


ポスト プロセッサ エディタとは何ですか? また、どのように使用しますか?
シミュレートされたロボットまたは CNC マシンを使用していますが、正しく動作していません。ポスト プロセッサ エディタを使用するときが来ましたか?
ポスト プロセッサの機能と、編集する理由
オフライン プログラミングを使用している場合は、ポスト プロセッサとやり取りした可能性が非常に高くなります。おそらく、RoboDK を使用して、ロボット機械加工または別のロボット アプリケーション用のロボットをプログラミングしているでしょう。あるいは、CNC マシンをサポートする CAD/CAM システムを使用しているかもしれません。
意識していなくても、ポスト プロセッサを使用して物理マシンをプログラムするシステムを使用していることになります。
ポスト プロセッサは、シミュレートされた環境と物理マシンの間の架け橋です。シミュレートされた命令を、ロボットが使用できるコードに変換します。
ただし、方法を変更したい場合はどうすればよいでしょうか プログラムはこのコードを生成しますか?そこでポスト プロセッサ エディタの出番です…
なぜポスト プロセッサを編集する必要があるのですか?
ほとんどの人は、ポスト プロセッサを編集する必要はありません。
たとえば、RoboDK を使用している場合は、広範なロボット ライブラリからロボット モデルをダウンロードするだけです。各モデルは、RoboDK 内の 80 以上のポスト プロセッサの 1 つに既にリンクされています。シミュレートしたプログラムを実際のロボットに送信するたびに、ポスト プロセッサが「内部で」コードを変換します。
ただし、ポスト プロセッサを編集する必要がある場合もあります。
すべてのロボット メーカーは、独自のロボット コントローラーで動作する独自のプログラミング言語を使用しています。各コントローラーには、さまざまな構成オプションと機能があります。ポスト プロセッサは、これらすべてのカスタム構成オプションを設定できる場所です。

たとえば、Techman ロボット コントローラーには、ユーザーがロボットを再プログラムする前にパスワードを要求するセキュリティ オプションが含まれています。ポスト プロセッサには、このパスワードを有効、無効、および設定するオプションがあります。すべてのロボットにこのオプションがあるわけではありません。
ポスト プロセッサ エディタとは?
ポスト プロセッサ エディタは、ロボットまたは CNC ポスト プロセッサ ファイルを編集するために使用される専用ソフトウェアです。これにより、ポスト プロセッサの編集が、多くのプログラミング システムで唯一のオプションである標準のテキスト エディタよりも直感的になります。
そのようなソフトウェアの例は、RoboDK に含まれているポスト プロセッサ エディタです。
RoboDK ポスト プロセッサは、Python プログラミング言語で記述されています。サポートされているポスト プロセッサごとに、コンパイル済みライブラリ (PYC ファイル) と、すべての構成プロパティを保持する編集可能な Python スクリプトがあります。
構成を完全に制御したい場合は、これらの構成ファイルを標準のテキスト エディタで編集できます。ただし、RoboDK は、より直感的なポスト プロセッサ エディターも提供します。これにより、コードにまったく関与することなく、選択したロボットのパラメーターを変更できます。
ポスト プロセッサを簡単に編集する方法
RoboDK でポスト プロセッサを編集する最も簡単な方法は、ポスト プロセッサ エディタを使用することです。各パラメーターと推奨値を使用する可能性が最も高い時期に関する情報を提供します。このツールを使用すると、ロボットのユース ケースの大部分をカバーできます。
各ポスト プロセッサには、構成プロパティのリストが含まれています。これらは、ロボットの製造元によって異なります。
一部のポスト プロセッサには、プロパティがほとんど含まれていません。たとえば、Mecademic ロボットのポスト プロセッサには、1 つのプロパティ (プログラム ファイルのファイル タイプ) のみが含まれます。
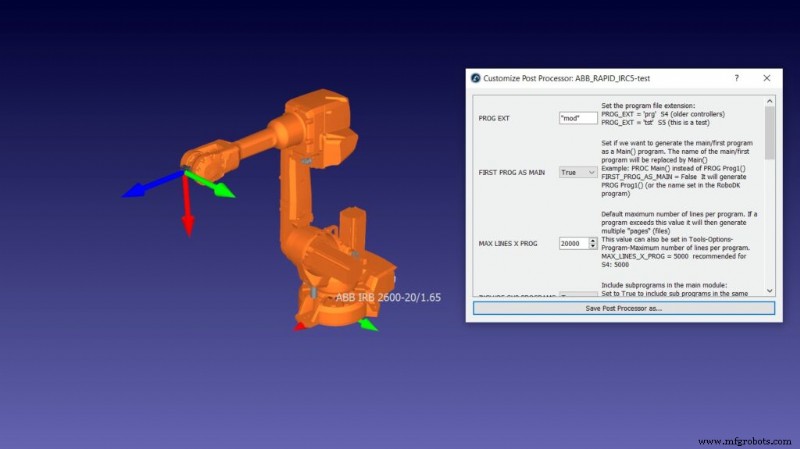
他のポスト プロセッサには、多くのプロパティが含まれています。たとえば、ABB ロボット用の ABB_RAPID_IRC5 ポスト プロセッサには、ロボットのデフォルト速度から外部ターンテーブルの構成フラグまで、16 個のプロパティがあります。
どのようなロボットを使用していても、そのポスト プロセッサを編集する最も簡単な方法は、RoboDK エディタにロードすることです。利用可能なすべての構成プロパティを確認して、アプリケーションに最適なものを決定できます。
シンプルなポスト プロセッサ編集ガイド
ポスト プロセッサ エディタを開くと、利用可能なプロパティのリストが表示されます。
どのプロパティを調整し、どの値を設定するかをどのように決定しますか?
プロセスを示すために具体的な例を使用してみましょう.会社の協働ロボットシリーズのAUBOポストプロセッサを見ていきます.
AUBO ポスト プロセッサには次のプロパティが含まれています:
- PROG EXT — これはプログラム拡張であり、多くのポスト プロセッサに含まれています。 RoboDK が生成するファイルの種類を指定します。
- SPEED MS および SPEED RAD — 円運動の速度をメートル/秒およびラジアンで指定します。
- ACCEL MSS および ACCEL RADSS — これは、ロボットの加速度をメートル/秒の平方で指定するか、円加速度の場合はラジアン/秒の平方で指定します。
ご覧のとおり、多くの場合、プロパティは命名規則から明らかです。ただし、プロパティの目的がすぐにはわからない場合は、通常、エディターにその説明があり、多くの場合、推奨される値も表示されます。
それでも特定のプロパティの目的がわからない場合は、ロボットのマニュアルで情報を見つけるか、RoboDK フォーラムで質問することができます。
新しい RoboDK ポスト プロセッサ エディターの場所
RoboDK エディタでロボットのポスト プロセッサの編集を開始しました!
エディターを有効にして使用する方法については、ドキュメント ページを参照してください。
質問がありますか? 以下のコメント欄でお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、または RoboDK フォーラムでのディスカッションに参加してください。また、豊富なビデオ コレクションをチェックして、RoboDK YouTube チャンネルに登録してください
産業用ロボット
- 予防保守ソフトウェアのデコード:その機能と使用方法
- リモートコミッショニング:なぜそれが必要なのか、そしてそれをどのように使用するのか
- 総合的な効果的な機器のパフォーマンス:TEEPとは何ですか、またそれを使用してスケジューリングを改善する方法
- P-F曲線:それは何であり、メンテナンスでどのように使用するか
- IoTプラットフォームとは何ですか? (そして1つを選択する方法)
- 圧力損失とは何ですか?どのようにそれを防ぎますか?
- コンパクターとは何ですか?適切なコンパクターを選択するにはどうすればよいですか?
- インダストリアルクラッチ:それらは何であり、どのように使用しますか?
- PIC18マイクロコントローラー:その概要と使用方法
- Ironworker Machineとは何ですか、なぜ必要なのですか?
- 参照指定子とは何ですか?アセンブリでどのように使用しますか?