


PIDコントローラーとは何ですか?その種類、動作およびアプリケーション
PIDコントローラー–それらは何であり、どのように機能しますか?
PIDコントローラー は、産業用自動化およびアプリケーションで使用される最も一般的な制御アルゴリズムであり、産業用コントローラーの95%以上がPIDタイプです。 PIDコントローラーは、さまざまなパラメーターをより正確かつ正確に制御するために使用されます。
ほとんどの場合、これらは温度、圧力、速度、流量、およびその他のプロセス変数の調整に使用されます。堅牢なパフォーマンスと機能のシンプルさにより、これらは、より正確な制御が最重要要件である巨大な産業用アプリケーションに受け入れられています。 PIDコントローラーの仕組みを見てみましょう ?
- 関連記事:分散制御システム(DCS)とは何ですか?

PIDコントローラーとは何ですか?
比例、積分、微分アクションの組み合わせは、より一般的にPIDアクションと呼ばれるため、 PIDという名前が付けられています。 (Proportional-Integral-Derivative) コントローラー 。これらの3つの基本係数は、最適な応答を得るために、特定のアプリケーションの各PIDコントローラーで変化します。
実際のプロセス変数と呼ばれるセンサーから入力パラメーターを取得します。また、セット変数と呼ばれる目的のアクチュエータ出力を受け入れ、比例、積分、微分応答を計算して組み合わせて、アクチュエータの出力を計算します。
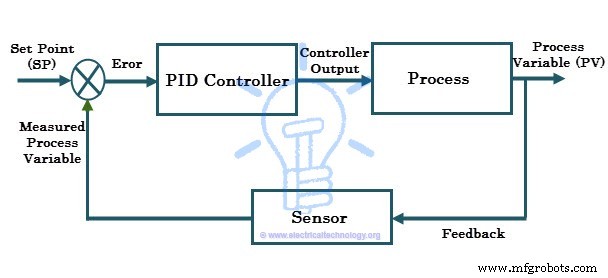
プロセスのプロセス変数を特定のレベルに維持する必要がある、上の図に示す典型的な制御システムを検討してください。プロセス変数が温度(摂氏)であると仮定します。プロセス変数(つまり、温度)を測定するために、センサーが使用されます(RTDとしましょう)。
設定値は、プロセスの望ましい応答です。プロセスを摂氏80度に維持する必要があり、設定値が摂氏80度であるとします。センサーから測定された温度が摂氏50度(これはプロセス変数にすぎません)であるが、温度設定値は摂氏80度であると想定します。
PID制御アルゴリズムの目的の値からの実際の値のこの偏差により、比例積分の組み合わせに応じて、アクチュエーター(ここではヒーター)への出力が生成されます。および微分応答。そのため、PIDコントローラーは、プロセス変数が設定値に落ち着くまで、アクチュエーターへの出力を継続的に変化させます。 これは、閉ループフィードバック制御システムとも呼ばれます 。
関連記事:
- ACドライブとは何ですか?電気駆動装置とVFDの動作と種類
- DCドライブとは何ですか? DCドライブの操作と分類
PIDコントローラーの動作
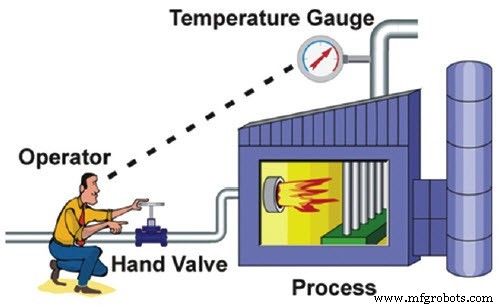
手動制御では、オペレーターは定期的にプロセス変数(温度、流量、速度などの制御が必要)を読み取り、制御変数(制御変数を加熱要素、フローバルブ、モーター入力などの所定の制限に設定するために操作する必要があります。一方、自動制御では、測定と調整が継続的に自動的に行われます。
最新の産業用コントローラーはすべて自動タイプ(または閉ループコントローラー)であり、通常、制御アクションの1つまたは組み合わせを生成するように作成されています。これらの制御アクションには、
が含まれます。- ON-OFFコントローラー
- プロポーショナルコントローラー
- 比例-統合コントローラー
- 比例微分コントローラー
- Proportional-Integral-Derivative Controller
ON-OFFコントローラーの場合、操作変数を制御するために2つの状態が可能です。つまり、完全にオン(プロセス変数が設定値を下回っている場合)または完全にオフ(完全にオフ)です。プロセス変数が設定値を超えている場合)。したがって、出力は本質的に振動するものになります。正確な制御を実現するために、ほとんどの業界ではPIDコントローラー(またはPIまたはPD )を使用しています。 アプリケーションによって異なります)。これらの制御アクションを見てみましょう。
P-Controller
プロポーショナルコントロール または単にPコントローラー 現在の誤差に比例した制御出力を生成します。ここでの誤差は、設定値とプロセス変数の差です(つまり、e =SP –PV)。このエラー値に比例ゲイン(Kc)を掛けたものが出力応答を決定します。つまり、比例ゲインがエラー値に対する比例出力応答の比率を決定します。
たとえば、エラーの大きさが20、Kcが4の場合、比例応答は80になります。エラー値がゼロの場合、コントローラーの出力または応答はゼロになります。比例ゲインKcの値を大きくすると、応答(過渡応答)の速度が速くなります。ただし、Kcが通常の範囲を超えて増加すると、プロセス変数がより高い速度で振動し始め、システムが不安定になります。 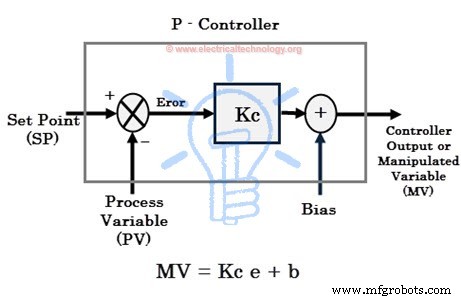
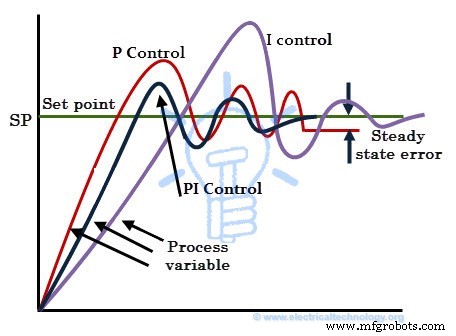
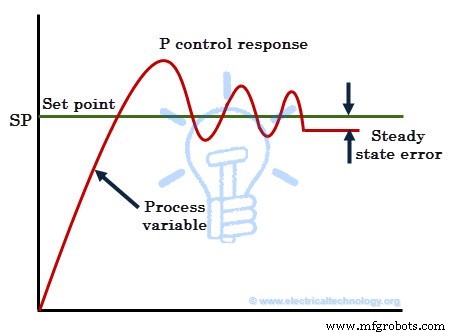 Pコントローラーはプロセス変数の安定性を提供し、応答速度は良好ですが、常にエラーが発生します。セットポイントと実際のプロセス変数。ほとんどの場合、このコントローラーには、単独で使用した場合のエラーを減らすために、手動リセットまたはバイアスが用意されています。ただし、このコントローラーではエラー状態をゼロにすることはできません。したがって、図に示すように、p-controllerの応答には常に定常状態のエラーがあります。
Pコントローラーはプロセス変数の安定性を提供し、応答速度は良好ですが、常にエラーが発生します。セットポイントと実際のプロセス変数。ほとんどの場合、このコントローラーには、単独で使用した場合のエラーを減らすために、手動リセットまたはバイアスが用意されています。ただし、このコントローラーではエラー状態をゼロにすることはできません。したがって、図に示すように、p-controllerの応答には常に定常状態のエラーがあります。
関連記事:
- 産業用自動化とは|産業用自動化の種類
- スマートホームオートメーションシステム–回路とソースコード
I-Controller
- 統合コントローラー またはI-controller 主にシステムの定常状態エラーを減らすために使用されます。積分コンポーネントは、エラーがゼロになるまでの期間にわたってエラー項を統合します。これにより、小さな誤差値でも高い積分応答が得られます。ゼロエラー状態では、定常状態エラーをゼロに維持するために、最終制御装置への出力を最後の値に保持しますが、Pコントローラーの場合、エラーがゼロのときに出力はゼロになります。
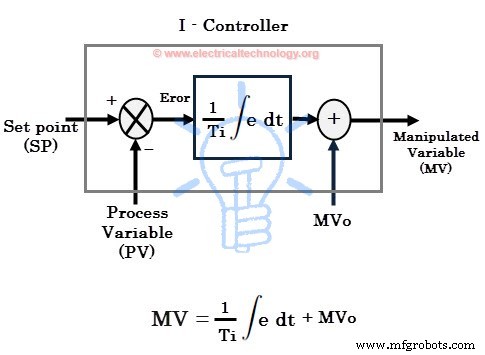
エラーが負の場合、積分応答または出力は減少します。 Iコントローラーのみを使用した場合、応答速度は遅くなります(つまり、応答が遅くなります)が、定常状態の応答は向上します。積分ゲインKiを下げることにより、応答の速度が上がります。
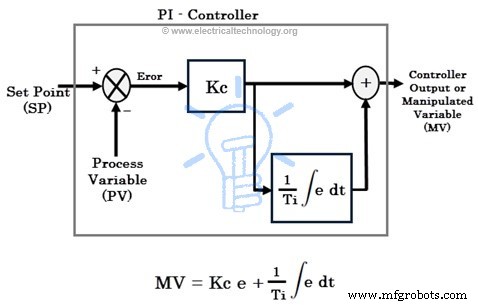
多くのアプリケーションでは、比例制御と積分制御を組み合わせて、良好な応答速度(Pコントローラーの場合)とより優れた定常状態応答(Iコントローラーの場合)を実現します。ほとんどの場合、PIコントローラー 過渡応答と定常応答を改善するために、産業用操作で使用されます。 I-controlのみ、p-controlおよびPI-controlのみの応答を下の図に示します 。
D-コントローラーの応答
派生コントローラー( または単にD-Controller) 単位時間あたりのプロセス変数の変化の速さを確認し、変化率に比例した出力を生成します。微分出力は、誤差の変化率に微分定数を掛けたものに等しくなります。 Dコントローラーは、プロセッサー変数が高速で変化し始めるときに使用されます。
このような場合、Dコントローラーは、プロセス変数の急激な変化に対抗する方向に最終制御装置(制御バルブやモーターなど)を移動します。 Dコントローラのみを制御アプリケーションに使用することはできないことに注意してください。 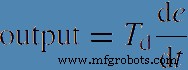
派生アクションは、出力のキックスタートを提供するため、応答の速度を上げ、エラーの将来の動作を予測します。微分項が大きい場合(微分定数または時間Tdを大きくすることで達成されます)、Dコントローラーはプロセス変数の変化に迅速に応答します。
ほとんどのPIDコントローラーでは、D制御応答はエラーではなくプロセス変数のみに依存します。これにより、オペレーターが突然設定値を変更した場合の出力のスパイク(または出力の突然の増加)を回避できます。また、ほとんどの制御システムは、微分応答がプロセス変数のノイズに非常に敏感であり、少量のノイズでも非常に高い出力を生成するため、微分時間tdの使用量が少なくなります。 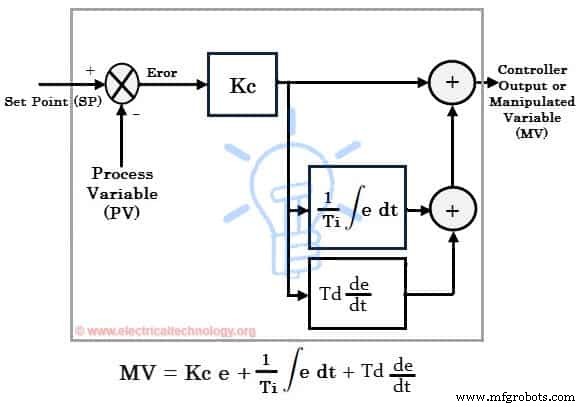
したがって、比例、積分、および微分の制御応答を組み合わせることにより、PIDコントローラーが形成されます。 PIDコントローラーはユニバーサルアプリケーションを見つけます。ただし、PID設定を把握し、適切に調整して目的の出力を生成する必要があります。調整とは、比例、積分、および微分パラメーターの最適なゲインを設定することにより、PIDコントローラーから理想的な応答を取得するプロセスを意味します。 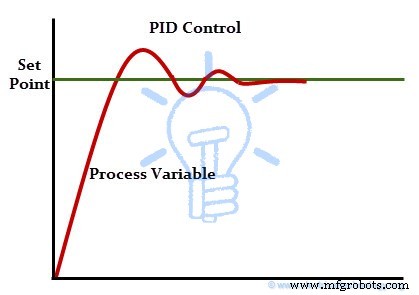
希望する応答を得るために、PIDコントローラーを調整するさまざまな方法があります。これらの方法には、試行錯誤、プロセス反応曲線手法、Zeigler-Nichols法などがあります。最も一般的にはZeigler-Nicholsと試行錯誤の方法が使用されます。
これは、PIDコントローラーとその動作についてです。コントローラー構造が単純なため、PIDコントローラーはさまざまなプロセスに適用できます。また、プロセスの詳細な数学的モデルを知らなくても、任意のプロセスに合わせて調整できます。アプリケーションには、PIDコントローラーベースのモーター速度制御、温度制御、圧力制御、流量制御、液面などが含まれます。
リアルタイムPIDコントローラー
今日の市場ではさまざまなタイプのPIDコントローラーが利用可能であり、レベル、流量、温度、圧力などのすべての産業用制御のニーズに使用できます。 PIDを使用してプロセスのこのようなパラメーターを制御することを決定する場合、オプションには、PLCまたはスタンドアロンPIDコントローラーのいずれかを使用することが含まれます。
スタンドアロンPIDコントローラーは、1つまたは2つのループを監視および制御する必要がある場合、または大規模なシステムでアクセスするのが難しい状況で使用されます。これらの専用制御デバイスは、シングルループ制御とデュアルループ制御のさまざまなオプションを提供します。スタンドアロンPIDコントローラーは、複数のセットポイント構成を提供し、独立した複数のアラームも生成します。 
これらのスタンドアロンコントローラーには、Yokogava温度コントローラー、Honeywell PIDコントローラー、OMEGAオートチューンPIDコントローラー、ABB PIDコントローラー、SiemensPIDコントローラーが含まれます。
ほとんどの制御アプリケーション、PLCはPIDコントローラーとして使用されます。 PIDブロックはPLC/PACに組み込まれており、正確な制御のための高度なオプションを提供します。 PLCは、スタンドアロンコントローラよりもインテリジェントで強力であり、作業を容易にします。すべてのPLCは、Siemens、ABB、AB、Delta、Emersion、またはYokogava PLCのいずれであっても、プログラミングソフトウェアのPIDブロックで構成されています。
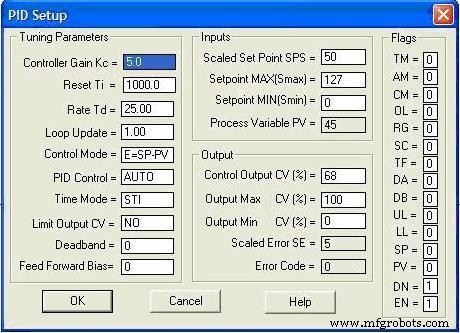
次の図は、アレンブラドリー(AB)PIDブロックを示しています。 とそのセットアップウィンドウ。 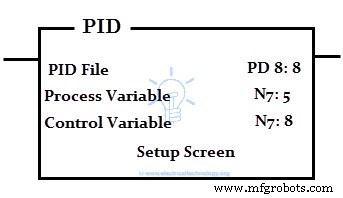
次の図は、SiemensPIDブロックを示しています。 。 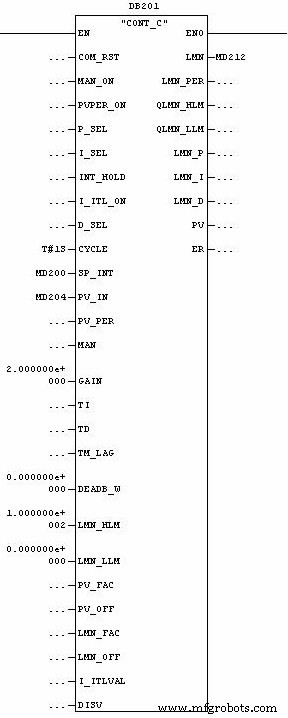
下の図はPIDコントローラーを示しています LabVIEWPIDツールセットによって提供されるVI。 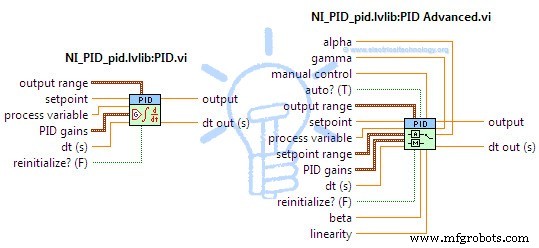
産業技術