


モータードライバーとは何ですか。また、適切なドライバーをどのように選択しますか?
モータードライバーとは? Arduinoでモーターを制御する場合は、モータードライバーを使用する必要があります。しかし、モータードライバーとは何ですか、そしてどのように適切なドライバーを選択しますか?
この記事では、これらの質問などに回答します。利用可能なモータードライバーのタイプ、各タイプで実行できること、およびプロジェクトに適したモータードライバーを選択する方法について説明します。だから、モータードライバーについて知る必要があるすべてを学ぶために読んでください!
モータードライバーとは何ですか?

遊星歯車Bldcモーター
モータードライバーは、電気モーターの速度と方向を制御する電子デバイスです。モータードライバーを使用して、おもちゃ、リモートコントロールカー、ロボットなどの小さなモーターを制御できます。また、これを使用して、産業用アプリケーションでより大きなモーターを制御することもできます。
モータードライバーは必要ですか?
モータードライバーを使用する主な理由は、モーターの駆動に必要な大電流からマイクロコントローラーを保護するためです。モーターをマイクロコントローラーに直接接続しようとすると、マイクロコントローラーを流れる電流によってモーターが損傷する可能性があります。
モータードライバーを使用するもう1つの理由は、マイクロコントローラーよりも多くの電力を供給できることです。したがって、これは、重い負荷を移動したり、大量の電力を必要とするモーターを駆動したりする必要があるアプリケーションに役立ちます。
モータードライバーはどのように機能しますか?
モータードライバーICはパワーアンプです。さらに、マイクロコントローラーから低電力信号を受け取り、それを増幅して、モーターを駆動するのに十分な電力を供給します。
さらに、ほとんどのモータードライバーには、過電流や過熱などに対する保護機能も組み込まれています。これにより、マイクロコントローラーとモータードライバー自体の両方が保護されます。
モーターを停止する方法(ブレーキ)
モーターを停止したい場合、2つのオプションがあります:
–惰行:
これは、モーターから電源を切るときです。欠点は、モーターがしばらく回転し続け、モーター自体またはモーターが取り付けられているものに損傷を与える可能性があることです。
–ブレーキ:
これは、反対方向にモーターに電力を供給する場合です。これにより、モーターはほぼ即座に停止します。
ただし、これの欠点は、モーターに大きなストレスをかけ、モーターを損傷する可能性があることです。
どちらを選択するかは、アプリケーションによって異なります。モーターをすばやく停止する必要がある場合は、ブレーキを使用する必要があります。電源を切った後、しばらくモーターが回転してもかまわない場合は、惰性走行を使用できます。
それを考える一つの方法はこれです:あなたが丘を下って行く自転車に乗っていたなら、あなたは惰性で走りたいでしょう。しかし、坂を上る自転車に乗っている場合は、ブレーキをかけたいと思うでしょう。
考慮すべきもう1つのことは、使用しているモーターの種類です。ブラシ付きDCモーターを使用している場合は、これらのモーターが必要とする大電流を処理できるモータードライバーが必要になります。ステッピングモーターを使用している場合は、マイクロステッピングが可能なモータードライバーが必要になります。
モータードライバーの種類
モータードライバーには、ブラシ付きとブラシレスの2つの主要なタイプがあります。
ブラシ付きモータードライバーは、通常、RC玩具などの低電力アプリケーションに適用できます。さらに、特別なセンサーやコントローラーを必要としないため、使いやすくなっています。
ブラシレスモータードライバーは、ドローンや電気自動車などの高出力アプリケーションで一般的です。さらに、特別なセンサーとコントローラーが必要なため、使用がより複雑になります。
ブラシ付きとブラシレスの他に、次のタイプもあります:
DCモータードライバー
DCモーター
出典:ウィキメディアコモンズ
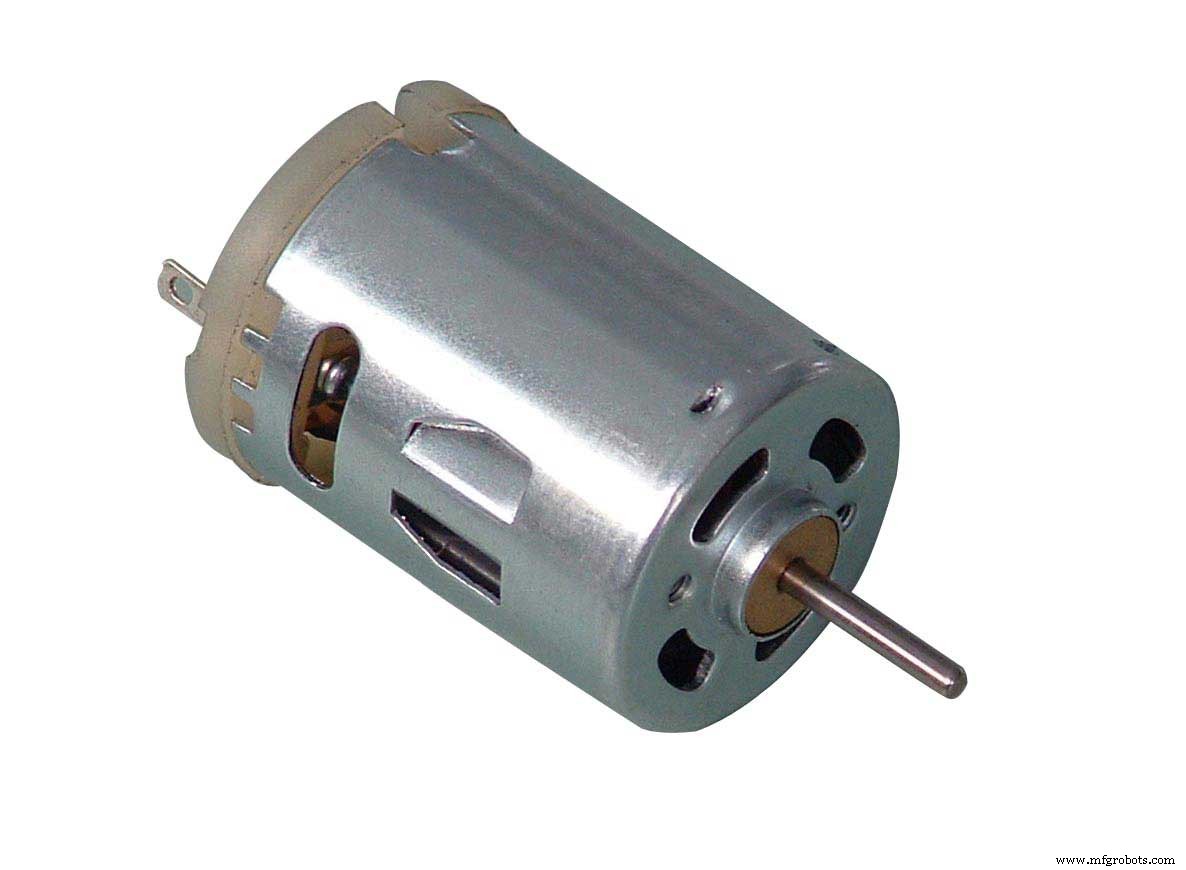
DCモーターは、最も一般的なタイプのモーターです。それらはファンからハードドライブまですべてに共通しています。さらに、DCモーターを使用して速度と方向を制御できます。
サーボモータードライバー

ServoDrive
出典:ウィキメディアコモンズ
サーボモーターは、ロボットやCNCマシンなど、正確な制御が必要なアプリケーションに適用できます。
さらに、サーボモーターを使用して、その位置、速度、およびトルクを制御できます。
ステッピングモータードライバー
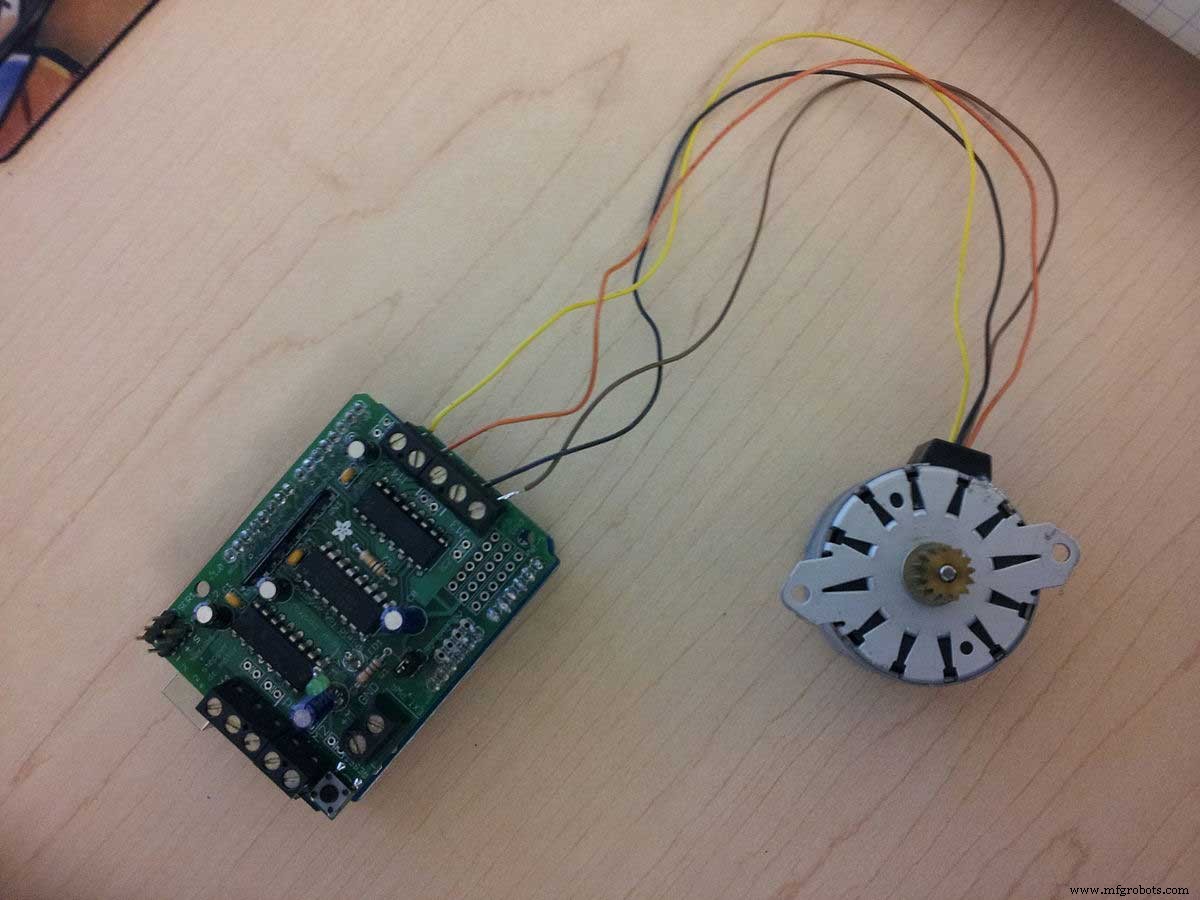
ステッピングモーター
出典:ウィキメディアコモンズ
ステッピングモータードライバーは、電気エネルギーを機械エネルギーに変換するタイプの電気モーターです。そして、それらを使用して速度と方向を制御できます。
さらに、プリンターやスキャナーなど、正確な位置決めが必要なアプリケーションにも適用できます。また、それらを使用して、ステップレートと方向を制御することもできます。
その他のタイプ:
上記のタイプの他に、
などの他のタイプの電気モーターもあります。デジタルステッピングドライバー
デジタルステッピングドライバーは、デジタル信号を使用してステッピングモーターを制御するモータードライバーです。
クローズドループステッピングドライバー
クローズドループステッピングドライバーは、フィードバックを使用してステッピングモーターを制御するモータードライバーの一種です。
アナログステッピングドライバー
アナログステッピングドライバーは、アナログ信号を使用して制御するモータードライバーの一種です。
統合ステッパードライバー
統合モータードライバーは、モータードライバーとマイクロコントローラーの機能を組み合わせたモータードライバーの一種です。そして、このタイプのモータードライバーは、多くの場合、ロボット工学アプリケーションに適用できます。
BLDCモータードライバー
BLDCモーターはブラシレスDCモーターです。また、コンピュータのハードドライブや電気自動車など、高トルクと低ノイズを必要とするアプリケーションで一般的です。
BLDCモータードライバーは、速度と方向の制御に慣れています。
DCモータードライバー回路
このセクションでは、いくつかのDCモータードライバー回路について学習します。
トランジスタを使用したDCモータードライバ回路
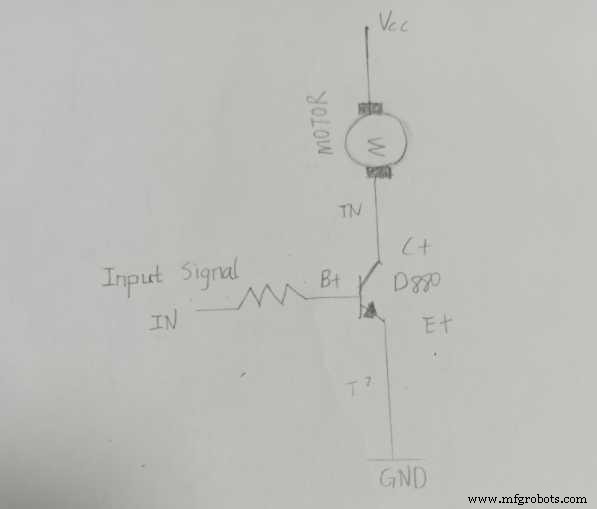
DCモータードライバー回路
これは基本的なDCモータードライバー回路です。さらに、DCモーター、抵抗、パワートランジスタ(D880)を使用して動作します。
Hブリッジ回路
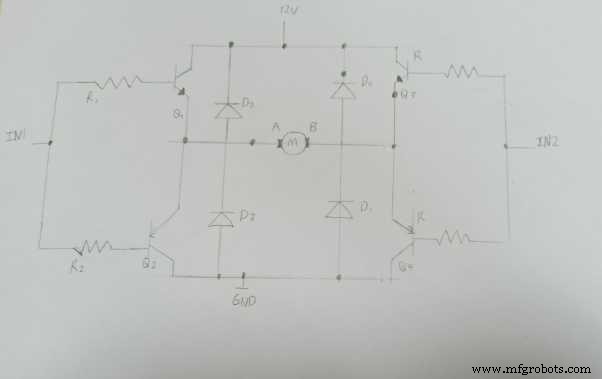
Hブリッジ回路
Hブリッジ回路は、DCモーターの速度と方向を制御するためのものです。さらに、この回路は、DCモーターを両方向に駆動する必要があるアプリケーションで使用できます。
さらに、ロボットアプリケーションで使用できます。ロボットの方向を変えるなど。
モータードライバーIC
モータードライバーICは、モーターの制御に使用できる専用ICです。また、モータードライバーICは、DCモーター、サーボモーター、ステッピングモーターの制御に役立ちます。
最も頻繁に使用されるモータードライバーICは次のとおりです。
– L293D
L293DはHブリッジドライバICの一種です。また、リレー、ソレノイド、DC、バイポーラステッピングモーターなどの誘導性負荷を駆動するために使用できます。
– L298N
L298NもHブリッジドライバICの一種です。また、DCモーター、ステッピングモーター、アクチュエーターの駆動にも使用されます。
– A4988
– DRV8825
DRV8825は、簡単な操作のためのトランスレータを内蔵したマイクロステッピングドライバICです。さらに、DRV8825を使用してバイポーラステッピングモーターを駆動することもできます。
モータードライバー機能
モータードライバーICの機能は次のとおりです。
–モーターへの電力供給
–モーターの速度と方向の制御
–モーターのブレーキ
–過電流による損傷からモーターを保護する
–電流制限機能の提供
モータードライバーのアプリケーション
モータードライバーとは何か、そしてそれらが何をするかがわかったので、最も一般的なアプリケーションのいくつかを見てみましょう。
最も一般的なアプリケーションの1つは、遠隔操作のおもちゃです。モータードライバーは、マイクロコントローラーからの信号を増幅して、おもちゃのモーターを制御できるようにします。
もう1つの一般的なアプリケーションは、ハードディスクドライブです。ここでのモータードライバーは、ディスクを回転させるスピンドルモーターを制御します。

さまざまなタイプのコンピュータドライブ
プリンタでは、モータードライバーがフィードモーターとプリントヘッドキャリッジモーターの両方を制御します。
そして最後に、自動組立機では、モータードライバーが、コンベヤーベルトモーターやグリッパーアームモーターなど、さまざまなモーターを再び制御します。
モータードライバーICの利点
利点は次のとおりです。
–まず、マイクロコントローラーよりも多くの電力を供給できます。
–次に、過電流や過熱などに対する保護機能が組み込まれています。
–最後に、アンプとモータードライバーの両方を1つのICに統合するため、スペースを節約できます。
モータードライバーICの欠点:
–まず、高額になる可能性があります。
–また、電圧と電流の定格にも注意を払う必要があります。
–さらに、一部のICは使いにくい場合があります。
モータードライバーが何であるかがわかったので、プロジェクトに適したドライバーを選択する必要があります。さまざまな種類のモータードライバーが存在するため、これには注意が必要です。
適切なタイプのモータードライバーを選択する方法
モータードライバーを選択する際に考慮すべき重要な要素は次のとおりです。
–使用しているモーターのタイプ(ブラシ付きまたはブラシレス)
まず、使用しているブラシ付きモーターかブラシレスモーターかを確認する必要があります。
どのタイプのモーターが使用されているかわからない場合は、データシートをご覧ください。
–モーターの電圧
モータードライバーを選択するときは、電圧定格、論理レベル、および機能を考慮することが重要です。
モーターの電圧に対応し、マイクロコントローラーのロジックレベルを処理でき、必要な機能を備えたモータードライバーを選択してください。
電圧に関しては、ほとんどのモータードライバーはさまざまな電圧を処理できます。たとえば、L293Dは+ 36V〜-36Vの電圧を処理できます。ただし、使用している電圧がモータードライバーの指定された制限内にあることを確認することが重要です。最大電圧を超えると、モータードライバーが損傷する可能性があります。
モータードライバーの定格電圧は重要です。ほとんどのモータードライバーは、約0.65V〜36Vの電圧で動作できます。
モータードライバーの特徴と能力も重要です。したがって、アプリケーションに必要な機能を備えたモータードライバーを選択してください。
–モーターの現在の定格
モーターが引き込む電流の量を処理できるモータードライバーを選択することが不可欠です。十分に強力ではないドライバーを選択すると、過熱してモーターが損傷する可能性があります。強力すぎるドライバーを選択すると、決して使用しない余分な機能にお金を浪費することになります。
これは、モータードライバーがモーターに提供できる電流の量です。大電流を必要とする大型モーターを使用している場合は、定格電流の大きいモータードライバーを使用する必要があります。たとえば、L293Dはチャネルあたり最大600mAを供給できます。
-インターフェース
モータードライバーを選択するときは、制御インターフェースも考慮する必要があります。比較すると、最も一般的なインターフェイスはHブリッジです。このタイプのインターフェースを使用すると、モーターの方向と速度を制御できます。
その他のインターフェースには、L293D、L298N、およびTB6612FNGが含まれます。これらのインターフェースは、さまざまな機能を提供します。
マイクロコントローラーでモータードライバーを使用している場合は、インターフェイスのロジックレベルも考慮する必要があります。ほとんどのマイクロコントローラーはTTLロジックを使用していますが、これは多くのモータードライバーと互換性がありません。
モータードライバーでTTLマイクロコントローラーを使用する場合は、ロジックレベルコンバーターを使用する必要があります。
–必要なトルクの量
トルクも考慮する必要がありますが、ストールトルクを確認する必要があります。これは、モーターが動かないようにするために必要なトルクです。
保持トルクは、負荷の抵抗を克服するために必要なものです。重い荷物を動かす必要がある場合は、保持トルクの高いモーターが必要になります。
–モーターを回転させるのに必要な速度
また、モーターの回転速度も考慮する必要があります。モーターを必要な速度で回転させるのに必要な量の電力を供給できるモータードライバーを選択する必要があります。
–モーターのサイズと重量
モータードライバーがモーターの重量とサイズをサポートできることを確認する必要があるため、これも重要な考慮事項です。
–モーターが使用される環境(屋内または屋外)
さまざまなモータードライバーがさまざまな環境向けに設計されているため、これを考慮することが重要です。屋外でモーターを使用する場合は、耐候性のあるモータードライバーが必要になります。
–あなたが喜んで使う金額
モータードライバーを選ぶときは、価格も考慮することを忘れないでください。手頃な価格で予算内のモータードライバーを選択してください。
モータードライバーを選択するときは、インターフェイスのタイプ、電圧定格、およびロジックレベルを考慮する必要があります。さらに、モータードライバーの特徴と能力も考慮する必要があります。とにかく、アプリケーションに最適なモータードライバーを選択してください。
Hブリッジとは何ですか?
Hブリッジは、スイッチとして2対のトランジスタを含むタイプのスイッチ回路です。 DCモーターの逆方向と順方向の操作は、スイッチによって制御されます。コントローラーの大部分はこの形式で設計されています。
同様に、両方のトランジスタをオンにすると、モーターは一方向に回転します。両方のトランジスタがオフの場合、モーターは動作しません。トランジスタペアは同時にオンにすることも、一方のペアをオンにしてもう一方のペアをオフにすることも、両方をオフにすることもできます。
これにより、モーターが反対方向に回転します。各トランジスタがオンになっている時間を調整することで、モーターの速度が増減します。
概要
モータードライバーは、ステッパーまたはDCモーターを制御できるICです。対照的に、モータードライバーにはさまざまな種類があり、それぞれに長所と短所があります。一般的なモータードライバーICには、L298N、DRV8825、TB6612FNGなどがあります。
モータードライバーを選択するときは、モーターの電圧と電流の要件、およびチップの最大許容消費電力を考慮する必要があります。さらに、ドライバーがモーターに必要なスイッチング周波数を処理できることも確認する必要があります。
ほとんどの標準MCUは高出力モーターを直接駆動できないため、高出力DCまたはステッピングモーターを制御する場合はモータードライバーを使用する必要があります。
産業技術
- 適切なレベリングフィートを選択する方法
- 適切な引き出しスライドを選択する方法
- 3種類のフィットと適切なものの選び方
- さまざまな種類のクレーンとは何ですか?どれがあなたに適していますか?
- コンパクターとは何ですか?適切なコンパクターを選択するにはどうすればよいですか?
- クレーンの購入:適切なクレーンの選び方
- 倉庫管理システムとは何ですか?倉庫管理システムの利点と、ビジネスに適したWMSを選択する方法をご覧ください
- CMMSソフトウェアとは何ですか? CMMSソフトウェア、その利点、および最適なCMMSソフトウェアプログラムを選択する方法の概要
- CNC に適したカッターとプログラミングの選択方法
- CNC マシン ショップはどのように機能し、適切なマシンをどのように選択しますか?
- 適切なギアヘッドの選び方