


自動選別機–メカトロニクス学生プロジェクト
この機械は、スコピエの機械工学部で、5人の学生のチームによって建設とCADの学生プロジェクトとして作成されました。
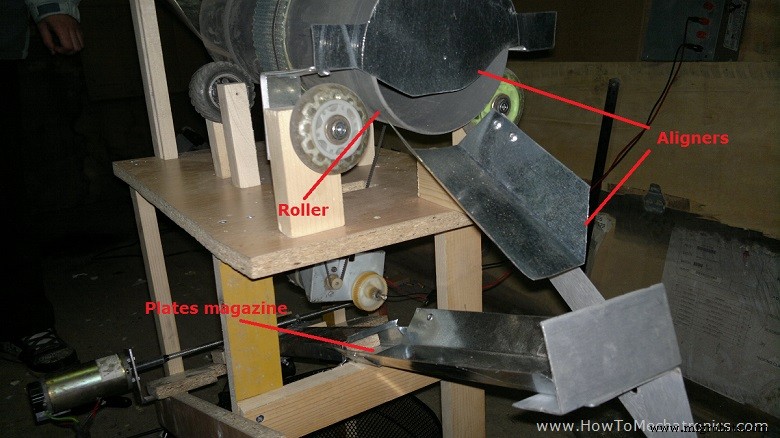
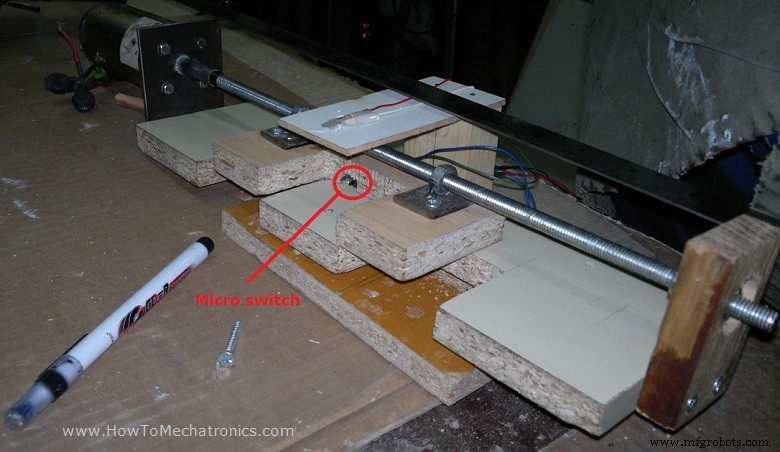
自動仕分け機の仕組みは次のとおりです。
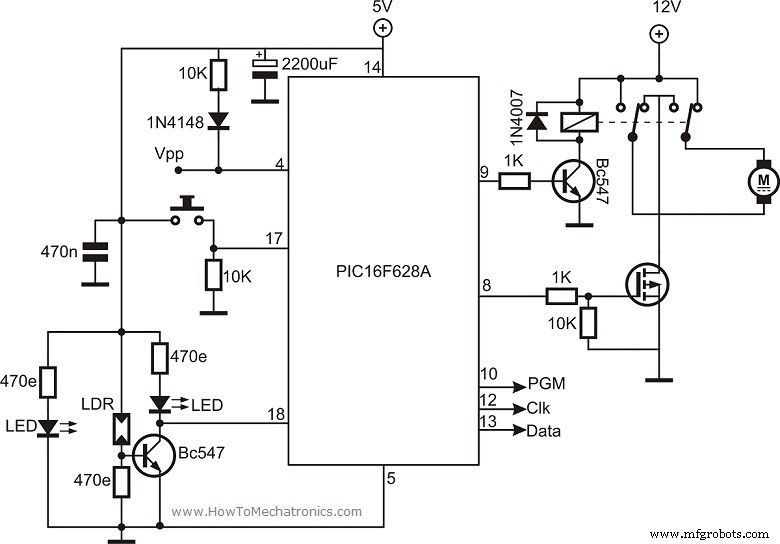
マシンはPIC16F628Aマイクロコントローラーを使用し、MikroElektronikaを使用してプログラムされています。
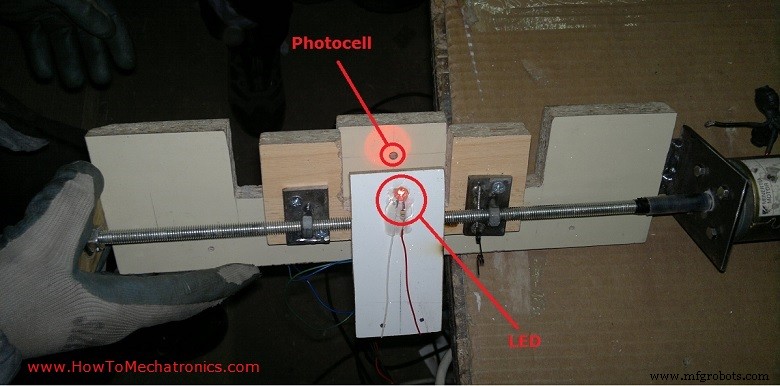
2種類のプレートを選別する機械です。プレートの1つには穴があり、他のプレートにはありません。私たちの仕事は、これらのプレートを自動的に選別する機械を開発することでした。このソリューションは、他の25台のマシンの中で実際に1位を獲得しました。

/********************************************************************************/
/* Mechatronic Design Team */
/* Proekt po Konstruiranje i CAD */
/* "Dizajn i razvoj na nov ured za razdeluvanje na dva tipa plocki" */
/* */
/* */
/* */
/* Mikrokontroler: PIC16F628A */
/* Oscilator: Interen na 4MHz */
/* */
/* Dekemvri, 2012, Skopje */
/********************************************************************************/
void left () {
RB2_bit = 1; //motorot pocnuva da se dvizi na levo
delay_ms (500); // motorot se dvizi do krajna leva polozba
delay_ms (500);
delay_ms (500);
delay_ms (500);
PORTB = 0x00; //koga ke stigne do krajnata leva polozba se gasi
delay_ms (200); //vreme za kocenje na motorot
RB3_bit = 1; //se aktivira relejot za promena na nasokata
delay_ms (20);
RB2_bit = 1; //motorot pocnuva da se dvizi desno
delay_ms (500); //sredna pozicija na motorot
delay_ms (500);
delay_ms (500);
delay_ms (500);
PORTB = 0x00; //motorot se gasi koga ke dojde do sredina
delay_ms (150); //vreme za kocenje na motorot
}
//////////////////////////////////////////////////////////////////////////////
void right () {
RB3_bit = 1; //Se uklucuva relejot za promena na nasoka na motorot
delay_ms (30);
RB2_bit = 1; //motorot pocnuva da se dvizi desno
delay_ms (500);
delay_ms (500);
delay_ms (500);
delay_ms (500); //motorot se dvizi do krajna desna polozba
PORTB = 0x00; //koga ke stigne do krajna desna polozba se gasi
delay_ms (200); //vreme za kocenje na motorot
RB2_bit = 1; //motorot pocnuva da se dvizi levo
delay_ms (500); //sredna pozicija na motorot
delay_ms (500);
delay_ms (500);
delay_ms (500); //sredna pozicija na motorot
PORTB = 0x00; //motorot se gasi koga ke dojde do sredina
delay_ms (150); //vreme za kocenje na motorot
}
//////////////////////////////////////////////////////////////////////////////
void main() { //pocetok na glavna programa
TRISB = 0x00; //PORTB Izlezi
TRISA = 0xff; //PORTA Vlezovi
CMCON = 0x07; //gasenje na komparatori
do {
delay_ms (50);
PORTB = 0x00;
if (PORTA.b0==1) { //dali ima kocka?
delay_ms (100);
if (PORTA.b1==0) { //dali ima otvor?
left (); } //ako ima otvor dvizi se levo
else (right ()); }} //ako nema dvizi se desno
while (1); }Code language: Arduino (arduino)
製造プロセス