2026 溶接ポジショナ ガイド:1 軸、2 軸、および 3 軸システムの選択

EVST 編集チームによる · 最終更新日:2026 年 6 月 11 日
溶接ポジショナーは、ワークピースを回転、傾斜、または持ち上げる動力付きの機械で、各溶接シームに平坦または水平方向、つまり最高の溶接品質と溶着速度が得られる位置でアクセスできるようにします。ポジショナは動力軸の数によって分類されます。1 軸ユニットは 1 つの軸を中心に回転し、2 軸ユニットは傾斜機能を追加し、3 軸ユニットは 2 番目の回転または垂直リフトを導入します。適切な構成の選択は、部品の形状、重量、溶接を人間のオペレーターが行うかロボットが行うかによって決まります。
溶接ポジショナーが重要な理由
溶接の品質は本質的に溶接の位置に関係しています。構造用鋼の溶接規定である AWS D1.1 では、重力によって溶融池が安定するため、平坦 (1G/1F) および水平位置により、より高い電流、より速い移動、および優れた融合が可能になると規定されています。ポジショナは、溶接が進行するにつれて継ぎ目をこれらの好ましい方向に保つため、溶接機やロボットが固定部品の周りの継ぎ目を追いかける必要がなくなります。
その利点は 3 つあります。最適なパラメータによる高い成膜率、位置ずれ溶接 (多孔性と融着不足の主な原因) を回避することによる欠陥率の低下、および部品が手動でクランプを外して回転し、再固定する代わりに次の継ぎ目に自動的に割り出しされるため、サイクル タイムの短縮です。ロボットセルでは、ポジショナーを使用して、単一のアームで複雑な形状を 1 つの連続プログラムで溶接できます。ロボット溶接のより広い視野については、重工業向け溶接ロボット ガイドをご覧ください。
軸数ごとの 3 つのポジショナ クラス
すべての溶接ポジショナは、その動力軸に基づいて 3 つのファミリーのいずれかに適合します。軸数によって、どの継ぎ目を平らに表示できるかが決まり、セル サイズの最初の仕様が設定されます。
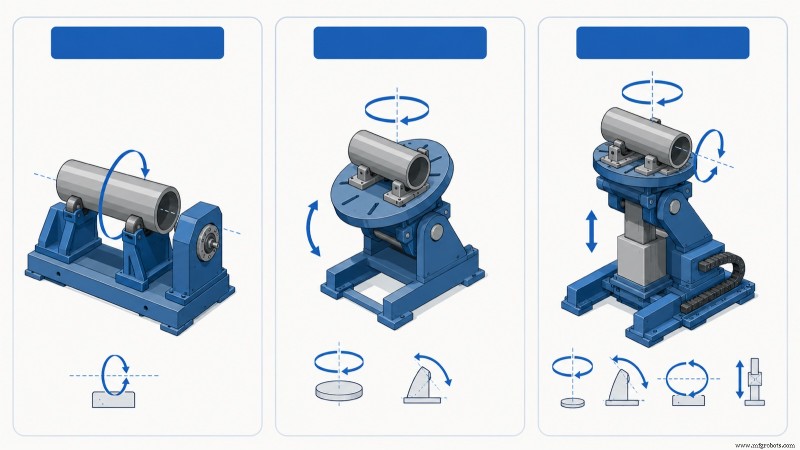
単軸ポジショナ
単軸ユニットは、単一動力による動き、通常は水平軸またはほぼ水平軸を中心とした回転を提供します。これらは、パイプ、圧力容器のシェル、フランジ、シャフトなどの円筒形の回転対称部品の主力製品です。部品は固定トーチの下で回転しますが、シームは平らな位置に留まり、円周溶接に最適です。 EVST の単軸ラインナップである単軸メインボックス サーボ ポジショナ、単軸水平サーボ ポジショナ、ヘッド &テールストック単軸溶接ポジショナは、駆動主軸台と自由回転心押し台の間に長い部品をクランプして、独自の中心線で回転できるようにします。
2 軸ポジショナ
回転に傾斜を加えると、2 軸ユニットが回転して傾き、箱状または不規則な部品のあらゆる面を平らな位置に戻すことができます。このクラスは、複数の平面に継ぎ目がある一般的な製造、溶接、ブラケット、フレーム、機械ベースに最も多用途です。 EVST の 2 軸カタログには、L タイプ、U タイプ、C タイプ、プラットフォーム タイプの構成が含まれており、主にテーブル サポートと大型部品の周囲の傾斜クリアランスが異なります。
3 軸ポジショナ
3 軸ポジショナは、回転、傾斜、および 3 番目の動力による動き (通常は 2 番目の旋回または垂直上昇) を組み合わせます。追加された軸により、継ぎ目が平らになるだけでなく、ロボットに対して一定の作業高さと方向に保たれるため、大型または背の高いアセンブリでのプログラミングが簡素化されます。 EVST では、これらの重量があり、ジオメトリが豊富なアプリケーション向けに、垂直回転および水平回転の 3 軸サーボ ポジショナをリストしています。
| クラス | パワーモーション | に適しています | 一般的な組み合わせ |
|---|
| 単一軸 | 回転のみ | パイプ、シェル、フランジ、シャフト、円周継ぎ目 | 手動または単一ロボット、固定トーチ |
| 2 軸 | 回転 + 傾き | 複数面の継ぎ目を備えた溶接、フレーム、ブラケット | 手動またはロボット、一般的な製造 |
| 3 軸 | 回転 + 傾斜 + 2 番目の回転/揚力 | 大規模、高さ、またはジオメトリが豊富なアセンブリ | ロボット セル、協調動作 |
主軸台/心押し台とターンテーブル:よくある混乱点
バイヤーは、「ポジショナー」と「主軸台/心押し台」のどちらが必要かよく尋ねます。これらの用語は、競合するカテゴリではなく、そのパーツがどのようにサポートされるかを説明します。ターンテーブル スタイルのポジショナーは、片側が片持ち梁になった 1 つの回転テーブル上に部品を置きます。主軸台と心押し台の配置は、長いパーツを両端でサポートします。一方の端は駆動され、他方の端はアイドル状態になります。そのため、旋盤と同様に、パーツは安定した中心線上で回転します。
長さと細さが選択を決定します。短くコンパクトなパーツは 1 台のターンテーブルに快適に収まります。長いシャフト、ビーム、ローターは片持ち梁の場合、たわんだり揺れたりするため、主軸台/心押し台が適切な解決策となります。非常に長い部品の場合は、独自の動力付きサポートまたは中間振れ止めを備えた心押し台により、たわみが許容範囲内に保たれます。実際には、EVST エンジニアは、1 台のマシンに両方のタスクをうまく実行させるのではなく、コンパクトなブラケット用の 2 軸テーブルと長いフレーム用の主軸台/心押し台という 2 つのステーションのセットアップを設計することがよくあります。
選択を促進する仕様
クラスを選択すると、パラメーターの簡潔なリストによって正確なマシンが決定されます。これらは、サプライヤーが見積もる必要がある数値であり、購入者がファミリーの中で最も重い最大の部品と照らし合わせて確認する必要がある数値です。
- 定格荷重 — テーブルが運ぶ最大質量。裸のパーツではなく、パーツとその固定具に対するサイズです。
- 重心と偏心 — 部品の重心がテーブル面から遠ざかり、回転軸から離れると、耐荷重が減少します。軸上に CoG がある負荷に対して定格されたポジショナーは、同じ質量が中心から外れて取り付けられると過負荷になる可能性があります。
- 回転速度とトルク — 最大直径の溶接移動速度と一致させ、継ぎ目での表面速度がプロセス ウィンドウ内に収まるようにする必要があります。
- 傾斜範囲と速度 — 2 軸および 3 軸ユニットの場合、各継ぎ目を平らにする角度の移動量。通常、フレームのタイプに応じて最大 90 度または 135 度です。
- テーブルの直径と T スロット パターン — フィクスチャの取り付け方法と、面がサポートする最大パーツ サイズを定義します。
- グランド/スリップリングの電流経路 — 溶接の場合、ポジショナーはベアリングにアークを発生させることなく、回転ジョイント全体に電流を流す必要があります。これは、溶接定格のスリップ リングが提供します。
最も一般的なサイジングエラーは、偏心荷重を無視してワークピースの重量のみでポジショナを評価することです。回転軸から質量をオフセットして取り付けられた重量部品は、ドライブがあらゆる角度で保持しなければならない回転モーメントを課します。定格傾斜トルクまたは回転トルクを超えると、負荷がかかった状態で失速したり逆走したりすることがあります。 EVST は、安全制限は質量の位置によって異なるため、単一の見出しの数値ではなく、リクエストに応じてモデルごとの荷重とモーメントの制限を公開します。
手動位置決めとロボット位置決め
ポジショナーは 2 つの異なるマスターにサービスを提供します。手動または半自動の工場では、オペレータがインデックスを制御しながら、人間の溶接工に快適な高さと角度で縫い目を提示するだけです。ロボット セルでは、ポジショナーが調整された動作軸になります。ロボット コントローラーがポジショナーとアームを一緒に駆動するため、トーチとシームが連動して動き、湾曲溶接または複合溶接を通じて理想的な作業角度が維持されます。
ロボット溶接ポジショナは、調整された動作によって単純なターンテーブルと区別されます。ポジショナのサーボ軸はロボット コントローラによって制御されるか、ロボット コントローラと緊密に同期する必要があります。そのため、ロボット グレードのポジショナでは、可変周波数モーターではなくアブソリュート エンコーダを備えたサーボ ドライブが使用されます。電源、ロボット、ポジショナーの見積もりを含む完全なセル構築については、EVST の溶接ロボット セル選択ガイドを参照してください。
選択方法:5 段階のパス
<オル> パーツ ファミリのプロファイルを作成します。 セルが処理しなければならない最大、最も重く、最も扱いにくい部品をリストします。平均ではなく、最悪の場合のサイズを考慮する
軸数を修正します。 回転 - 円筒部品のみ。複数面の継ぎ目に傾斜を追加します。 3 番目の軸は、大きいジオメトリまたは背の高いジオメトリでロボットの下で一定の作業高さが必要な場合にのみ追加します。
保持方法を選択します。 コンパクトな部品用の単一ターンテーブル。たわむ可能性のある細長い部品の主軸台/心押し台
偏心のある荷重を確認します。 軸上の裸の部品の重量だけでなく、治具を含む実際の重心オフセットで定格荷重を確認してください。
溶接インターフェースを一致させます。 電流経路用の溶接定格スリップ リング、ロボット調整用のサーボ制御、プロセスに合わせた移動速度
ペイロードおよび傾斜/回転要件に対する EVST のポジショナ ラインのモデルごとのウォークスルーと、見積書へのパスについては、コンパニオン ガイドである EVST 溶接ポジショナ選択 2026 を参照してください。ポジショナと代替ワークピースハンドリング機械を比較するには、溶接ポジショナ、ターンテーブル、マニピュレータを参照してください。
EVST の溶接ポジショナ範囲
EVST は成都に本社を置き、温嶺で製造を行っており、ロボット溶接ポートフォリオの一部として 3 軸クラスすべての溶接ポジショナを製造しています。公開範囲は、1 軸ユニット (メインボックスサーボ、水平サーボ、ヘッド &テールストック)、2 軸ユニット (L タイプ、U タイプ、C タイプ、およびプラットフォームタイプ)、および 3 軸サーボポジショナ (垂直回転および水平回転) をカバーしています。定格荷重、テーブル サイズ、傾斜範囲は、ご要望に応じて用途ごとにお見積もりいたします。安全容量は質量だけではなく部品の形状と重心オフセットによって決まるためです。
EVST の認証記録によると、同社のロボットおよび溶接自動化生産ラインは IATF 16949 自動車グレードの品質認証を取得しており、その製品は CE、SGS、および TUV の第三者認証を取得しています。ポジショナーは通常、EVST の QJAR 溶接ロボットおよび電源統合とともに完全な溶接セルの一部として供給されるため、回転軸と傾斜軸はスタンドアロンのテーブルとしてではなく、アームとの協調動作として作動します。
よくある質問
溶接ポジショナーは何に使用されますか?
溶接ポジショナーは、ワークピースを回転、傾斜、または持ち上げて、各溶接シームを溶接の品質と溶着速度が最も高くなる平らな位置または水平な位置にすることができます。これにより、溶接の品質が向上し、位置ずれの溶接を回避することでスループットが向上します。また、ロボット セルでは、単一の連続プログラムで 1 つのアームで複雑な部品を溶接できます。
1 軸、2 軸、3 軸ポジショナの違いは何ですか?
単軸ポジショナーは 1 つの軸上で部品を回転させ、円筒形の部品や円周の継ぎ目に適しています。 2 軸ポジショナーにより傾斜が追加されるため、箱状パーツの複数の面の継ぎ目を平らに表示できます。 3 軸ポジショナーは、2 番目の旋回または垂直リフトを追加します。これは、ロボットが継ぎ目を一定の高さと方向に保持する必要がある大規模または背の高いアセンブリで使用されます。
ターンテーブルの代わりに主軸台/心押し台が必要になるのはどのような場合ですか?
シャフト、ビーム、ローターなど、片側だけで支えると垂れたり、たわんだりする部品が長い、または細い場合は、主軸台/心押し台を使用します。駆動主軸台と遊動心押し台が部品を安定した中心線上に保持するため、部品は正確に回転します。短くてコンパクトなパーツは、単一の回転ターンテーブルに載せることができます。
溶接ポジショナーのサイズを正しく設定するにはどうすればよいですか?
治具を含むファミリー内で最も重い最大の部品のサイズを確認し、回転軸上の裸重量だけでなく、実際の重心オフセットでの定格荷重を確認します。偏心荷重により、ドライブはあらゆる角度で保持しなければならない回転モーメントが生じます。これを無視することは、最も一般的なサイズ設定エラーです。最悪の場合のオフセットに対する回転と傾斜のトルクをサプライヤーに確認してください。
溶接ポジショナーはロボットと連携できますか?
はい。ロボットセルでは、ポジショナーはロボットコントローラーによって駆動または同期される調整された動作軸となり、トーチとシームが一緒に動き、理想的な作業角度を保持します。ロボットグレードのポジショナは、絶対エンコーダを備えたサーボドライブと溶接定格のスリップリングを使用して、回転ジョイントに電流を流します。これが、ロボット溶接ポジショナーと単純なターンテーブルの違いです。
次の目的地
ポジショナを特定の積載量および傾斜/回転要件に合わせて見積もりへのパスを設定するには、単軸から 3 軸までの EVST 溶接ポジショナの選択に関する EVST 製品サイトのガイドを参照してください。ポジショナーと他のハンドリングマシンのどちらを使用するかを決定するには、「溶接ポジショナー、ターンテーブル、マニピュレーター」をお読みください。完全なロボット溶接セルについては、溶接ロボット ガイドとセル選択ガイドを参照してください。調達に関する質問については、お問い合わせページから EVST の営業にお問い合わせください。
著者について:EVST 編集チームは、自動化プロジェクトを評価するエンジニアや運用リーダー向けに産業用ロボットとインテリジェント製造について執筆しています。 EVST (EVS TECH CO., LTD) は、2018 年に成都で設立され、QJAR、協働ロボット、SCARA、デルタ製品ファミリー全体で IATF 16949 自動車グレード認証と CE / SGS / TUV サードパーティ認証を取得し、600 以上の自動化プロジェクトを提供し、100 カ国以上に出荷してきました。


