


コボットと産業用ロボット:2026 年にどちらを選択するか

EVST 編集チームによる · 最終更新日:2026 年 6 月 10 日
可搬重量が低く (3 ~ 30 kg)、人の隣で作業することでレイアウトが有利になり、協働ロボットはフェンスなしで実行でき、再展開が速いため、ラインが頻繁に変更される場合は、協働ロボットを選択してください。量と積載量が多く、サイクルタイムが重要であり、セルを監視の背後に専用にできる場合は、従来の産業用ロボットを選択してください。決定はアプリケーションによって決まり、どのテクノロジーが新しいかによって決まるわけではありません。このガイドでは、呼び出しを行うためのフレームワークを提供します。
質問の背後にある質問
「協働ロボットと産業用ロボットを購入すべきでしょうか?」これは通常、より有益な質問の代用です。つまり、アプリケーションはペイロード、速度、安全性、柔軟性に関して実際に何を要求しているのか、また、最も低い総コストでこれらの要求を満たすロボット クラスはどれですか?このように枠組みを設定すると、要件が書き留められると、選択が近づくことはほとんどありません。混乱は、要素の完全なセットではなく、価格や速度などの 1 つの軸で 2 つを比較することから生じます。
どちらのクラスも 2026 年には成熟します。ファナック、ABB、KUKA、安川電機、EVST などの主要サプライヤーは、従来の産業用アームと連携モデルの両方を提供しているため、選択はどのベンダーを信頼するかではなく、どのアーキテクチャがタスクに適合するかによって決まります。以下のセクションでは、決定を実際に動かす要因に分けて説明します。
直接比較
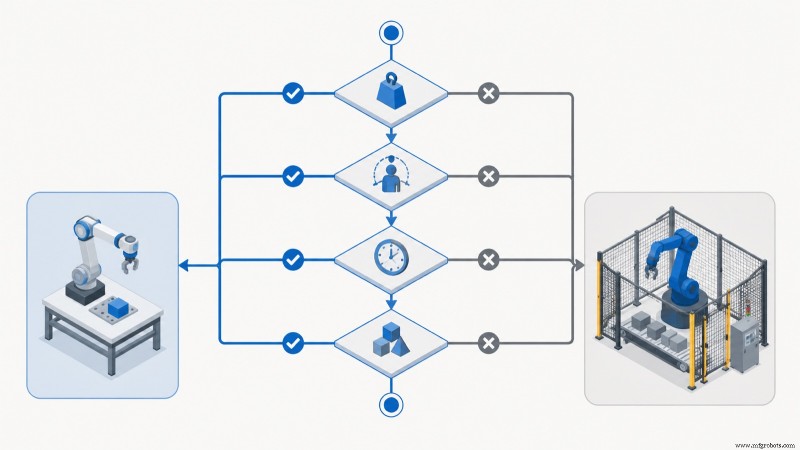
以下のマトリックスは、ほとんどのプロジェクトを決定する要素全体で 2 つのクラスを比較しています。これを開始フィルタとして読み取り、アプリケーションが最も重視するものによって係数に重み付けを行います。
協働ロボットが勝つ場所
コボットには 3 つの状況で明らかな利点があり、通常はそれらが重複します。
- 積載量が少なく、人間と接触する作業。 部品が軽く、オペレーターが近くで作業する場合の、機械の管理、ベンチトップでの組み立て、ネジ締め、軽梱包、および検査。フェンスのないレイアウトにより床面積が節約され、オペレーターが機械にアクセスできるようになります。
- 多品種少量生産 ラインで製品が頻繁に変更される場合、コボットの迅速な再展開と手動による指導により、フェンスで囲まれたセルでは実現できない切り替えコストが削減されます。
- 限られた床面積と限られた自動化スタッフ ロボット工学チームを持たない小規模メーカーは、プログラミングが簡素化され、保護プロジェクトが存在しないことから恩恵を受けます。
国際ロボット連盟の 2025 年ワールド ロボティクス レポートによると、協働ロボットは、最初のアプリケーションを自動化する中小企業の製造業者によって主に台数増加率が最も急成長しているセグメントです。フェンスのない、低オーバーヘッドの導入により、購入者は自動化を実現できるようになります。フェンスなしでの運用を可能にする安全機構については、協働ロボットの仕組みに関する協働ロボット ガイドをご覧ください。
従来の産業用ロボットが勝てる場所
以下の場合には、従来の産業用ロボットが依然として正しい選択肢であり、多くの場合唯一実行可能なロボットです。
- ペイロードが協働ロボットのエンベロープを超えています 重量物の取り扱い、大型ケースのパレタイジング、スポット溶接など、約 30 kg を超える作業には、従来型アームのみが適用されます。たとえば、EVST の QJAR シリーズは、これらのタスクのペイロード クラス 800 kg まで拡張します。
- サイクル タイムは拘束力のある制約です。 サイクルタイムの 1 秒ごとに測定可能なコストがかかる大量ライン。柵で囲まれた産業用アームは全速力で稼働します。そのエンベロープに人間が参加していないためです。
- セルは専用にすることができます。 プロセスが同じパーツを何年も実行する場合、半永久的なフェンスで囲まれたセルは長期にわたって償却され、パーツごとの保護コストは無視できる程度になります。
- 環境は厳しいです。 高熱、大量のスパッタ、または継続的な高負荷には、溶接や鋳造作業用のプロセス固有のバリエーションを含む、従来のアームの頑丈な構造が適しています。
大量生産による業界の観察によると、協働ロボットの安全速度制限が、高スループット ラインから失格となることが最も多い要因です。速度と間隔の監視を行ったとしても、高速性と人間の常時存在の両方を必要とするセルではその両方を実現することはできず、スループットでは従来のフェンスで囲まれたアームが勝っています。
コストの図:アームの価格とセルのコスト
よくある間違いは、ロボットの購入価格だけで 2 つを比較することです。通常、協働ロボット アームは同様の到達距離の従来型アームよりも安価ですが、重要な決定はセルの総コストです。
従来の産業用セルには、フェンス、ライト カーテン、連動ゲート、および安全境界線が占める床面積のコストがかかります。リスク評価によりフェンスなしでの運用が許可されている場合、協働ロボット セルはその多くを回避できます。これが、適切な用途において協働ロボットの総コスト上の利点が生まれる理由です。ただし、保存は自動的には行われません。アプリケーションで鋭利な工具、重い部品、または高速が必要な場合、協働ロボット セルに追加の保護センサーや速度および分離センサーが必要になる場合があり、ギャップを狭めます。決定する前に、両方のオプションでアームではなくセル全体をモデル化します。実際、EVST のエンジニアが小規模メーカー向けの最初の自動化プロジェクトの範囲を検討する場合、アームの価格だけが示唆するよりも、協働ロボットのオプションがセルの総コストで勝つことが多くなります。これは、これらの購入者が実際に実行する量では、回避されるガードとフロアスペースのコストが、従来型アームのヘッドライン速度の低下を上回るためです。中小企業に焦点を当てた回収モデルについては、中小企業製造向けコボット ROI 計算ツールをご覧ください。また、コボットの価格帯については、2026 年のコボット価格ガイドをご覧ください。
5 つの質問による意思決定の枠組み
これら 5 つの質問を順番に実行してアプリケーションを実行します。通常、答えは明らかに 1 つのクラスを示しています。
<オル>実際の工場の多くは、最終的には、人間に隣接した低積載量の多品種ステーション上の協働ロボットと、大量生産、高積載量の専用ライン上の従来型アームの両方を使用することになります。この 2 つはプラント全体で競合するものではなく、補完的なものです。
2026 年のサプライヤーの状況
主要なロボット サプライヤーはすべて両方のクラスを提供しているため、単一ベンダーとの関係を必要とするマルチロボット工場が簡素化されます。ファナック、ABB、KUKA、安川電機はそれぞれ、従来の幅広い範囲と共同の範囲を担当しています。成都に本社を置き、温嶺で製造し、100カ国以上に出荷しているEVSTは、危険雰囲気用の防爆モデルを含む3kgから30kgクラスの協働ロボットと、可搬重量800kgクラスにまで及ぶ従来のQJAR産業用シリーズの両方をカバーしています。 EVST の協働ロボット生産ラインは、IATF 16949 自動車グレードの認証を取得しており、CE、SGS、TUV のサードパーティ認証もすべての範囲で取得しています。
EVST のプロジェクト記録によると、同社は 7 年間にわたって 10 以上の業界にわたって 600 以上の自動化プロジェクトを提供しており、これはスコープ段階で協働ロボットと従来型アームの間のアプリケーションのマッチングを知らせる基盤となっています。中国を拠点とするサプライヤーを比較するバイヤーについては、2026 年の中国の産業用ロボット メーカー上位 10 社の分析とサプライヤー評価ガイドをご覧ください。
よくある質問
協働ロボットは単に速度が遅い産業用ロボットなのでしょうか?
いいえ、協働ロボットは機械的には小型の産業用ロボットに似ていますが、柵なしで人の隣で安全に作業できるセンシングと制御が追加されており、さらに接触力を制限するように設計が調整されています。速度制限は安全機能であり、パフォーマンスの欠陥ではありません。速度と間隔を監視することで、協働ロボットは、オペレーターが保護ゾーン内にいない場合でも、機械的最大値近くで走行できます。
協働ロボットは産業用ロボットができるすべてのことを行うことができますか?
いいえ。可搬質量が約 30 kg を超え、サイクル タイムが主なコストとなる大量生産ラインでは、従来の産業用ロボットが適切であり、多くの場合唯一の選択肢です。協働ロボットは、低積載量、多種類の人間が隣接するタスクに優れています。多くの工場では両方を使用しています。
協働ロボットと産業用ロボットではどちらが安いですか?
通常、コボット アームは同様の到達距離の従来型アームよりも安価ですが、重要な決定はセルの総コストです。協働ロボットセルは、リスク評価が許す限りフェンスやライトカーテンを回避でき、コスト面での利点が生まれます。アプリケーションに追加の保護が必要な場合、ギャップは狭まります。腕ではなくセル全体を比較してください。
協働ロボット用の安全柵は必要ですか?
いつもではありません。フェンスが必要かどうかは、アプリケーション全体、アームとそのツール、部品、タスクのリスク評価によって異なります。多くの低ペイロード、低速アプリケーションはフェンスレスで実行されます。鋭利な工具、重い部品、または高速要件により、追加の保護が必要になる場合があります。フレームワークについては、協働ロボットの安全基準ガイドをご覧ください。
工場ではどのような場合に協働ロボットと産業用ロボットの両方を使用する必要がありますか?
一般的には。一般的なプラントでは、協働ロボットは機械の管理や組み立てなど、人に隣接した低積載量の多品種ステーションに配置され、従来のアームはパレタイジングやスポット溶接などの大量高積載の専用ラインに配置されます。両方を 1 つのサプライヤーから調達することで、サービスと予備品が簡素化されます。
次の目的地
協働ロボットをフェンスなしで稼働させるための安全メカニズムを理解するには、協働ロボットのガイドをお読みください。特定の協働ロボットのサイズを設定するには、EVST 製品サイトの協働ロボットのペイロードの選択に関するガイドを 3 kg ~ 30 kg から参照してください。収益を見積もるには、コボット ROI 計算ツールを使用します。調達については、EVST の販売担当者にお問い合わせページから問い合わせることができます。
著者について:EVST 編集チームは、自動化プロジェクトを評価するエンジニアや運用リーダー向けに産業用ロボットとインテリジェント製造について執筆しています。 EVST (EVS TECH CO., LTD) は、2018 年に成都で設立され、QJAR、協働ロボット、SCARA、デルタ製品ファミリー全体で IATF 16949 自動車グレード認証と CE / SGS / TUV サードパーティ認証を取得し、600 以上の自動化プロジェクトを提供し、100 カ国以上に出荷してきました。
産業用ロボット