


インダストリー4.0における産業自動化を理解する
リショアリングにより、アメリカの製造業の未来が明るくなっていることに興奮していますか?それも素晴らしいと思いますが、何か違うことに気づきましたか?製造が変更されました。インダストリー4.0、ロボット、協働ロボット、モノのインターネット(IoT)の話など、新しいテクノロジーや専門用語があります。
米国はオフショアリングによって傍観されていましたが、他の国々は最大の効率を実現するために自動化テクノロジーを進歩させていました。アメリカの製造業者は、成長を続け、再支給の機会を加速するために、追いつく必要があります。
グローバルな競争力を獲得し、より効率的な自動化装置またはシステムに移行したい場合は、少なくとも現在の産業用自動化の基本的な理解が必要です。オプション、用語、およびコンポーネントを理解すると、チームメンバーや自動化ソリューションのスペシャリストとより詳細に話し合うことができる初期計画と予算を簡単に作成できます。
スピードを上げるために、接続の時代における産業ファクトリー自動化の基本的な概要を以下に示します。
目次
産業用自動化とは何ですか?
産業用自動化の種類
産業用自動化はどのように達成されますか?
製造および産業用自動化システム
アメリカのメーカーが自動化する必要がある理由
インダストリー4.0での自動化
産業用自動化ソリューションに到達
産業用自動化とは何ですか?
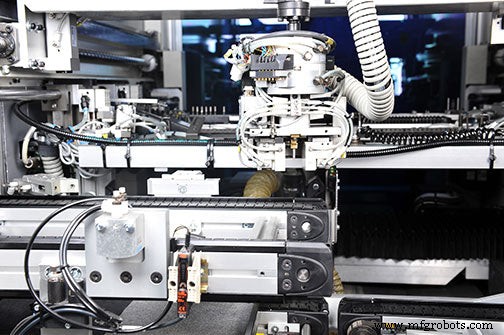
製造効率を求めているのはあなただけではありません。最初の産業革命の前から、業界のリーダーたちは、手工具を使って人間よりも速く、より正確に生産できる特殊な機械を作成してきました。歴史的に最小限の人間の介入で独立して動作するように設計された今日の産業用自動化システムは、産業用制御システムとネットワーク接続の支援と通信し、同期して動作することができます。
製品またはコンポーネントが機械加工、製造、パッケージ化、および/または組み立てられる産業用自動化装置の例があります。自動化の原則と標準により、自動化された機械は、コンポーネントをあるステージから次のステージに最も効率的に移動するシステム構成に配置されることが期待できます。
産業用自動化の種類
メーカーは、忍耐力や正確さを必要とする仕事、または退屈で反復的な仕事、および/または創造性や専門的な才能をほとんど必要としない仕事を自動化しています。米国では、ロボットのコストの低下と人件費の増加により自動化が促進されています。ロボットの価格は今後5年間で65%以上下落すると予想されており、自動化は着実に上昇すると予測されています。まだ行っていない場合は、データ通信インフラストラクチャへの投資が最大の課題の1つになる可能性があります。トレンドのファクトリーオートメーションは、スケジュールどおりにタスクを通信して実行するマシンネットワークの機能に依存しています。
ファクトリオートメーションの一般的なタイプは何ですか?
- シンプルなツール
- アセンブリ
- 検査
- マテリアルハンドリング
産業用自動化はどのように達成されますか?
産業用制御システムは、自動化された機械の独立性と動作の背後にあるメカニズム(または頭脳)です。これは、産業プロセスの自動化を可能にするテクノロジーです。制御システムの主要な構成は、制御ループです。制御システムの例は、非常に単純なディスクリートコントローラーから、ビジネスの製造プロセスと地理的な場所のすべてのレベルを管理する複雑なSCADAシステムにまで及びます。
産業用制御システムの種類:
- SCADAシステム-プラントプロセスを制御および監視するコンピュータシステム
- 比例-積分-微分コントローラー(PID)–設定値と測定値に基づいてシステムを制御します
- プログラマブルロジックコントローラー(PLC)–ロジックを使用して工場出荷時にモーターやその他の機械を制御するために使用される単一のマイクロプロセッサーを備えた、簡単にプログラムできる頑丈な産業用コンピューター
- プログラマブル自動化コントローラー(PAC)– PLCに似ていますが、マルチプロセッサーを含み、マルチタスクが可能です
- 分散制御システム(DCS)–多くのI/Oポイントを含む高度な機能を備えたマルチプロセッサを介してシステム内の多くのノードを制御します
- ヒューマンマシンインターフェイス(HMI)–マシンと対話し、マシンプロセスのステータスをすばやく表示できます
- ディスクリートコントローラー-シンプルなオンとオフの制御。例としては、タイマー、カウンター、サーモスタットがあります。
|
PLC |
HMI | カウンター |



産業用自動化の仕組み:
ステージ1-産業用制御システム(上記のリスト)は、ドライブコントローラーと連携して機能します。
一般的なドライブコントローラは次のとおりです。- 可変周波数ドライブ–周波数と電圧を使用して電気モーターの速度とトルクを制御するACモーターコントローラー
- ステッピングドライブ–パルスおよびフェーズで供給される電流でステッピングモーターを制御するドライバー回路
- アナログサーボ–このデバイスは、オンおよびオフの電圧信号またはパルスを介してサーボモーターの速度を制御します
- デジタルサーボ–アナログサーボと同様ですが、1秒あたりのパルス数を大幅に増やすことができます。
| |

ステージ2-ドライブコントローラは、モーションを与えるアクチュエータを指示します 。
一般的なアクチュエータタイプは次のとおりです。
- 油圧アクチュエータ–流体圧力により、ピストンがチューブ内を移動してトルクが発生します
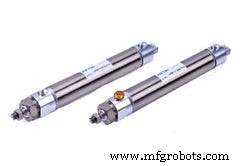
- 空気圧アクチュエータ–空気圧またはガス圧を使用して速度とトルクを制御します
- 電動アクチュエータ(AC、DC、リニア、サーボ、ステッパー)–モーターを動力源とし、電気エネルギーは機械的トルクに変換されます
- 機械式アクチュエータ–単純なメカニズムを使用して、回転運動を使用して線形運動を作成します。
|
空気圧アクチュエータ |
産業用自動化の継続的なプロセス:
- フィードバックセンサー(エンコーダーまたはリゾルバー)は、負荷からデータを収集し、それをコントローラーに送り返します。
- フィールドバスとイーサネット接続は、基本的なフィールドデバイス間の情報交換をサポートし、企業レベルまで送信できます。
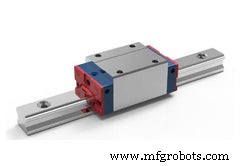
- 自動制御と連動するのは、ベアリング、ギアボックス、ネジ、ホイール、車軸、カム、リンケージなどの機械装置です。
|
フィールドバスシステム |
リニアベアリングとレール |

-
電気機械および機械装置に加えて、流体動力機械装置も産業機械で利用されています。電気機械的方法が実用的な解決策を提供できない場合、流体力が導入されます。流体動力は通常、電子機器によって駆動され、センサーとバルブによって制御されます。
Fluid Power Technologies
産業技術