


産業用ロボット:従来型、協調型、適応型
産業用ロボットとは何ですか?
これらはすべて、産業環境でのタスクの自動化を可能にする複雑なメカニズムです。これには、ロボットアームからのものが含まれます 、スタッカー、3軸システム、オートマトン 、など。割り当てられたタスクを実行する前に、外部信号とプログラムされた動きによって制御する必要があるという特徴があります。これらの信号は、PLCによって与えられたタスク開始信号から、次のタスクを実行するためにコンピュータビジョンシステムによって送信された移動座標までのものである可能性があります。
産業用ロボットの種類とその違い
産業用ロボットには、従来型ロボットと協働ロボットの2種類があります。近年、新しいタイプの産業用ロボットが定義され、差別化されています。それらは適応型またはインテリジェントなロボットです。
- 従来のロボットの主な特徴 安全に使用するための物理的な障壁が必要です。
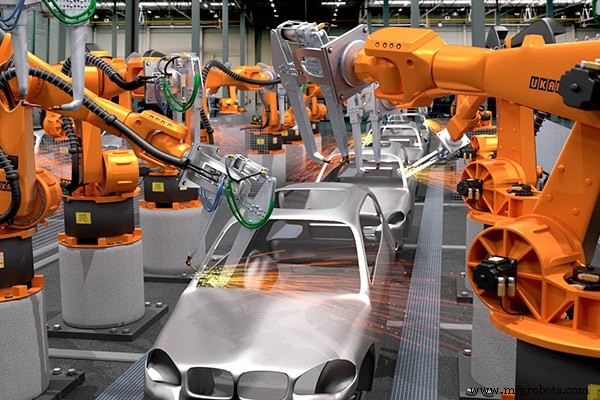

- 協働ロボットの場合 、最も代表的な特徴は、物理的な障壁を必要とせずに、人間のオペレーターと共同で作業できるように準備された設計です。この形式の操作を維持することのマイナスの結果は、従来のロボット工学と比較して、協調型ロボット工学の速度と公称負荷が低いことです。
- 適応型またはインテリジェントなロボット工学 両方のタイプの進化です。それは両方のタイプの長所と短所を持つことができます。従来のロボットと協働ロボットの両方が、適応型またはインテリジェントなロボットに変身する可能性があります。主な特徴は、環境に反応し、その動きを実行している特定のタスクに適応させる能力です。これは、ロボットに「感覚」を提供するセンサーレイヤーと、受信した情報を管理し、適応型またはインテリジェントロボットの動きを制御する深層学習または機械学習システムのおかげで可能になります。
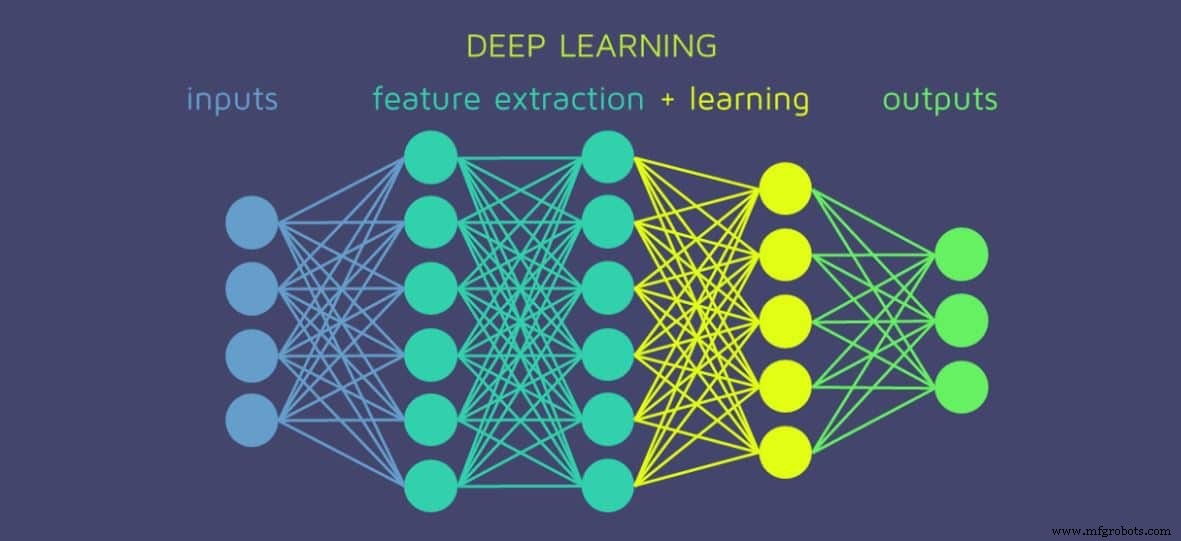
ロボット工学におけるディープラーニングとニューラルネットワーク
センサーシステムによるロボットへのデータの寄与は、それ自体では、環境およびロボットが実行しているタスクに対するインテリジェンスまたは適応性を提供しません。このデータは、適応型またはインテリジェントロボットによって実行される適切なアクションを定義するために処理および処理する必要があります。複雑さに応じて、このデータ処理は従来のソフトウェアまたはディープラーニングを使用して実行できます。 システムとニューラルネットワーク 。ディープラーニングは、センサーデータに基づく意思決定が非常に複雑なシステムで使用されます。
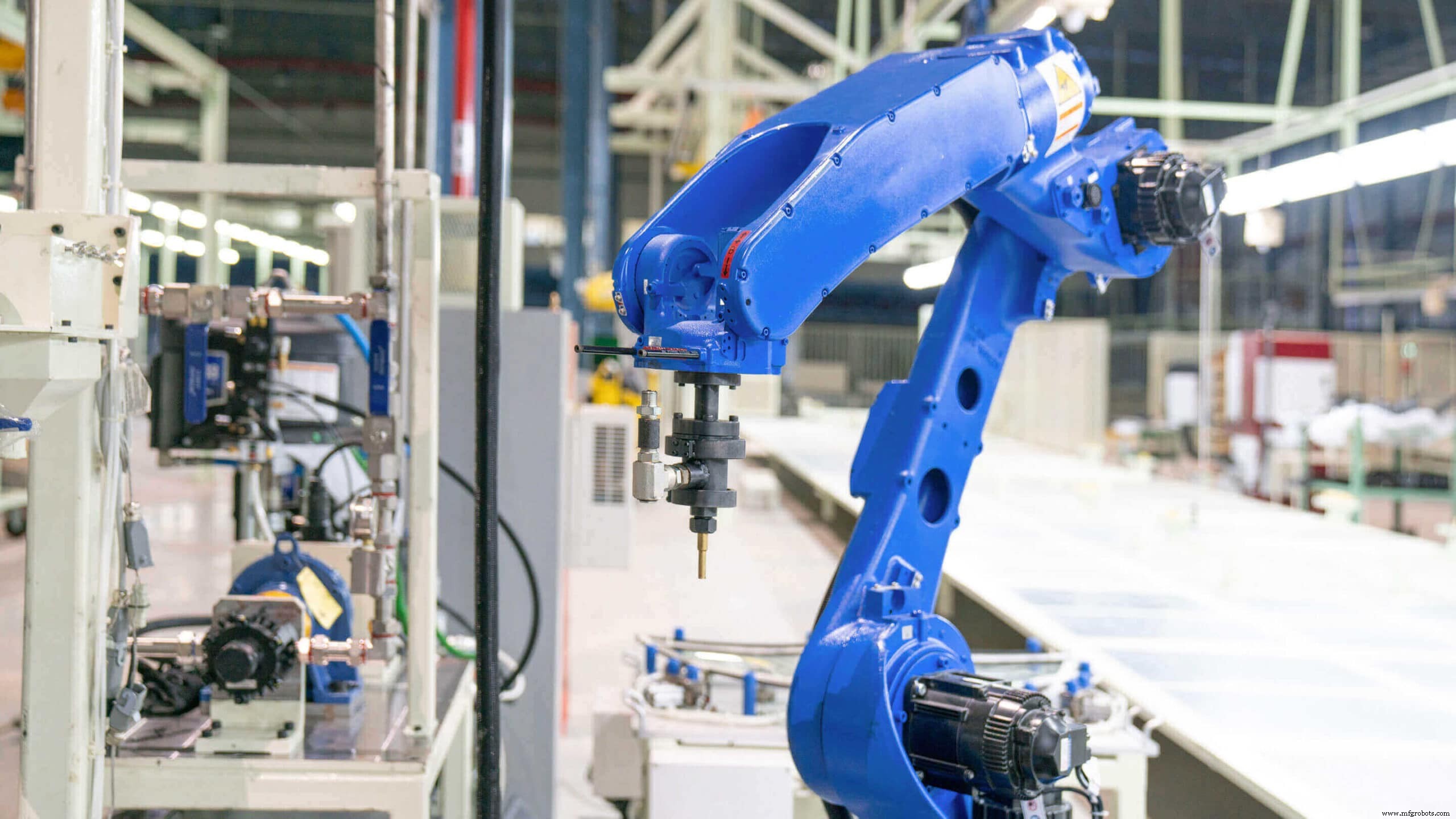
ロボット工学用の爪とツールの設計
産業用ロボットシステムの非常に重要な部分は、製品またはプロセスと相互作用する方法です。爪とツールの設計は、ロボットのプログラミングと通信と同じくらい重要です。これらのシステムは、産業用ロボットが製品に損傷を与えないことを保証する必要があります そして、彼らは工業プロセスで正しくタスクを実行します。処理する製品の形状やプロセスの複雑さのために、この設計が非常に複雑になる場合があります。

アダプティブまたはインテリジェントロボティクスのアプリケーション、利点、および利点
産業用ロボットのアプリケーションはよく知られており、次のようなトピックをカバーしています。
- アセンブリ
- マシンのロードとアンロード。ピックアンドプレース
- 梱包およびパレット化
- 部品の輸送、部品の取り外し
- カット、研削、研磨
- 塗装プロセス
- 接着剤とシーラントの塗布
- 溶接
- 測定と品質管理
ただし、変動性によるより複雑なプロセス 自動化されていません。新しいバリアントのほぼ毎日のプログラムの作成、またはレベルを保証することが不可能なため、従来のまたは協調的なロボット工学による工業化は不可能または収益性がありません。このような場合、適応型またはインテリジェントなロボット工学 ソリューションを提供します。その主な利点は、作業環境への適応です。 。事前設定されたタスクまたはモーション座標を操作する代わりに、フローティングポイントを操作します 。これらのポイントは、いずれの場合も、設備に接続するセンサーによって定義されます。センサーは、コントロールユニットがフローティングポイントを定義するために使用する情報を提供します。この環境への適応は、コントロールユニットの処理能力と、センサーによって提供されるデータの解像度と品質に応じて、多かれ少なかれ大きくなります。
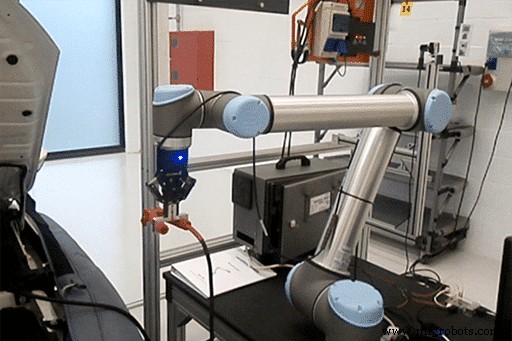
このプロジェクトでは ATRIAが実施するこのシステムでは、ビジョンカメラのおかげで、固定寸法を使用せずに、バッテリーを接続するポイントを処理および選択できます。アダプティブロボティクスのもう1つの利点は、既存の共同または従来のインストールに適用できることです。 投資レベルが低い。 これは、新しいインストールでハードウェアを十分に活用できるためです。最後に、アダプティブまたはインテリジェントロボティクスのもう1つの利点は、その柔軟性です。 。環境やプロセスが変化した場合、システムは経済的な投資なしで適応することができます。適応型またはインテリジェントなロボット工学のインストールが適切に機能するには、ソフトウェアレベルでの変更またはセンサーの更新で十分な場合があります。
この他のプロジェクト また、アダプティブロボティクスシステムのおかげで、ロボットは混沌とした状態で受け取られるため、参加方法とボックスへの配置方法を決定できます
ロボット工学プロジェクトを実施するための手順
産業用ロボットが関与する自動化プロセスで従う必要のある最も一般的な手順は次のとおりです。
- 要件の定義 :このステップでは、産業用ロボットが実行するタスクを、それが満たさなければならない特性とともに定義します。要件を適切に定義することで、次のステップで後の作業と開発の費用を大幅に節約できます。
- ハードウェアとソフトウェアの選択 :前のステップで取得したデータと作業チームの経験に基づいている必要があります。このステップでは、従来のロボット、協働ロボット、または適応型/インテリジェントロボットのどのタイプのロボットシステムが最も適切であるかを定義します。
- インストールの設計 前の2つのステップでクライアントによって定義および検証されたすべてのデータを使用します。設計では、プロセスのさまざまなフェーズと部分、およびさまざまな要素間のワークフローと関係を定義する必要があります。
- 設計段階で検出された最も重要なポイントの検証 。このために、インストールのプロトタイプと部分的な構築を実行できます。このステップは、適応型またはインテリジェントなロボット工学の場合に非常に重要です。また、部品やプロセスのばらつきが非常に大きい施設でも。
- 工業化 設計および検証された施設のこのステップでは、インストールの検証に使用されるテストを定義することが非常に重要です。
プロセスまたは製品のいずれかにロボット工学を適用しますか? お問い合わせください!
関連記事:
- 明日の工場向けの産業用ロボット
- 人工知能ロボット
- 協働ロボットを使用する理由
- さまざまなセクターでのインダストリー4.0アプリケーション
関連プロジェクト:
- バッテリーとコンピュータービジョンの接続
- URとビジョンを使用してテープからピックアンドプレースします
- 協働ロボットを使用したエンドオブライン機能システム
- ビジョンと2アーム協働ロボットによるピッキング
- 高温でのMIR+URを使用した機能のテスト
産業用ロボット