


その他の特殊モーター
隈取磁極誘導電動機
単相モーターに始動トルクを提供する簡単な方法は、主巻線に対して30°から60°で各極に短絡したターンを埋め込むことです。 (下の図)通常、ポールの3分の1は裸の銅ストラップで囲まれています。
これらのシェーディングコイルは、メインフィールドから30°から60°の間隔でタイムラグのある減衰フラックスを生成します。減衰されていない主成分とのこの遅れ磁束は、ローターを始動するための小さなトルクで回転磁界を生成します。
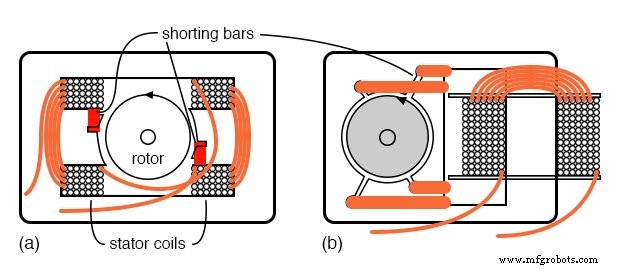
隈取磁極誘導モーター、(a)デュアルコイル設計、(b)小型シングルコイルバージョン
始動トルクが非常に低いため、隈取磁極モーターは50ワット未満の小さいサイズでのみ製造されます。低コストでシンプルなため、このモーターは小型ファン、空気循環装置、およびその他の低トルクアプリケーションに適しています。リアクタンスを直列に切り替えて電流とトルクを制限するか、モーターコイルタップを切り替えることで、モーター速度を下げることができます。
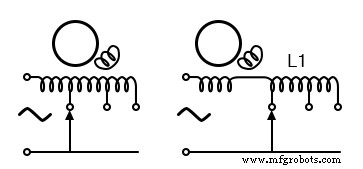
隈取磁極モーターの速度制御
2相サーボモーター
サーボモーター 通常、電子、機械、および電気部品を含むフィードバックループの一部です。サーボループは、モーターを介して物体の動きを制御する手段です。このような多くのシステムの要件は、迅速な対応です。
慣性による加速の奪い取りを減らすために、鉄心はローターから取り外され、シャフトに取り付けられたアルミニウムカップだけが回転します。鉄心は、磁気回路を完成させるために静的な(回転しない)コンポーネントとしてカップ内に再挿入されます。
それ以外の場合、構造は2相モーターの典型です。低質量ローターは、かご形ローターよりも速く加速できます。

高加速度2-φACサーボモーター
1つの相は単相線に接続されています。もう1つはアンプによって駆動されます。巻線の1つは90 °で駆動されます 位相シフトされた波形。上の図では、これは電力線巻線の直列コンデンサによって実現されています。
もう一方の巻線は、可変振幅の正弦波によって駆動され、モーター速度を制御します。波形の位相が反転する場合があります(180 ° 位相シフト)モーターの方向を逆にします。この可変正弦波はエラーアンプの出力です。
シンクロCTセクションを参照してください。 例えば。航空機の操縦翼面は、400Hzの2φサーボモーターで配置できます。
ヒステリシスモーター
誘導電動機の低ヒステリシスSi鋼積層ローターを硬化磁石鋼のスロットレス巻線レスシリンダーに置き換えると、ヒステリシス、またはローター磁化の遅れが大幅に強調されます。
結果として生じる低トルク同期モーターは、ストールから同期速度まで一定のトルクを発生させます。トルクが低いため、ヒステリシスモーターは非常に小さいサイズでのみ使用可能であり、クロックドライブや以前の蓄音機ターンテーブルなどの定速アプリケーションにのみ使用されます。
渦電流クラッチ
誘導電動機または同期電動機の固定子が回転子とは独立して回転するように取り付けられている場合、渦電流クラッチが発生します。コイルはDCで励起され、機械的負荷に接続されます。
かご形回転子は駆動モーターに取り付けられています。駆動モーターは、クラッチへのDC励起なしで始動します。 DC励起は、ゼロから目的の最終値まで調整され、連続的かつスムーズに可変トルクを提供します。
渦電流クラッチの操作は、アナログ渦電流自動車速度計に似ています。
概要:その他の特殊モーター
- 隈取磁極誘導モーター 、50ワット未満の低トルクアプリケーションで使用され、固定子の短絡ターンから第2相を発生させます。
- ヒステリシスモーター かつて時計や蓄音機で使用されていた小型の低トルク同期モーターです。
- 渦電流クラッチ 調整可能なトルクを提供します。
産業技術