


メカトロニクス最終年度プロジェクト
これは私のメカトロニクス最終年度プロジェクトでした スコピエの機械工学部で。目的は、実際の腕の動きと3Dコンピューターモデルとの相互作用を可能にするデバイスを開発することでした。 3つの異なるフィールドを1つのデバイスに統合しました。機械、電気、コンピューター工学:
次のビデオでは、プロジェクトのプレゼンテーションを見ることができます。これがその内容です:
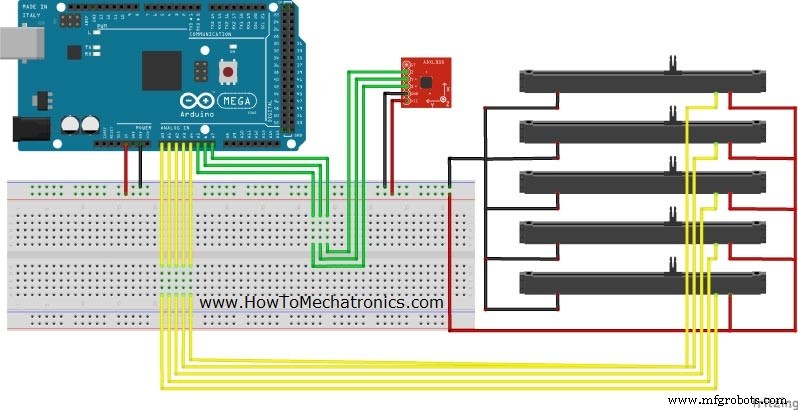
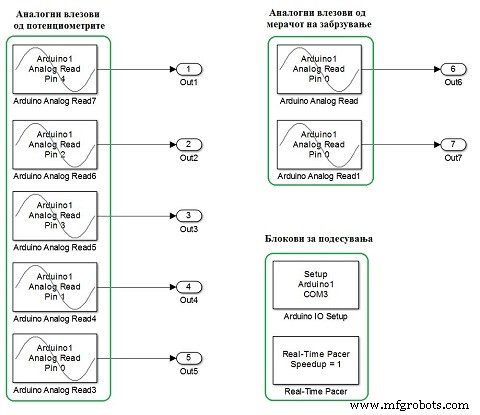
加速度計は、腕の向きを追跡するために使用されます。アームが動くと、加速度計のX、Y、Z軸の値が変化し、Arduinoボードのアナログ入力で読み取られます。彼らによると、3Dモデルも動きます。
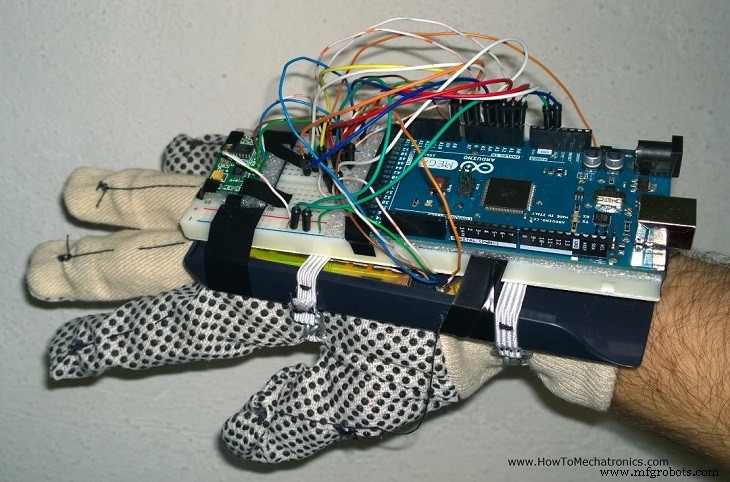
ポテンショメータは、指の位置を追跡するために使用されます。各ポテンショメータにスプリング(ペンスプリング)を取り付けました。スプリングがポテンショメータのスライダーを特定の位置に保持し、指が動くとスライダーが引っ張られ、ポテンショメータの抵抗が変化します。その値はArduinoボードのアナログ入力で読み取られており、それに応じて3Dモデルの指も動きます。
5つのポテンショメータを取り付けるベースとして、電卓のプラスチックカバーを使用しました。その上に、Arduinoボードと加速度計をテープで固定したブレッドボードを置きました。下の写真では、デバイスの最終的な外観を確認できます。
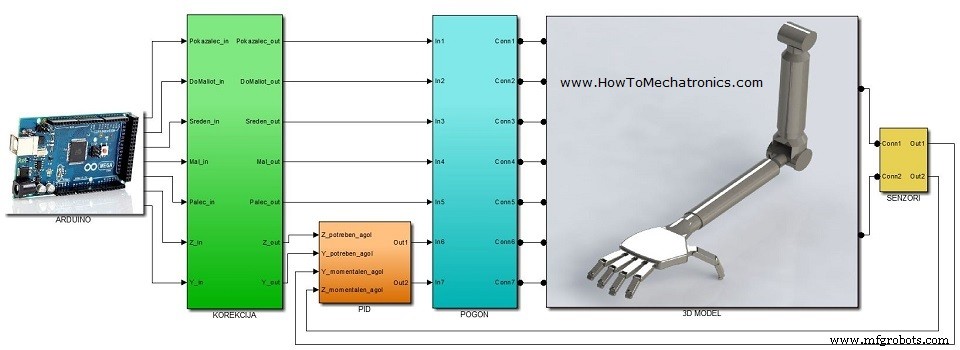
3Dモデルは、人間の腕を表したものです。まず、Solidworksを使用してモデル化し、次にMatworksのSimMechanicsLinkを使用してMatlab/Simulinkに転送しました。
Simulinkモデルを構築する前に、まず、Arduinoボードと通信するためのSimulinkライブラリで構成されるArduinoIOパッケージをインストールする必要がありました。また、Arduino IDEを使用して、Simulinkライブラリを有効にするためにパッケージに付属のArduinoボードにコードをアップロードする必要がありました。ここでは、動作原理を理解してコードを確認できるように、MatlabとArduinoIOパッケージのチュートリアルを強くお勧めします。
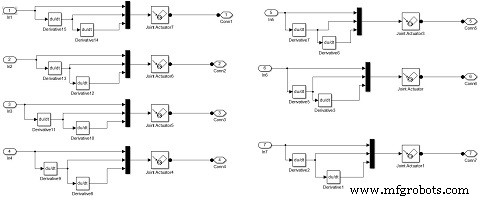
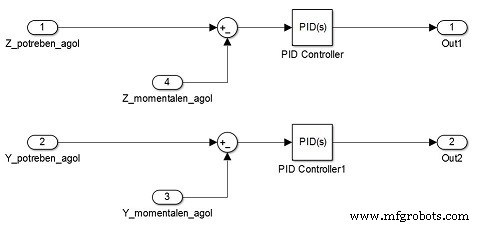
Simulinkモデルを6つのサブシステムに編成しました:
Simulinkモデルはここからダウンロードできます:
このプロジェクトの拡張機能を確認してください。
ゲームコントローラーとして機能するようにArduinoグローブを再プログラムしました。


3Dモデル

MATLAB/Simulinkモデル

製造プロセス