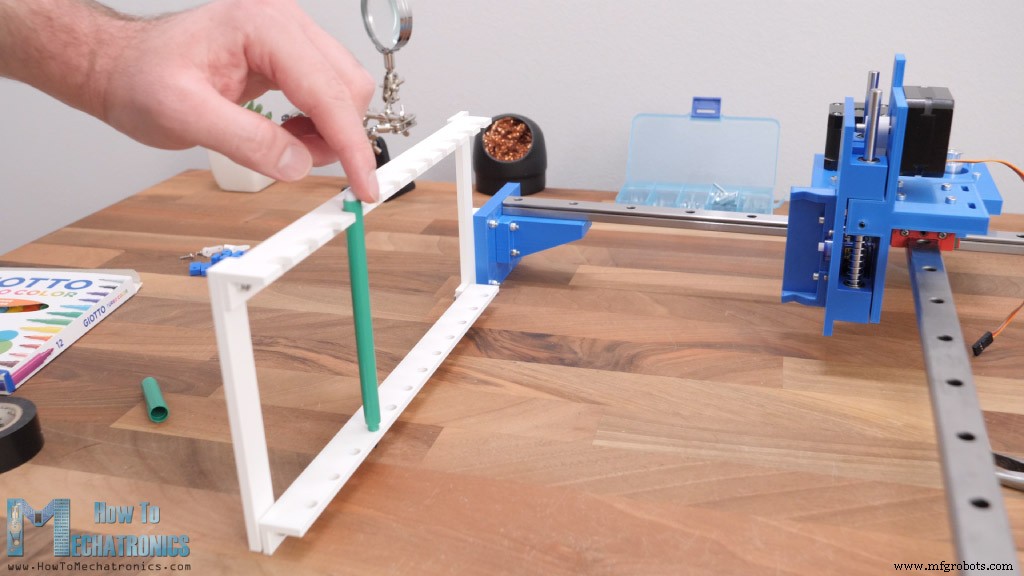
次に、本機の片側にあるペンホルダーユニットを組み立てます。上部と下部で構成され、最大12本のペンを収納できる開口部があります。
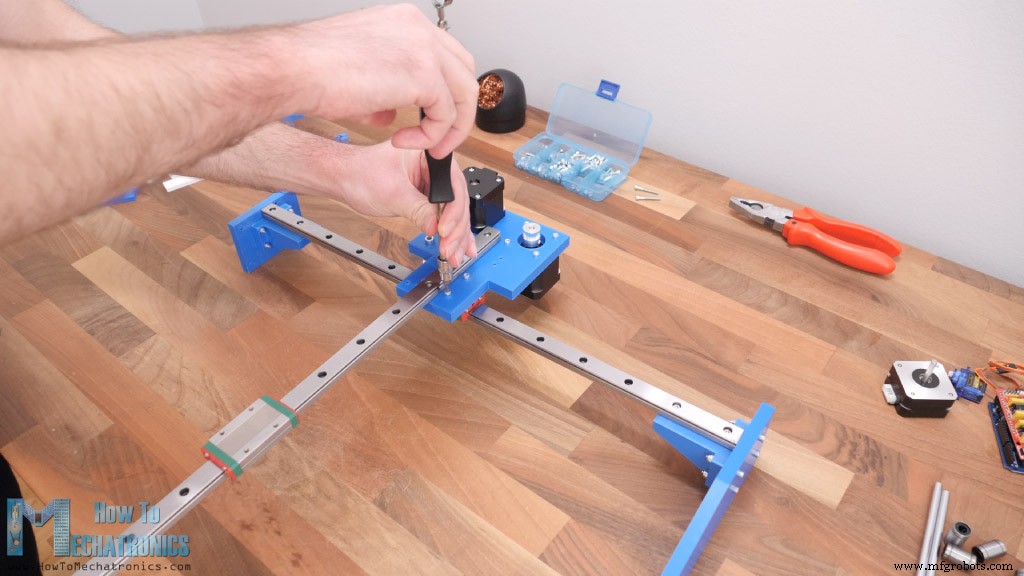
ベルトの取り付けを続けました。まず、必要な長さを測定し、おおよそのサイズにカットする必要があります。ベルトをスライディングブロックに取り付けるために、これらのクールなベルトコネクタを作成しました。ベルトは中空のシャフトの周りを回り、ベルトが動かないように2つの壁の間にあります。
M3ボルトを使用して、ブロックの片側に最初のコネクタを固定し、反対側にも同じ手順を繰り返すことができます。ここでこれらのスロットに沿ってコネクタを移動できるので、ベルトに必要なだけ張力をかけます。
X軸に関しては、ベルトは一方の側からもう一方の側に直線で移動し、ステッピングモーターのプーリーに張力またはグリップを提供する方法でプーリーを通過します。
X軸ベルトに張力をかけるために、ベルトの形をしたこれらのコネクタを作成したので、マシンの側面にそれらを締めることができます。
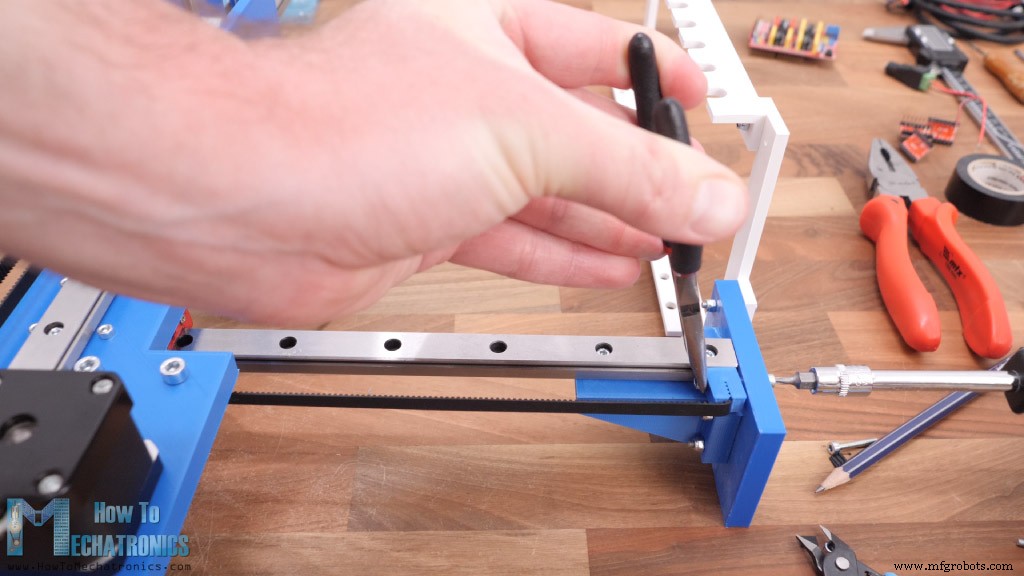
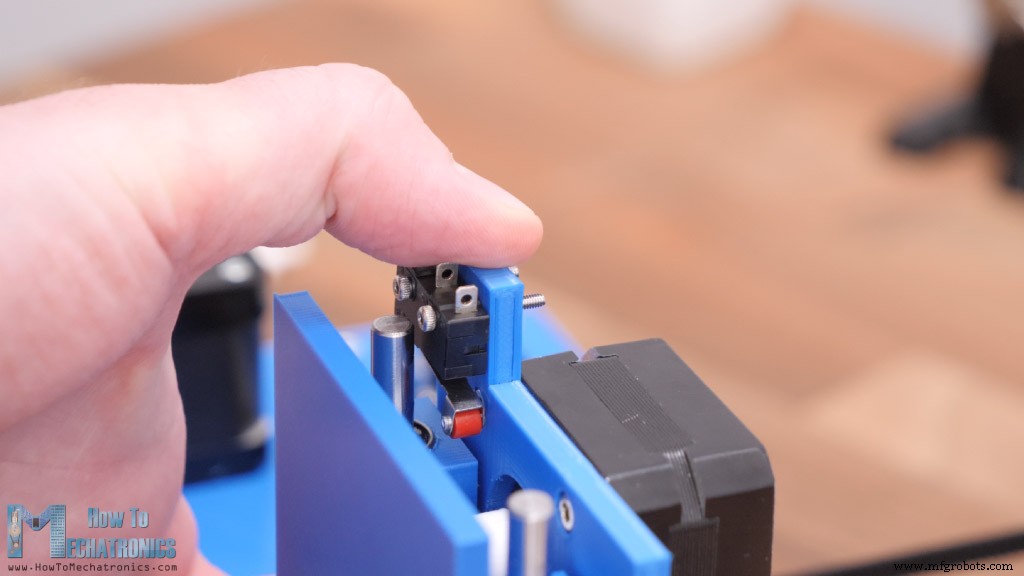
次に、リミットスイッチを取り付けます。
実際、このZ軸のリミットスイッチを少し下げることになりました。XとYのリミットスイッチについては、以前のプロジェクトで既に配線が接続されているものを使用しました。
これで、機械の機械部分の準備が整い、電子機器の接続に進むことができます。
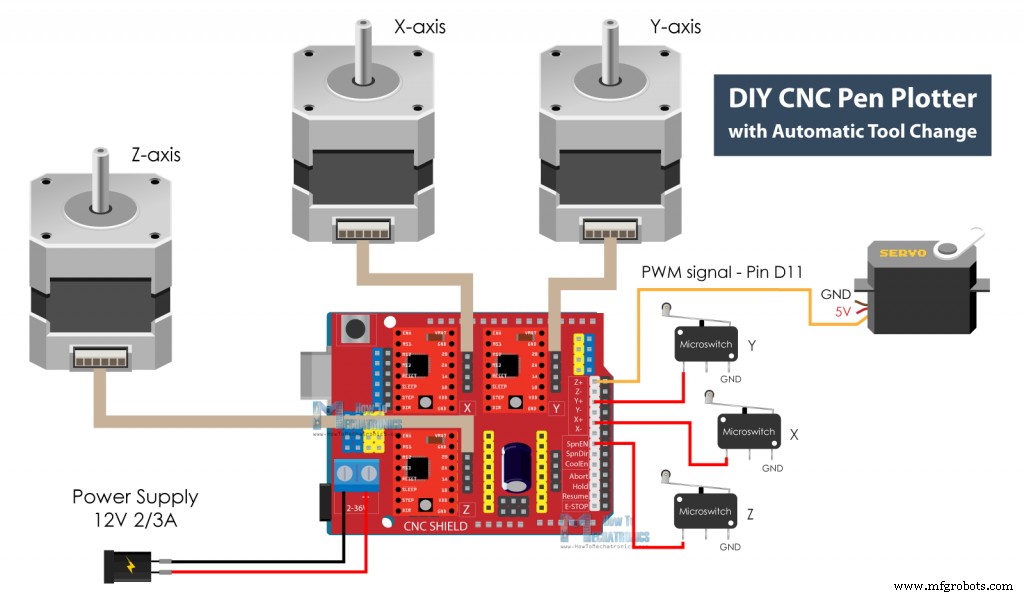
前述したように、ArduinoUnoボードをCNCシールドと3つのA4988ステッパードライバーと組み合わせて使用しています。
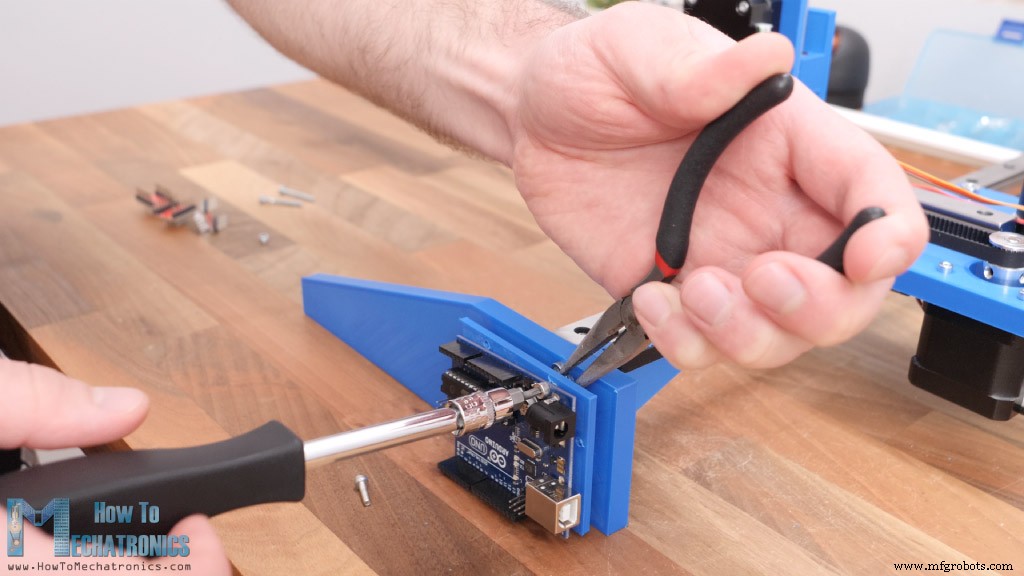
Arduinoボードをマシンに取り付けるために、サイドパネルに追加の3Dプリントパーツを作成しました。 Arduinoボードを2本のM3ボルトで固定し、その上にCNCシールドを挿入しました。
ここでは、16
th
を選択するために、ステッパードライバーごとに3つのジャンパーを挿入する必要があります。 / stepresolution、次にステッパードライバーを挿入します。
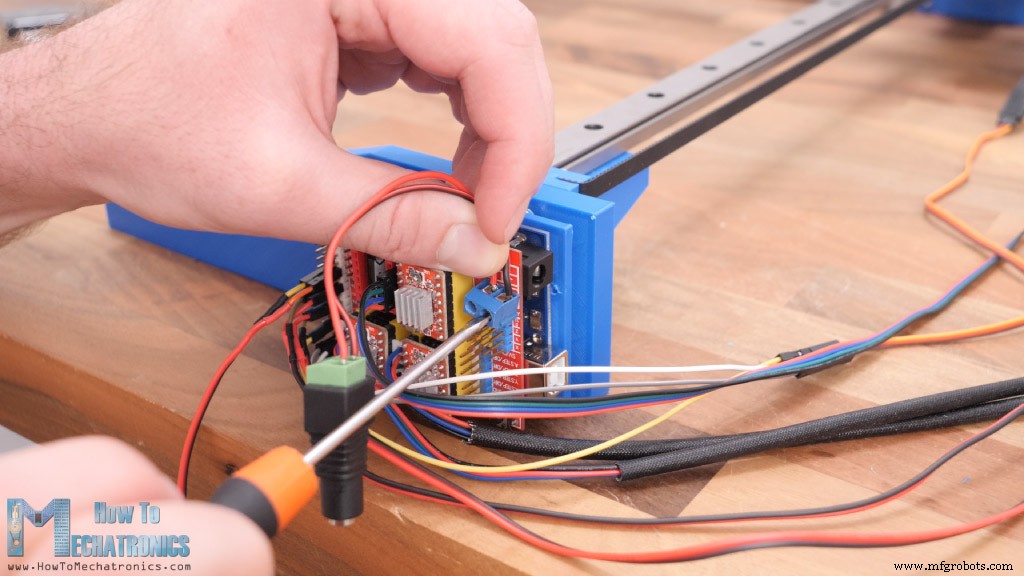
次に、モーターをCNCシールドに適切に接続できます。マイクロリミットスイッチを所定の位置に接続するために、私はそれらに直接ワイヤーをはんだ付けし、反対側ではいくつかのジャンプワイヤーからそれらを入手したメスのピンヘッダーをはんだ付けしました。
サーボモーターはCNCシールドに届くようにサーボ延長ケーブルを使用しました。マシンに電力を供給するために、12Vの電源が必要です。これは、すべてを接続する必要がある方法の回路図です。
これが、すべてを接続する必要がある方法の回路図です。
このプロジェクトに必要なコンポーネントは、以下のリンクから入手できます。
そのため、ArduinoUNOボードをCNCシールドと3つのA4988ステッパードライバーと組み合わせて使用しています。機械をホーミングするための3つのマイクロリミットスイッチと、グリッパーメカニズム用の小さなサーボモーターがあります。電力を供給するために、2アンペアの最小電流レートの12v電源が必要です。
このペンプロッタを完成させるために行う必要のある最後の仕上げはほとんどありません。ここでは、サーボホーンを介してサーボモーターに取り付けるだけのペングリッパーを取り付けています。
ペンリフターからのケーブルの管理には、しっかりしているがしなやかなダイニングテーブルマットを使用したので、仕事にぴったりでした。
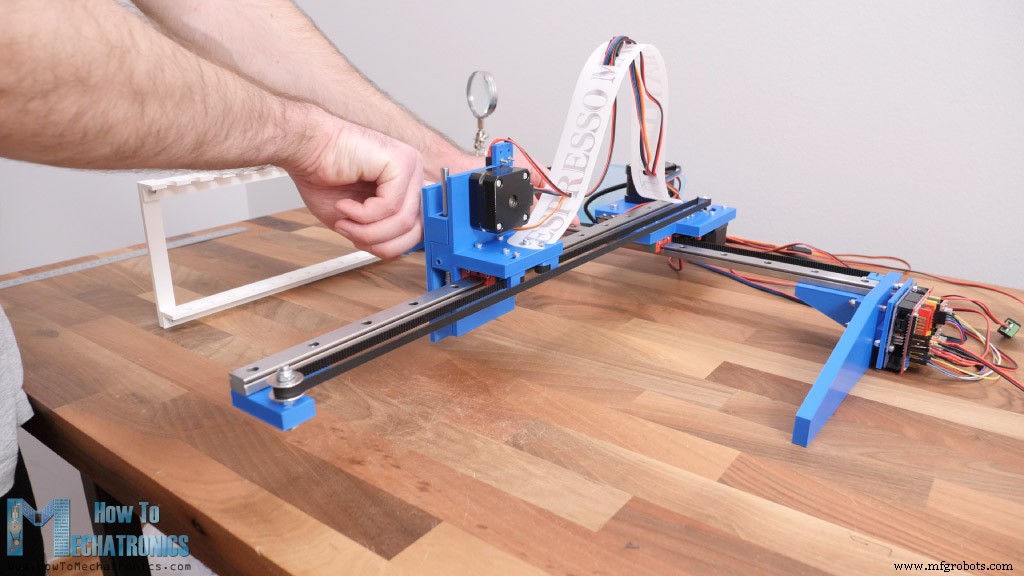
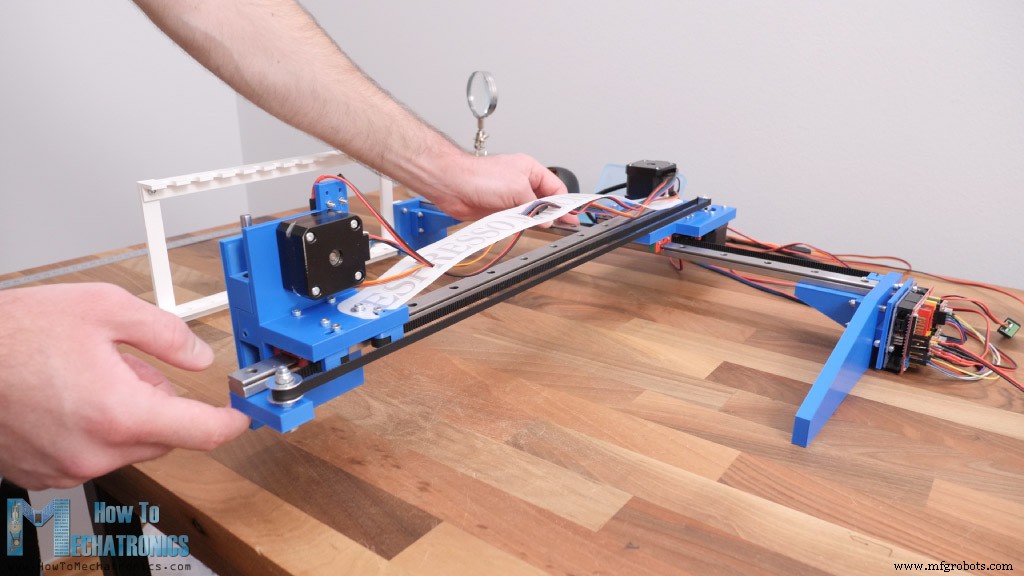
これで私たちの製図機が完成しました。ただし、ここで注意しなければならないことがいくつかあります。 Y軸レールは片側でサポートされておらず、3D印刷PLA素材自体はそれほど剛性がないため、完全に伸ばすと、ペンリフターはサポートされている側に比べて4mm低くなりました。
それはあまりにも多くの遊びですが、私はマシンの前面を少し持ち上げることでその問題を解決することができました。このようにして、差を約1mmに減らしました。これは許容範囲です。これらの大きなレールを使用する場合は、反対側のY軸レールもサポートすることを強くお勧めします。
もう1つの問題は、ペンホルダーです。これは、ペンがこのように適切な位置に留まらないためです。ここでは、上部の開口部を大きくし、側面に柔らかい素材を追加して、ペンが所定の位置に留まり、マシンがペンを挿入しやすいようにすることをお勧めします。
最後に、機械全体の下にボードを挿入して、平らな面を作ることができます。
これで、マシンは完成しました。
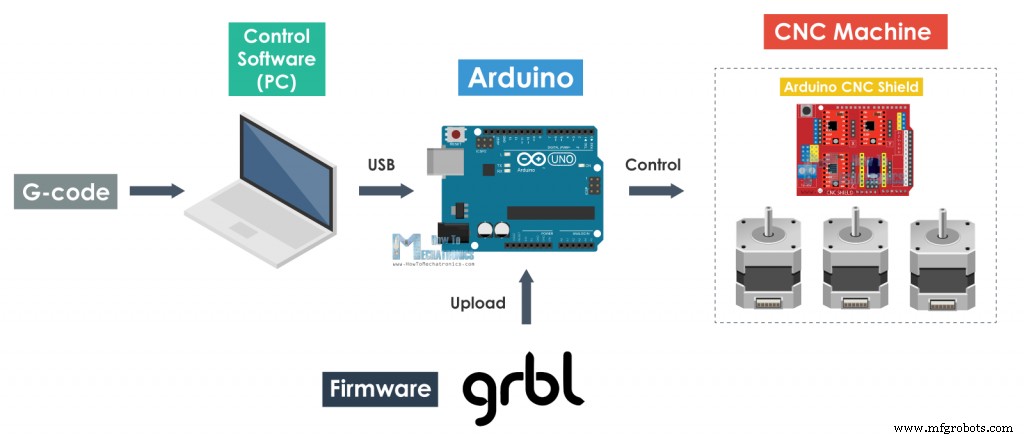
今やるべきことは、それに生命を与えるか、それを本物のCNCマシンにすることです。そのためには、CNCマシンの動きを制御するためのファームウェアをArduinoにインストールする必要があります。また、Gコードを送信し、マシンに何をすべきかを指示する制御ソフトウェアが必要です。
DIY CNCマシンで最も人気のある選択肢は、オープンソースのGRBLファームウェアです。ただし、このペンプロッタには、サーボモーターを制御できる修正バージョンが必要です。この修正バージョンは「grbl-servo」と呼ばれ、スピンドル制御ピン(またはデジタルピン番号11)のデフォルトのPWM周波数を1kHzからこのタイプのサーボモーターの制御に必要な50Hzに変更します。
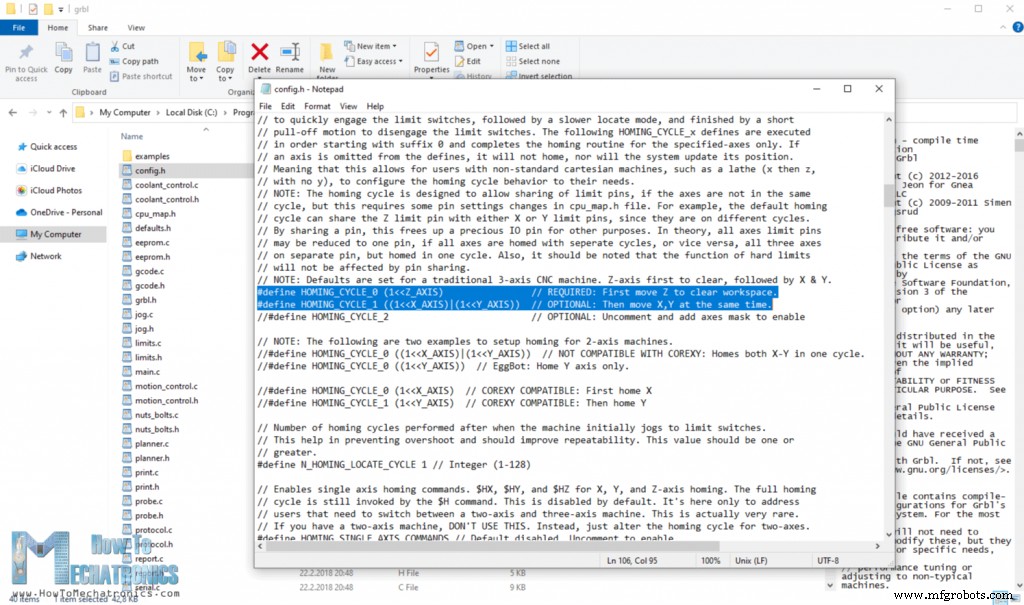
このGRBLファームウェアをダウンロードしてArduinoIDEのライブラリフォルダにインストールしたら、デフォルトの2軸ホーミングではなく、3軸ホーミングを有効にするためにconfig.hファイルも変更する必要があります。
制御ソフトウェアについては、プロッタの制御専用で、画像やグラフィックからGコードを生成できるグラフィックコンバータを搭載したGRBL-Plotterを使用します。これもオープンソースソフトウェアであり、Githubからダウンロードできます。
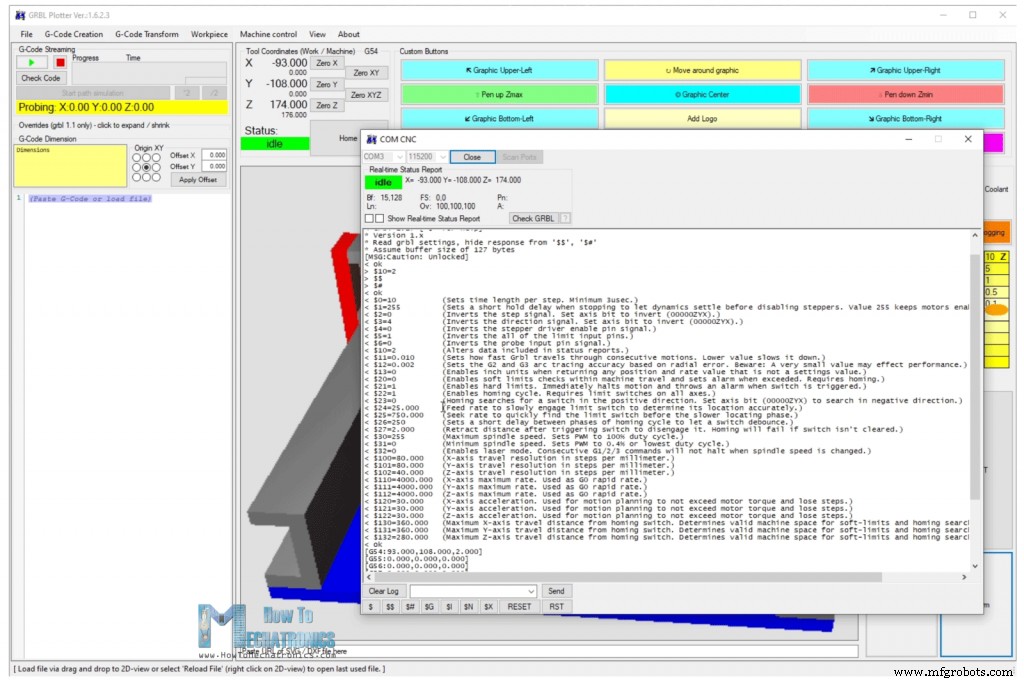
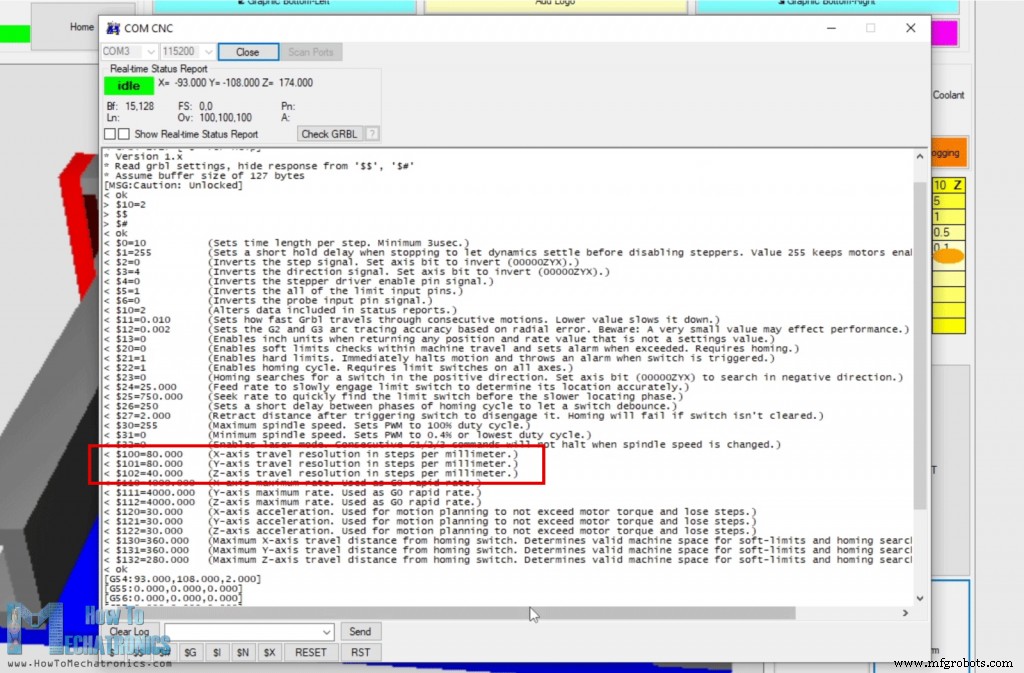
ここで最初に行う必要があるのは、適切なCOMポートを介してArduinoボードをソフトウェアに接続することです。 「KillAlarm」ボタンをクリックすると、シリアルモニターに現在のGRBLパラメーターのリストが表示されます。これらのパラメータのいくつかは、マシンに応じて変更する必要があります。
ここで最初に調整する必要があるのは、移動分解能またはステップ/mm値です。これらの値は、1mm移動するためにモーターが実行する必要のあるステップ数を示します。これは、使用しているステッピングモーターのタイプ、選択したステップ分解能とモーショントランスミッション、この場合はGT2ベルトとプーリーによって異なります。
私たちのマシンでは、X軸とY軸を正確にするには、80ステップ/mmの値が必要です。 Z軸については、実際のモーションでは正確ではない40の値を設定しましたが、往復モーションではとにかくそれを達成することはできません。
また、パラメータ番号23を0に設定して、リミットスイッチの位置を示し、最大送り速度、加速度、最大移動速度を設定し、パラメータ番号1を255の値に設定して、ステッパーをすべてアクティブに保つ必要があります。時間。ただし、これを有効にすると、特にZ軸ステッパーの場合、短いNEMA 17ステッパーはすぐに熱くなる可能性があるため、A4988ドライバーの電流制限を最小に調整する必要があることに注意してください。
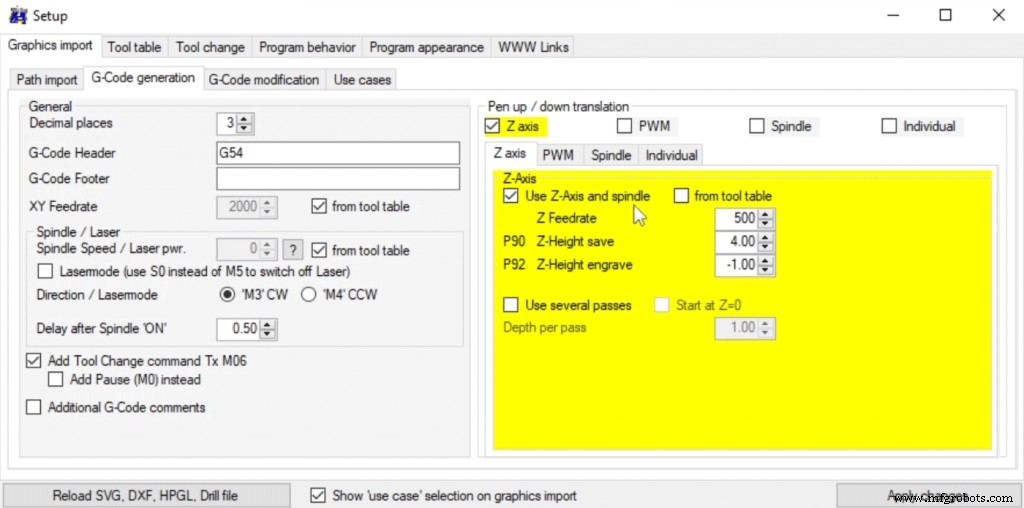
では、コントローラーのセットアップを見てみましょう。ここで調整するオプションは非常に多いため、最初は少し怖いかもしれません。ここでは、最初にペンの上下の移動をZ軸に設定し、上下の位置の値を設定する必要があります。
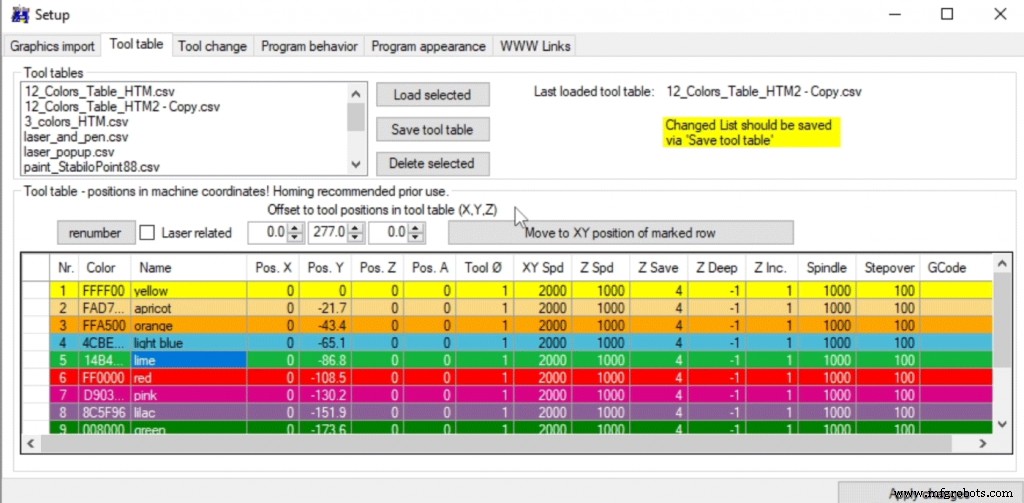
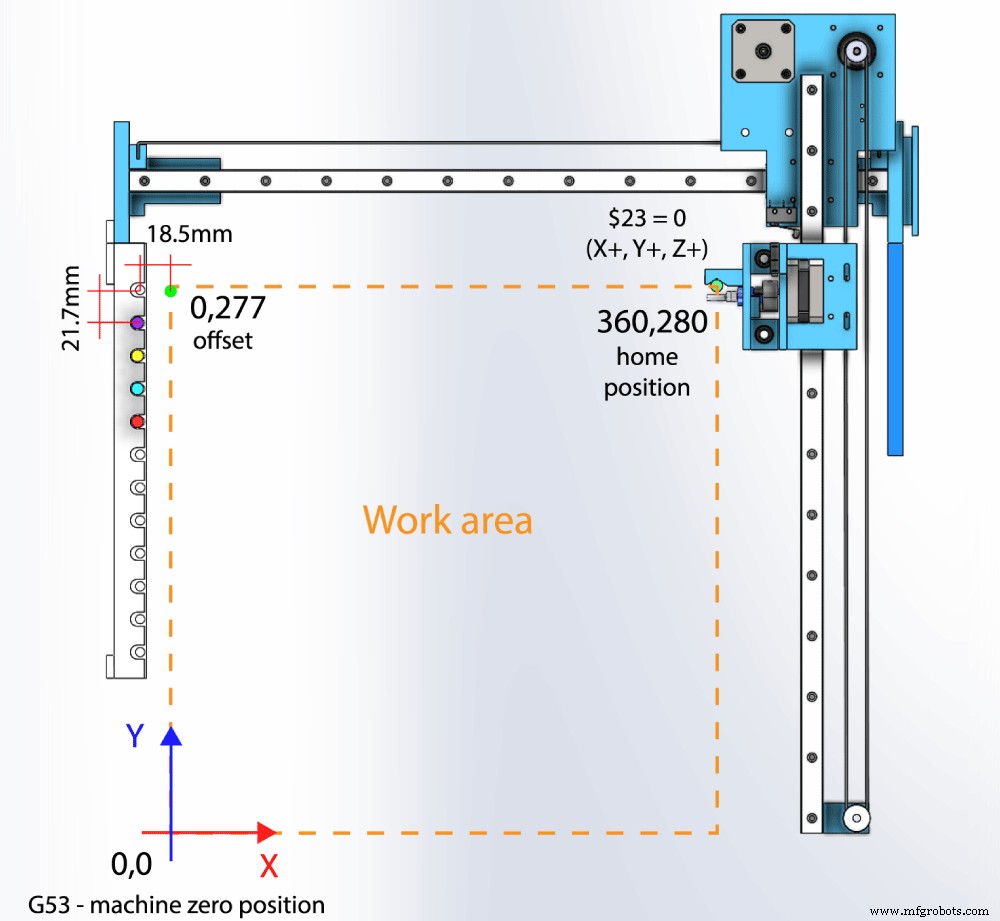
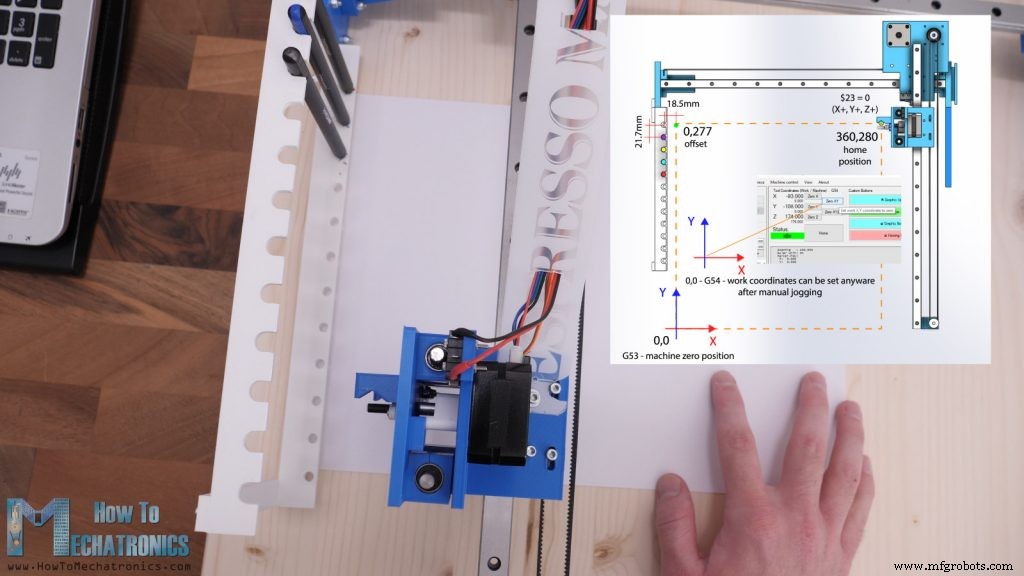
[ツールテーブル]タブで、ペンの色と位置を定義できます。ここで、これらの値はG53またはマシン座標系のものであることに注意してください。これは、マシンが持つハードリミットスイッチと、以前にGRBLパラメータで設定した最大移動量によって定義されることを意味します。
各ペンの位置を定義するために、オフセット値を使用しました。この場合、X軸は0、Y軸は277です。これらの値は、最初のペンの前にグリッパーを配置します。次に、各ペンのY値を定義する必要がありました。これは、負の方向に21.7mmです。
ここでは、ペンが異なる場合に備えて、各ペンの送り速度と上下位置を個別に調整することもできます。
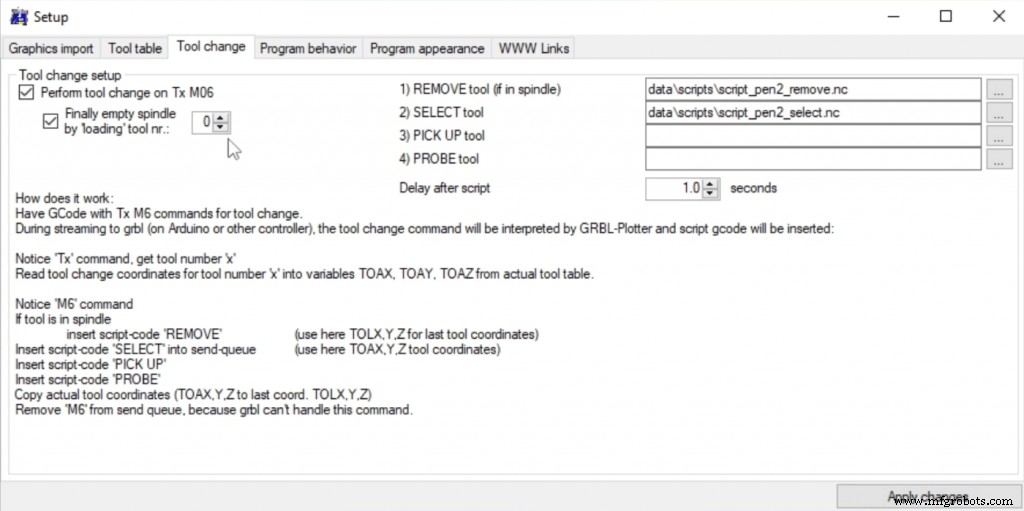
次に、[ツール変更]タップで、[Tx M06でツール変更を実行]を選択する必要があります。これは、このコマンドがGコードに表示されたときにツール変更を実行するようにマシンに指示します。
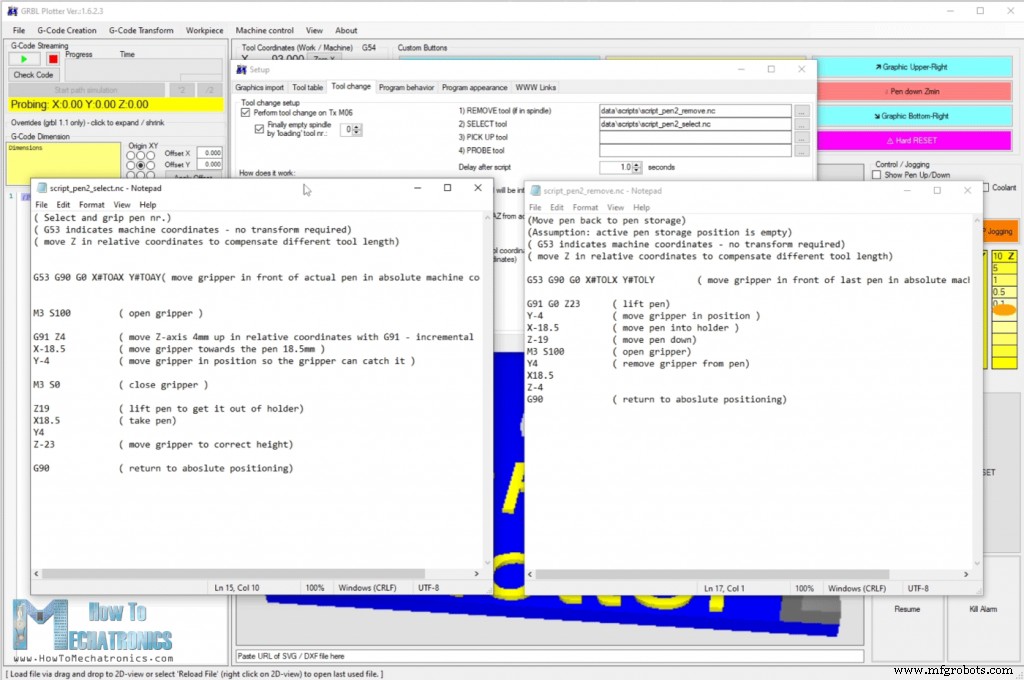
文字Tの後の「x」値は、ツールテーブルのツール番号を示します。ツールの変更を実行するには、TxM06コマンドが表示されたときに実行される「選択」および「削除」スクリプトを含める必要があります。これらのスクリプトでは、ツールを取り出したり取り外したりするためのグリッパーの動きを定義します。
ペンを選択するために、グリッパーは最初に、ツールテーブルで定義されている絶対的なマシン座標で実際のペンの前に配置されます。次に、サーボがグリッパーを開き、さらに4 mm上に移動し、ペンに向かってX方向に移動し、Y方向に少し移動します。次に、グリッパーを閉じ、ペンを持ち上げて同じ位置に戻し、スクリプトを実行します。ペンを取り外す場合、スクリプトの手順は同じですが、順序が逆になります。
もちろん、これらのパラメータはすべて、ペン自体、ペンの寸法、およびホルダーの寸法によって異なります。このプロセスを正しくする唯一の方法は、値をテストして修正することです。
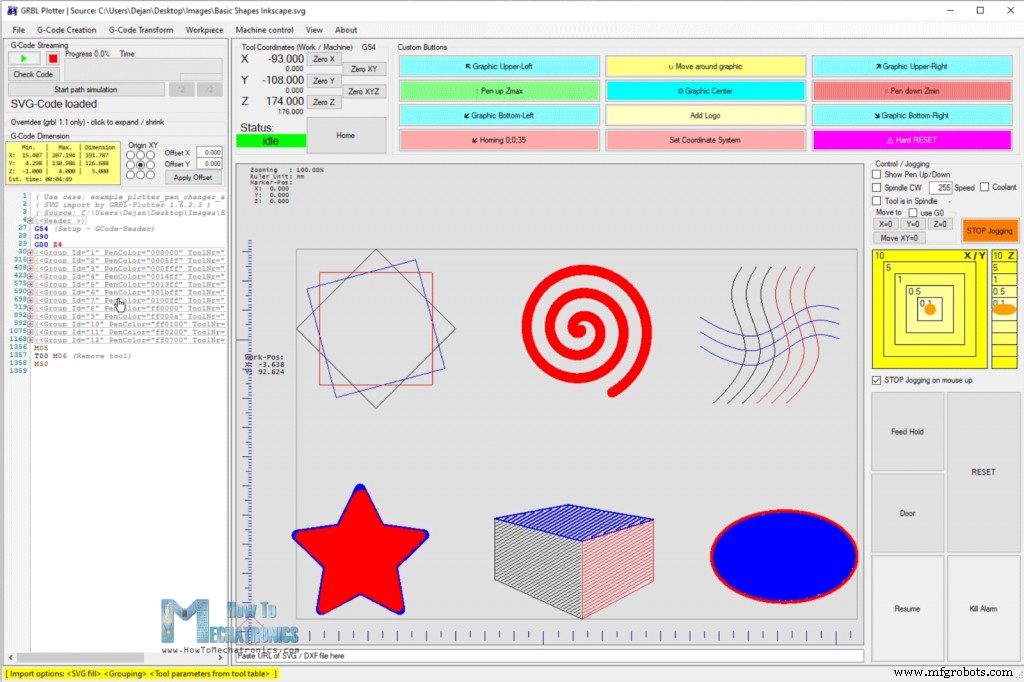
最後に、このGRBL-Plotterソフトウェアを使用して画像からGコードを生成する方法を見てみましょう。
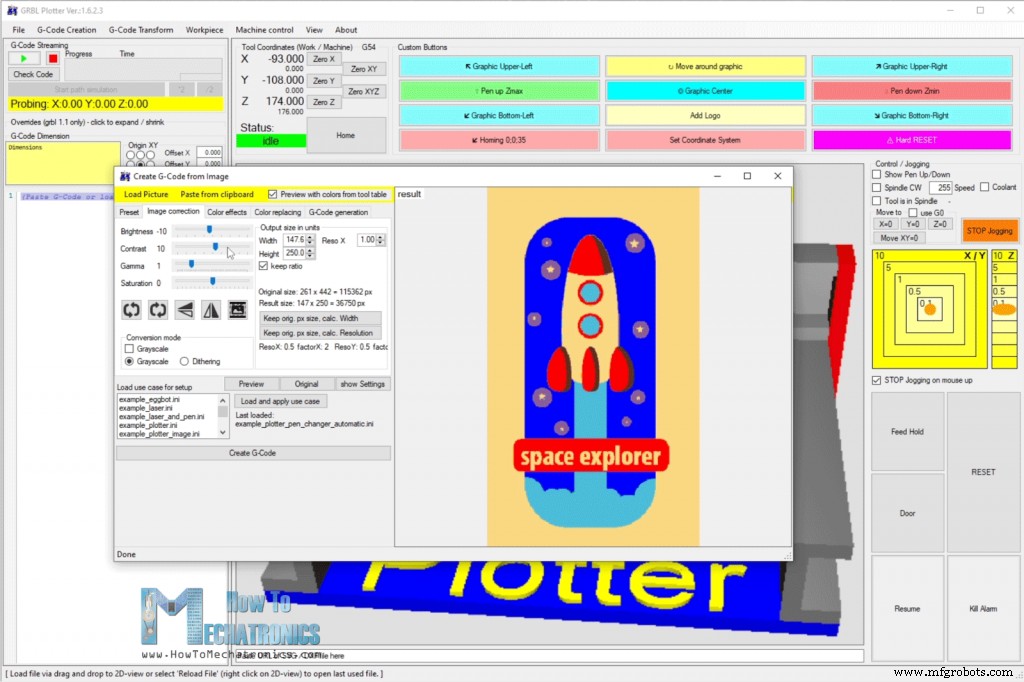
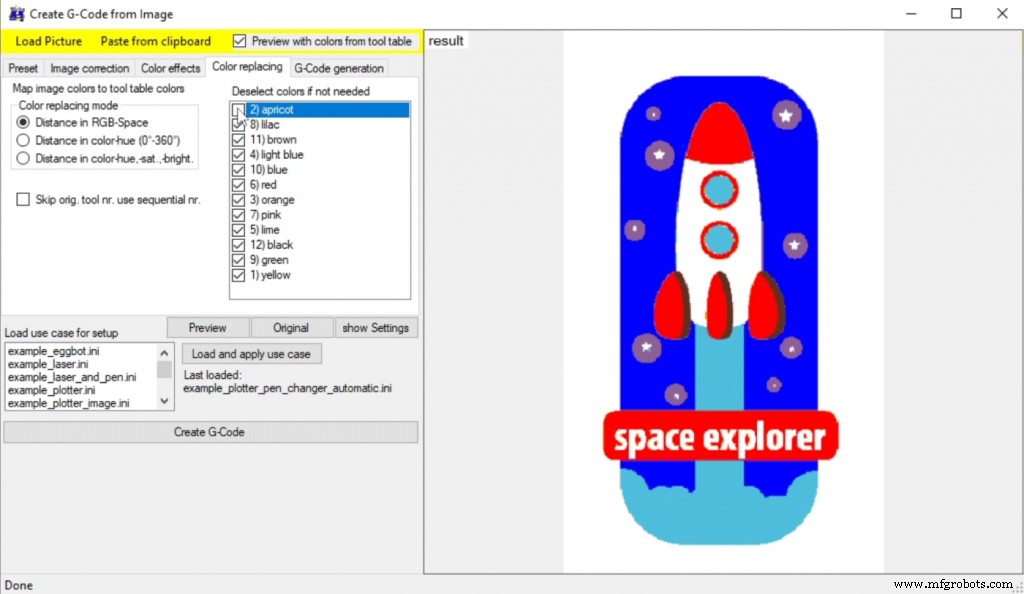
画像を読み込んだら、[テーブルの色でプレビュー]をクリックして、画像がどのように表示されるかを確認できます。次に、[画像補正]タブから、明るさ、コントラスト、ガマ、彩度の値を試して、実際の画像または実際に必要な色に似た色を実現できます。出力サイズをmmで設定でき、色置換タップで、使用したくない色を削除できます。
たとえば、画像の白い色であるアプリコットの色を削除できます。次に、[Gコードの作成]ボタンをクリックすると、Gコードが生成されます。
SVGファイルからGコードを生成することもできます。これは、ドラッグアンドドロップするだけで、ソフトウェアがすぐにGコードを生成します。
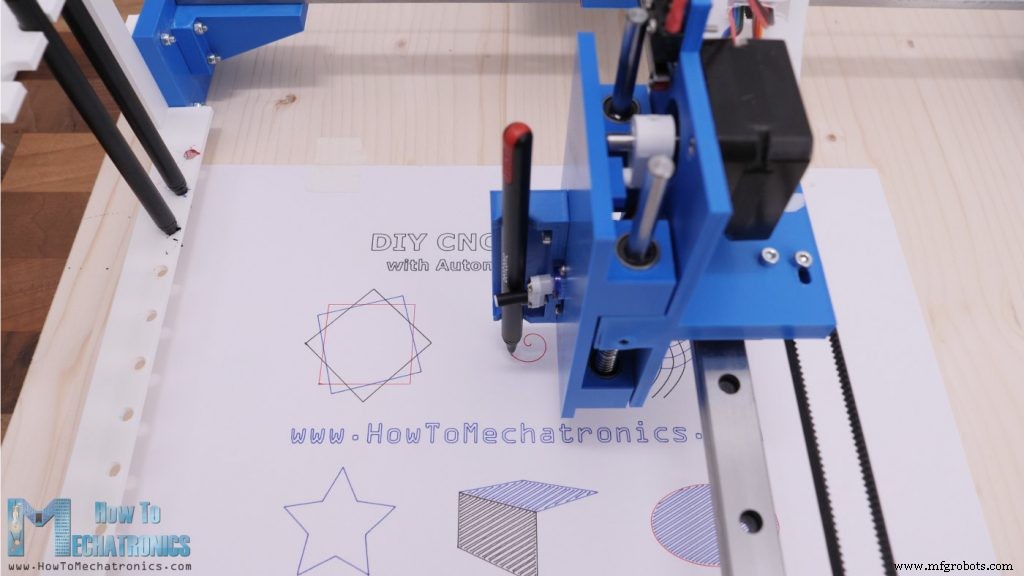
プロットを開始する前に、作業領域の任意の場所に0の位置を設定してから、再生ボタンをクリックする必要があります。
ペンプロッターが動作を開始するので、魔法をかけるのを楽しむことができます。
このビデオを楽しんで、何か新しいことを学んだことを願っています。ご不明な点がございましたら、下のコメントセクションでお気軽にお問い合わせください。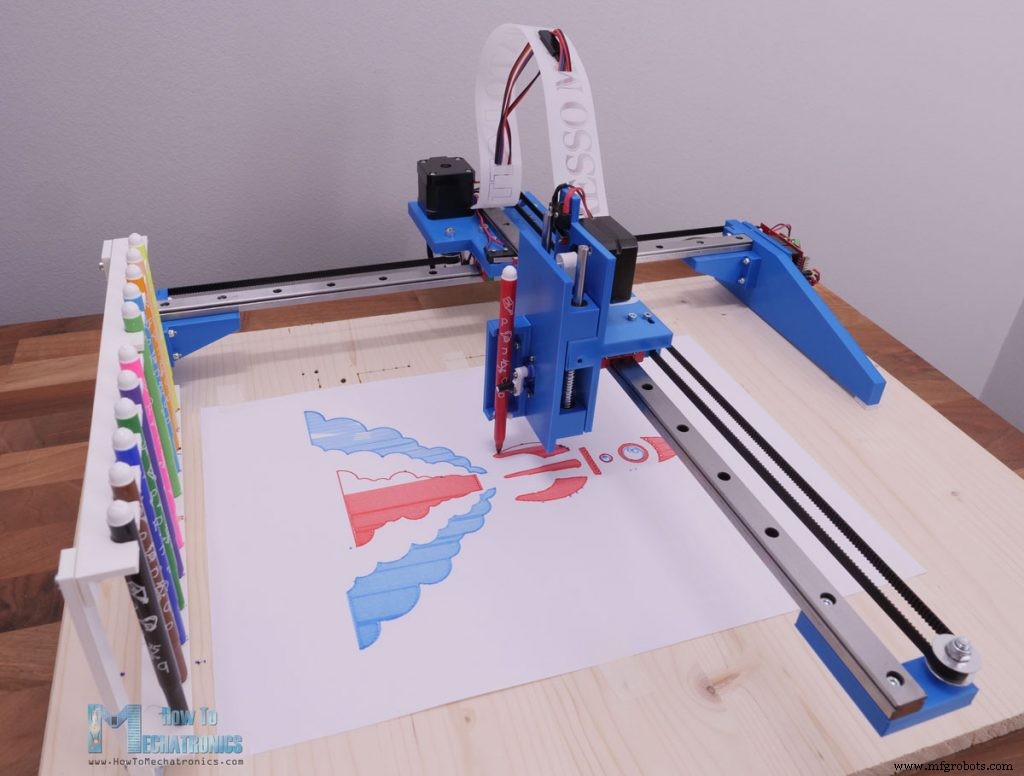

DIYCNCペンプロッター3Dモデル
機械の組み立て





電子機器の接続
DIYCNCペンプロッター回路図
マシンアセンブリの仕上げ


DIYペンプロッタファームウェアおよび制御ソフトウェア
GRBLパラメータ
GRBL-プロッタのセットアップ

自動工具交換によるCNCペンプロッタのGコードの生成
製造プロセス