


飛行時間テクノロジーは精度の向上を約束します
アナログ・デバイセズ(ADI)とマイクロソフトは、シーンの状態に関係なく、より高い精度を提供することを目的として、飛行時間(ToF)3Dイメージングソリューションを作成するために協力しました。 ADIは、MicrosoftのAzure Kinect 3D ToFテクノロジーを活用し、その技術的なICとシステムの専門知識を追加して、採用しやすいソリューションを作成します。目標は、インダストリー4.0、自動車、ゲーム、拡張現実、計算写真やビデオ撮影などの分野で幅広い視聴者にリーチすることです。
業界市場のアナリストは、困難な環境で使用される3Dイメージングシステムの力強い成長を予測しており、インダストリー4.0を実現するには、ヒューマンコラボレーションロボット、ルームマッピング、在庫管理システムなどの最先端のアプリケーションが必要です。 ToFアプリケーションは、乗員検出機能とドライバー監視機能を備えた、より安全な自動車の運転環境を作成するためにも必要です。
EE Timesとのインタビューで、強化されたイメージングと解釈のシニアディレクターであるTonyZarolaとAnalogDevicesの戦略的マーケティングマネージャーであるCarlosCalvoは、このコラボレーションの基盤を強調しました。 ザロラは言った、“ マイクロソフトは、イメージセンサーメーカー全体の3D ToFパフォーマンスのベンチマークになり、ADIが構築しているセンサーとソリューションの基盤であるコアピクセルテクノロジーをADIに提供しています。何十年にもわたって、IntelligentEdgeまたはIntelligentCloudで実行する最高のデータキャプチャと革新的なアルゴリズムに必要な専門知識を開発してきました。シリコン、システム、ソフトウェア、光学分野でマイクロソフトとADIの最高の機能を組み合わせることを楽しみにしています。」
3DToFデザイン
ジェスチャの認識は、人体の一連の動きを識別するデバイスの機能です。電子技術は、2Dまたは3Dプロファイルでシーンを識別およびスキャンするためのカメラとICの支援に基づいています。飛行時間技術は、ターゲットにレーザービームを送信し、信号の反射を分析することで構成されます。
3D飛行時間(3D ToF)は、スキャナーのないLIDAR(光検出および測距)の一種で、ナノ秒単位の高出力光パルスを使用して、シーンから深度情報(通常は短距離)をキャプチャします。さまざまなICソリューションは、ジェスチャ認識ソフトウェアアルゴリズムの助けを借りて、受信した画像の深度マップを作成し、体の動きにリアルタイムで応答します。ジェスチャ認識テクノロジーの主な利点は、個人と制御システムの間に物理的な接触が必要ないことです。
ToFカメラは、変調されたレーザー光とレーザー波長感知センサーを介して物体を照らし、反射光を取り込むことで距離を測定します。センサーは、光が放射されてから反射光がカメラに受け取られるまでの時間遅延を測定します。時間遅延の測定にはいくつかの方法があり、そのうちの2つが一般的になっています。連続波(CW)法とパルス法です。 ToFセンサーの大部分はCWであり、CMOSセンサーを使用しています。
飛行時間(ToF)の測定を困難にする多くの交絡因子があります。干渉する周囲光、シーン内のオブジェクトに当たって跳ね返る光によって引き起こされるマルチパス効果、真の距離、温度効果、範囲のあいまいさなどです。 「課題は、シリコンの開発から、部品の理論的な合計に沿って機能する完全なシステムの作成にまで及びます」とCalvo氏は述べています。 「各コンポーネントを個別に見ることは不可能です。たとえば、最高のセンサーを備えているが最適化されていないレンズが取り付けられているToFカメラでは、システム全体のパフォーマンスが低下します。」
「表面的には、ToFカメラはRGBカメラと類似しています。重要な違いの1つは、アプリケーションによっては、RGBカメラの画質がある程度の主観で判断されることです。他のアプリケーションは、高度な後処理によってのみ有効になります。 ToFカメラは、アプリケーションに応じて、ユーザーが画像の精度に大きく依存する可能性のある客観的な物理量(距離)を測定します。レンズフレアなどのRGBカメラの一部の光学的欠陥は、芸術的と見なされることがあるアーティファクト(太陽光フレアなど)を生成する可能性があります。 ToFシステムでは、レンズフレアを大幅に最小化しないと、物体からの強い反射があるとシステム全体のパフォーマンスが低下する可能性がある、とCalvo氏は付け加えました。」
飛行時間に使用されるCMOSセンサーは、エミッターとレシーバーの両方で構成されています。これにより、160 fpsに近いパフォーマンスで、単一ピクセルレベルでオブジェクトの距離を計算できます。
「シリコンレベルでは、信号チェーンの重要な要素を考慮する必要があります。レーザードライバー、読み取り機能が統合されたToFイメージセンサー、そして最後に深度計算エンジンです。課題は、イメージセンサー自体に高い応答性と高い変調コントラストを備えたピクセルの設計から始まり、次のアプリケーション層で解釈できる3D点群の形成で終わります。
「コンポーネントを除いて、オプトメカニカル設計、キャリブレーション、電気設計、ソフトウェアの実装はすべて時間がかかり、困難であるため、重要な課題はデプスカメラの設計と製造に起因します。アナログ・デバイセズ(ADI)は、お客様が設計プロセスを容易にするためにこれらの課題に取り組んでいます」とCalvo氏は述べています。
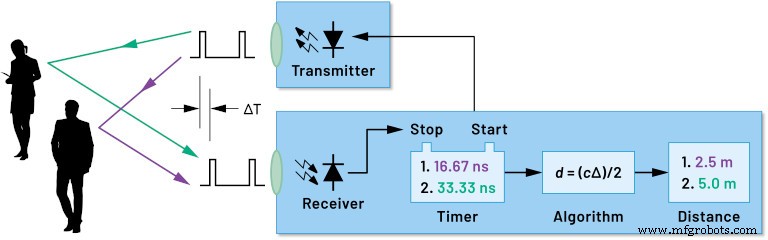
図1.ToFブロック図。 (出典:ADI)
ピクセルはシーンの異なる部分から光を集め、それらの再結合が再構成された画像を構成します。すべてのセンサーピクセルは、復調ブロックと変調ブロックの間の相関によって制御されます。各ピクセルは、図2に示すモデルで近似できます。
電流は、関連する制御信号をアクティブにすることにより、積分時間中にノードA(Da)またはノードB(Db)に送られます。システムがビットシーケンス全体を読み取ることができるように、復調が停止した状態で読み取りが行われます。 ClkAとClkBは、選択した変調周波数で時間tInt1の間180度位相がずれて変調されます。 ClkAおよびCLkBクロックに関して受信した光の位相によって、DA信号とDB信号が決まります。積分が終了すると、ClkAとClkBがオフになり、積分信号(BitlineAInt1-BitlineBInt1)をサンプリングすることで読み取りフェーズが実行されます。
光子の電流への変換は、ポアソン分布の量子プロセスによって制御されます。システムの良さを知るためのパラメータは、量子効率です。これは、生成される電子の数と、対応するピクセルをアクティブにする光子の数との比率です。電子の数は、実際の変調光と、ノイズ効果に対応する周囲光の両方に依存します。 Time-of-Flightシステムを設計するときに選択するパラメーターは、FoV(視野)です。 FoVは、シーンのカバレッジ要件に応じて適切に選択する必要があります。
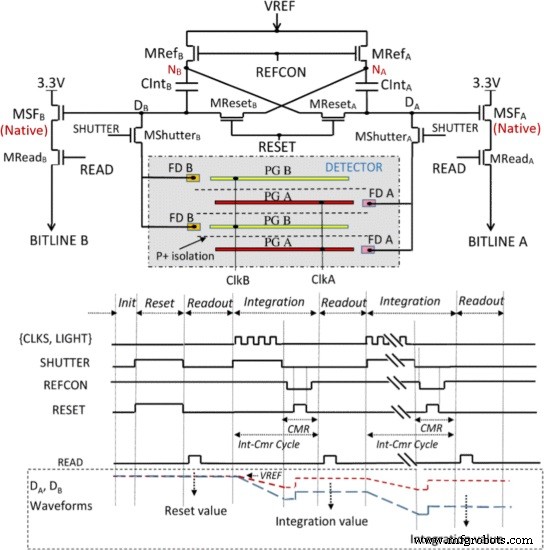
図2.ピクセルの電気回路とタイミング。 (出典:https://ieeexplore.ieee.org/document/6964815)
高周波で高効率を達成するために、効率的な飛行時間動作をサポートするためにわずかな変更を加えた0.13μmミックスドシグナル低電力CMOSプロセスを使用してチップを製造できます。
ADIとMicrosoft
MicrosoftとADIのコラボレーションは、ToFテクノロジーの強化を目的としています。ADIは、1ミリメートル未満の精度を提供し、Microsoftの深みであるIntelligent Cloudに基づいて、レドモンドの巨大なエコシステムと互換性のある新しいシリーズのToF3Dイメージセンサーを設計しています。およびIntelligentEdgeプラットフォーム。
「このコラボレーションは、消費者、産業、ヘルスケア、自動車など、すべての主要産業に影響を与えると強く信じています。これまで、Microsoftによって開発されたテクノロジは、拡張された商用アプリケーションに広く利用できませんでした。 Microsoftのイメージャテクノロジーを搭載したADIソリューションは、全面的にゲームチェンジャーになると信じています」とZarola氏は述べています。
より効率的な工場自動化のための安全対策を進めるとともに、顔認識を強化するためのセキュリティシステムの明らかなアプリケーションがあります。インダストリー4.0は、「人間のいない」領域に閉じ込められることなく、人間と一緒に安全に動作する協働ロボットによって変革され、ボックスとパレットの寸法のToF精度によって、ロジスティクスのさらなる最適化が可能になります。
Zarola氏は、次のように述べています。「より高度な占有検出により、エネルギー効率、安全システム、および人間と機械の相互作用が向上します。自宅から車まで、マイクロソフトとのToFコラボレーションにより、新しいゲームエクスペリエンスで、現実世界の仮想オブジェクトを配置して操作し、ドライバーと乗客を同様に監視することで、車との操作方法を変更し、安全性を高めることができます。 ToFテクノロジーの潜在的なユースケースは幅広く進化しているため、今日の主なアプリケーションは、明日は新しいアイデアに取って代わられると予想されます。」
ZarolaとCalvoは、顧客が広範囲の温度でミリメートル深度の解像度と細かい空間解像度をどのように望んでいるかを述べています。この種のパフォーマンスを実現するには、ハードウェアレベルとソフトウェアレベルの両方で達成される極端なレベルの時間同期が必要です。 「レーザーを制御する信号とセンサー内のピクセルの間の10psのタイミングのずれにより、最終的な距離の推定値に1.5mmの誤差が生じます。それが十分に難しくない場合は、飛行時間システムを広範囲の温度で正確に保つ必要があることに加えて、共同で設計する必要のある高度な処理とキャリブレーションアルゴリズムが必要です」とCalvo氏は述べています。
ToFシステムに対する具体的な批判は、システムが動作できる変調周波数と、ADIが最も集中している場所です。深度推定誤差のほとんどの原因は、変調周波数によって「分割」される傾向があります。 「私たちは、ToFシステムの平均変調周波数を上げて、より低い深度ノイズでの測定を可能にし、マルチパスまたは周囲光のショットノイズの悪影響を減らすことを目指しています」とZarola氏は述べています。
Zarola氏は、次のように述べています。「ADIは、深度カメラの設計と製造に時間がかかり、困難になる主要な課題の解決も目指しています。私たちは、画像キャプチャにおける従来の障害に加えて、機械的位置合わせ、光学設計、キャリブレーション、電気設計、およびソフトウェアの実装に取り組んでいます。」
HoloLens複合現実デバイスで使用されているMicrosoftのTime-of-Flight(ToF)3DテクノロジーとAzure Kinect開発キットをADIのカスタムソリューションと組み合わせることで、新世代の高性能アプリケーションを実装し、スケーラブルにすることができます。市場投入までの時間を最適化する。
>>この記事はもともと姉妹サイトのEETimes。
埋め込み