


Selsyn(Synchro)Motors
通常、巻線型ローター誘導モーターのローター巻線は、始動後に短絡します。始動中は、始動電流を制限するために、抵抗を回転子巻線と直列に配置することができます。これらの巻線が共通の始動抵抗に接続されている場合、2つのローターは始動中に同期されたままになります。
これは、始動時に2つのモーターを同期させる必要がある印刷機や跳ね橋に役立ちます。始動してローターが短絡すると、同期トルクは発生しません。始動時の抵抗が大きいほど、一対のモーターの同期トルクが高くなります。
始動抵抗を取り外しても、ローターが並列になっている場合、始動トルクはありません。ただし、かなりの同期トルクがあります。これは selsyn と呼ばれます 、これは「自己同期」の略語です。
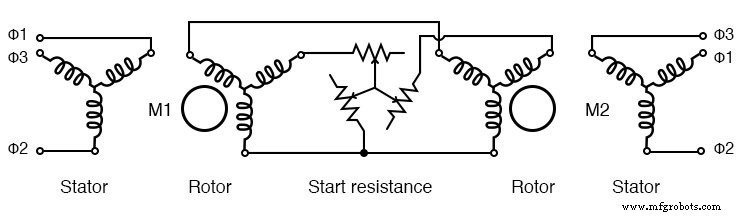
一般的な抵抗器から巻線型ローター誘導モーターを始動する
ローターは静止している場合があります。一方のローターが角度θだけ移動すると、もう一方のセルシンシャフトは角度θだけ移動します。一方のセルシンに抗力を加えると、もう一方のシャフトを回転させようとしたときにこれが感じられます。
マルチ馬力(マルチキロワット)のセルシンが存在しますが、主なアプリケーションは、計装アプリケーション用の数ワットの小さな単位であり、リモート位置表示です。
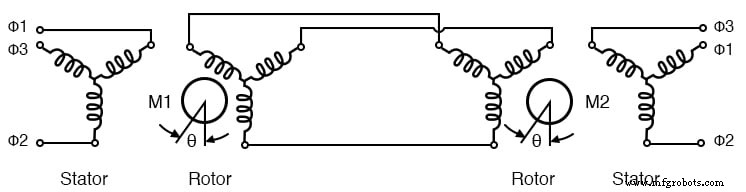
抵抗を開始しないセルシン
計装セルシンは、抵抗器の始動には使用できません(上の図)。それらは自己回転することを意図していません。ローターが短絡したり、抵抗が負荷されたりしないため、始動トルクは発生しません。
ただし、1つのシャフトを手動で回転させると、並列ユニットのシャフトが追従するまで、ローター電流のバランスが崩れます。三相電源の共通電源が両方の固定子に適用されることに注意してください。上に三相ローターを示していますが、下の図に示すように、単相動力ローターで十分です。
送信機-受信機
シンクロとしても知られる小さな計装セルシン は、単相並列AC通電ローターを使用し、外部から通電されていない3相並列ステーターを保持します。以下に示すのは、回転変圧器としてのシンクロ機能です。
両方のトルクトランスミッターのローターの場合 (TX)およびトルクレシーバー (RX)は同じ角度であり、誘導された固定子電圧の位相は両方で同じであり、電流は流れません。
一方の回転子がもう一方の回転子からずれている場合、固定子の相電圧は送信機と受信機で異なります。固定子電流はトルクを発生させて流れます。受信機のシャフトは、送信機のシャフトに電気的に従属します。送信機または受信機のシャフトを回転させて、反対側のユニットを回転させることができます。
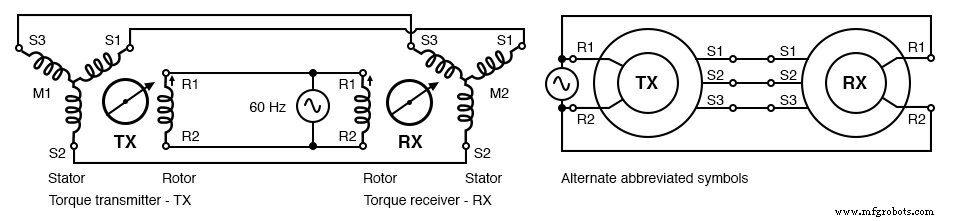
シンクロには単相電源ローターがあります
シンクロ固定子は、外部端子に引き出された三相巻線で巻かれています。トルク送信機または受信機の単一の回転子巻線は、ブラシをかけられたスリップリングによって引き出されます。シンクロ送信機と受信機は電気的に同一です。
ただし、シンクロレシーバーには慣性ダンピングが組み込まれています。トルクレシーバーの代わりにシンクロトルクトランスミッターを使用することもできます。
リモート位置検知は、主要なシンクロアプリケーションです。たとえば、レーダーアンテナに接続されたシンクロ送信機は、制御室のインジケーターにアンテナの位置を示します。
風見鶏に接続されたシンクロ送信機は、リモートコンソールで風向を示します。シンクロは、240 Vac 50 Hz、115 Vac 60 Hz、115 Vac 400 Hz、および26 Vac 400Hzの電力で使用できます。
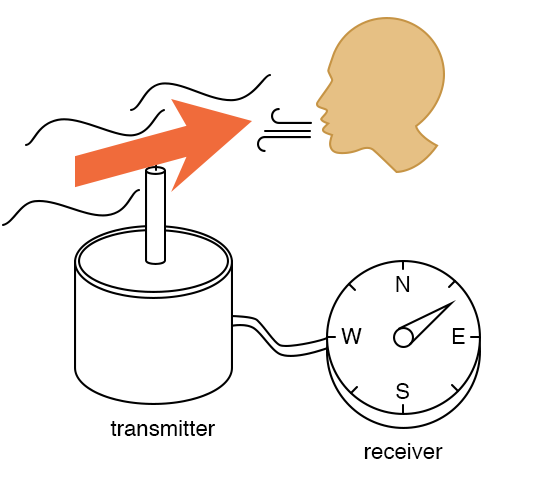
Synchroアプリケーション:リモート位置表示
差動送信機-受信機
シンクロ差動送信機 (TDX)には、三相ローターとステーターの両方があります。シンクロ差動送信機は、ローター入力の電気角度入力にシャフト角度入力を追加し、ステーター出力に合計を出力します。
この固定子の電気的角度は、RXに送信することで表示できます。たとえば、シンクロ受信機は、船の船首に対するレーダーアンテナの位置を表示します。シンクロ差動送信機による船のコンパス方位の追加により、船の方位に関係なく、真北を基準にしたRX上のアンテナ位置が表示されます。
TXとTDXの間の固定子リードのS1-S3ペアを逆にすると、角度位置が差し引かれます。
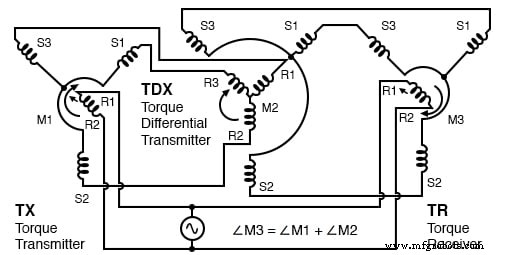
トルク差動送信機(TDX)
シンクロ送信機に接続された船上レーダーアンテナは、船首に対するアンテナ角度をエンコードします(下の図)。真北を基準にしたアンテナ位置を表示することが望まれます。
真北(∠antenna+∠gyro)に対するアンテナ角度を表示するには、ジャイロコンパスから船首相対アンテナ位置に向かう船を追加する必要があります。
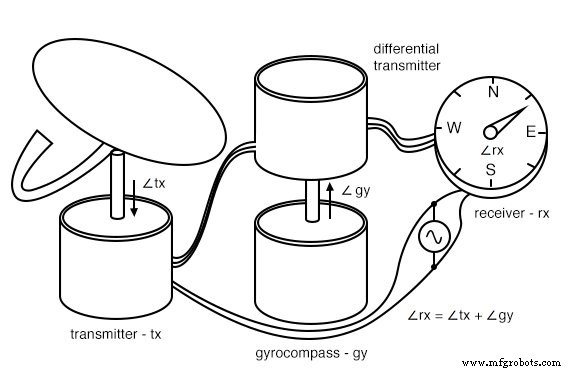
トルク差動送信機アプリケーション:角度加算
∠antenna-N=∠antenna+∠gyro ∠rx=∠tx+∠gy
たとえば、船の船首方位は∠30°、船首に対するアンテナ位置は∠0°、∠antenna-Nは次のとおりです。
∠rx=∠tx+∠gy ∠30°=∠30°+∠0°
たとえば、船の機首方位は∠30°、船首に対するアンテナ位置は∠15°、∠antenna-Nは次のとおりです。
∠45°=∠30°+∠15°
加算と減算
参考までに、TDX(トルクディファレンシャルトランスミッター)とTDR(トルクディファレンシャルレシーバー)の両方を使用したシャフト角度の減算と加算の配線図を示します。 TDXには、シャフトにトルク角度入力、3つのステータ接続に電気角度入力、3つのローター接続に電気角度出力があります。
TDRには、固定子と回転子の両方に電気角度入力があります。角度出力はTDRシャフトのトルクです。 TDXとTDRの違いは、TDXがトルク送信機であり、TDRがトルク受信機であるということです。
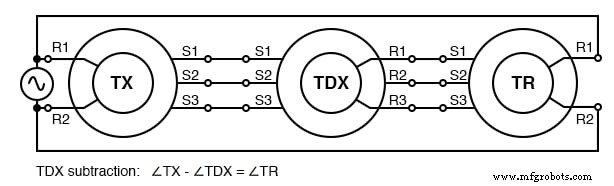
TDX減算
トルク入力はTXとTDXです。トルク出力角度差はTRです。
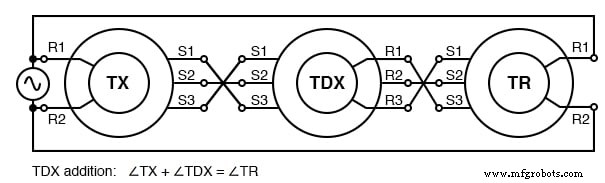
TDXの追加
トルク入力はTXとTDXです。トルク出力角度の合計はTRです。
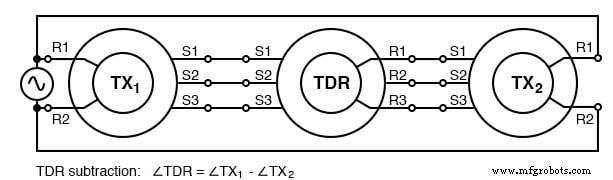
TDR減算
トルク入力はTX 1 です。 およびTX 2 。トルク出力角度差はTDRです。
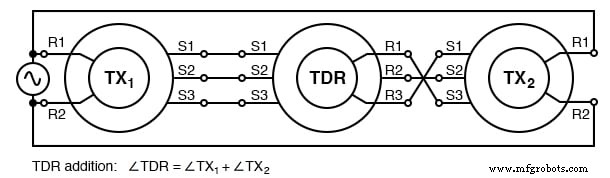
TDRの追加
トルク入力はTX 1 です。 およびTX 2 。トルク出力角度の合計はTDRです。
コントロールトランス
シンクロトランスミッターのバリエーションは、コントロールトランスです。 。 TXのように3つの等間隔の固定子巻線があります。そのローターは、送信機や受信機よりも多くの回転数で巻かれているため、通常はサーボによって回転するときに、ヌルを検出する際の感度が高くなります。 システム。
CT(Control Transformer)ローター出力は、ステーター磁場ベクトルに対して直角に向けられている場合はゼロです。 TXやRXとは異なり、CTはトルクを送信も受信もしません。これは単に高感度の角度位置検出器です。
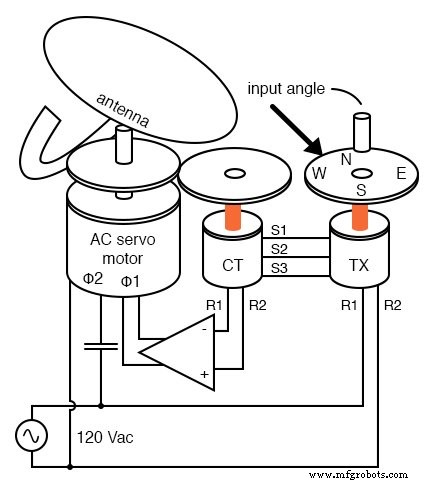
制御トランス(CT)がサーボヌルを検出します
上の図では、TXのシャフトがレーダーアンテナの目的の位置に設定されています。サーボシステムにより、サーボモーターがアンテナをコマンド位置に駆動します。 CTは、指令された位置を実際の位置と比較し、その指令された角度が達成されるまでモーターを駆動するようにサーボアンプに信号を送ります。
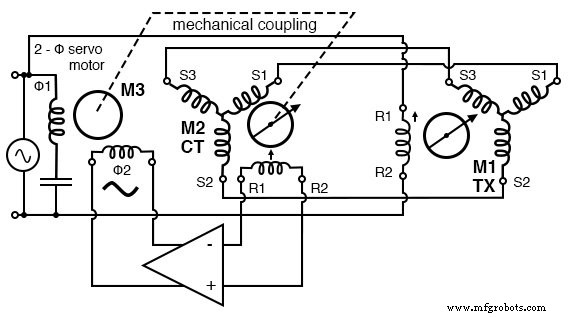
サーボはCTを使用してアンテナ位置nullを検知します
制御変圧器のローターが90 °でヌルを検出したとき 固定子フィールドの軸に対しては、回転子出力はありません。ローターの変位は、変位に比例したACエラー電圧を生成します。
サーボ 負のフィードバックによるコマンド変数と測定変数の間のエラーを最小限に抑えようとします。制御トランスは、シャフトの角度を、TXステーターによって送信されるステーターの磁場角度と比較します。
最小値またはヌルを測定すると、サーボはアンテナと制御トランスのローターを指令された位置に駆動します。測定位置と指令位置の間に誤差はなく、増幅されるCT出力はありません。
サーボモーター 、2相モーターは回転を停止します。ただし、CTで検出されたエラーは、エラーが最小化されるまでモーターを駆動するアンプを駆動します。これは、TXによって指令された角度に一致するようにアンテナ結合CTを駆動したサーボシステムに対応します。
サーボモーターは減速ギアトレインを駆動し、TXおよびCTシンクロと比較して大きくなる可能性があります。ただし、ACサーボモーターの効率が悪いため、負荷が小さくなります。また、定速デバイスであるため、制御が困難です。
ただし、一方の相の電圧をもう一方の相の線間電圧で変化させることにより、ある程度制御することができます。重い負荷は、大きなDCサーボモーターによってより効率的に駆動されます。
空中アプリケーションは、400Hzコンポーネント(TX、CT、およびサーボモーター)を使用します。 AC磁気コンポーネントのサイズと重量は、周波数に反比例します。したがって、操縦翼面の移動などの航空機用途に400 Hzのコンポーネントを使用すると、サイズと重量を節約できます。
リゾルバー
リゾルバ (下の図)90 °に配置された2つの固定子巻線があります 互いに、そして交流によって駆動される単一の回転子巻線。レゾルバは、極から直交への変換に使用されます。回転子シャフトに角度を入力すると、固定子巻線に長方形の座標sinθとcosθの比例電圧が生成されます。
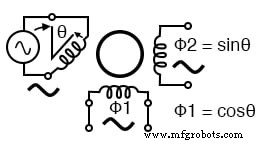
レゾルバはシャフトの角度を角度の正弦と余弦に変換します
たとえば、レーダー内のブラックボックスは、ターゲットまでの距離を正弦波比例電圧Vとしてエンコードし、方位角をシャフト角度としてエンコードします。 X座標とY座標に変換します。正弦波はレゾルバのローターに供給されます。ベアリングアングルシャフトはレゾルバシャフトに結合されています。座標(X、Y)は、レゾルバの固定子コイルで利用できます:
X =V(cos(∠bearing))Y =V(sin(∠bearing))
デカルト座標(X、Y)は、マップディスプレイにプロットできます。 TX(トルクトランスミッター)は、レゾルバとしてのサービスに適合させることができます。

Scott-Tは3-φを2-φに変換し、TXがリゾルバー機能を実行できるようにします
Scott-T を使用することにより、シンクロ送信機からレゾルバのような直交角度成分を導出することができます。 変成器。 3つのTX出力、3相は、 Scott-T によって処理されます。 直交コンポーネントのペアへのトランス。インダクトシンとして知られているリゾルバの線形バージョンもあります。 inductosyn のロータリーバージョン リゾルバーよりも細かい解像度があります。
概要:Selsyn(シンクロ)モーター
- シンクロ 、 selsyn とも呼ばれます は、シャフトトルクを伝達するために使用される回転変圧器です。
- TX、トルクトランスミッター 、三相電気出力で伝達するために、シャフトでトルク入力を受け入れます。
- RX、トルクレシーバー は、シャフトでトルク出力に変換するための角度入力の3相電気表現を受け入れます。したがって、TXは入力シャフトからリモートRX出力シャフトにトルクを伝達します。
- TDX、トルクディファレンシャルトランスミッター 、電気角度入力とシャフト角度入力を合計して、電気角度出力を生成します
- TDR、トルクディファレンシャルレシーバー、 2つの電気角度入力を合計してシャフト角度出力を生成します
- CT、制御変圧器 、ローターがステーター角度入力に対して直角に配置されている場合、ヌルを検出します。 CTは通常、サーボフィードバックシステムのコンポーネントです。
- リゾルバー 三相出力の代わりに、シャフト角度入力の直交sin(θ)およびcos(θ)表現を出力します。
- TXの三相出力は、 Scott-Tトランスフォーマーによってリゾルバースタイルの出力に変換されます。 。
産業技術