


自動運転車について知っておくべきことすべて
少し前までは、車でA地点からB地点まで車で移動する必要がなく、コントロールを奪う必要がないというのはまったく未来的なことのように思えましたが、その日は私たちが思っているよりも近いです。
今日のブログでは、自動運転車とは何か、自動運転車を作るテクノロジー、自律性のレベルに応じた分類、およびこれらのテクノロジーを組み込んだ現在のモデルについて説明します。はじめましょう?むしろ「KITTを開始」。
自動運転車とは何ですか?
自動運転車とは、一連のセンサーとコンピューターロジックを備えており、周囲の世界を解釈して、人間が介入なしで、または部分的な支援を受けた場合と同じように運転できる車です。
これらのセンサーを使用すると、他の車両の位置、位置、距離、および走行中の車線に関する情報を取得できます。これは、GPS情報と十分に正確な地図とともに、車の状況と周囲の要素を常に示します。場合によっては、気象条件への適応も可能になります。
自動車の自律性を可能にする技術
自動運転車の開発には、さまざまな技術が使用されています。最もよく使われるものを説明します:
たとえば、テスラが使用する車両の周囲にあるカメラを介したナビゲーション 。この自動運転システムは、8台のカメラ、12台のサポート超音波センサーおよび前方レーダーの組み合わせに基づいています。全体として、車は環境を「見て」、人と同じように解釈することができますが、反射率は優れています。
Google、Ford、Toyota / Lexus、Nissan、Volkswagenなどの企業が使用しているもう1つのシステムはLIDARです。 LIDARは回転レーザービームエミッターです 、通常は車両の屋根に配置され、車両の周囲360度の環境を再構築する役割を果たします。この光線の放出とその反射により、到達範囲内の障害物のデジタルマップを作成でき、前のケース(超音波、レーダー)などのサポートセンサーと一緒に、干渉して順番に動作します。
言及された主要なシステム(カメラ、LIDAR)とは別に、キャプチャされた情報を改善するために使用される支援技術、環境の完全な評価を提供する他のタイプの信号も使用されます。
これらのテクノロジーは超音波センサーです 短距離で使用されますが、コストが低いため、車両のナビゲーションだけでなく、駐車場の安全性のために境界センサーを搭載できます。
もう1つの普及しているシステムは、レーダーです。 、LIDARとは異なり、電波を放射して物体に当たって跳ね返り、悪天候下でより効果的に機能する傾向があります。
自律性のレベルに基づく自動運転車の分類
自動運転車は、自律性のレベル、つまり、ドライバーに対する自動車の独立性の程度に応じて分類されます。
この意味での最初の分類は、2013年に米国運輸省道路交通安全局であるNHTSAによって0から4のスケールで確立されました。
システムが進化するにつれて、事実上すべての場合に使用され、最も普及している現在の方法に到達するまで、新しい分類とそれらを評価する方法が出現しました。 2016年に最後の改訂が行われたSAEJ3016規格について話しています。
この分類では、さまざまな国で出現したものをすべてグループ化して、推奨される評価ガイドを提供しますが、各ブランドはそれぞれの興味に応じて使用できるかどうかを判断します。
このガイドでは、6レベルの自動運転を確立しています 、0から5の範囲。これらのレベルは、車両が各レベルに到達するために必要な最小容量と、自動化する必要のある機能のみを確立します。
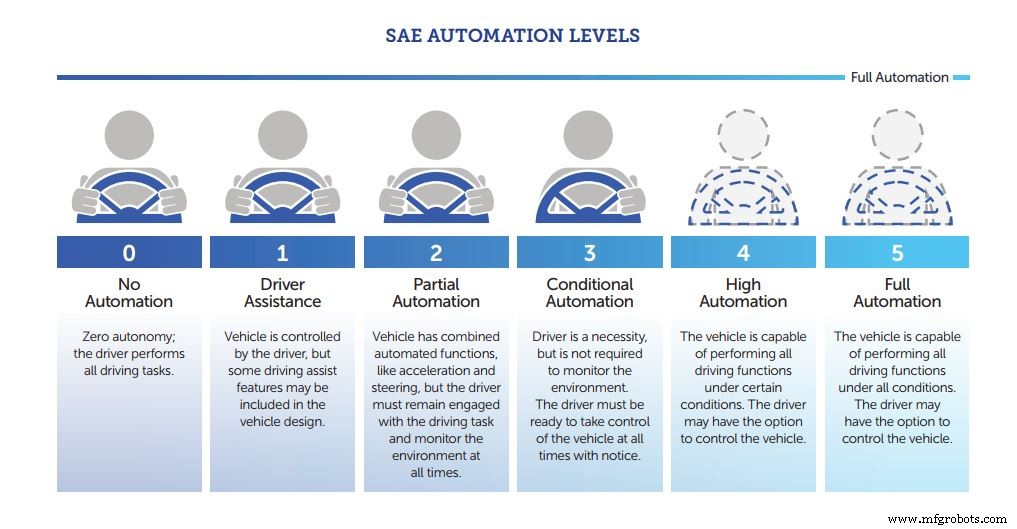
- レベル0。自動化なし。
- ドライバーは、運転のすべての要素と規定に対して100%責任を負います。
- レベル1。基本的な運転支援。
- 車両には、ドライバーを簡単な作業から解放するのに役立つ基本的な要素があります。
- 速度や軌道の維持の自動化も可能ですが、そのうちの1つだけです。
- 他のすべてのタスクは引き続きドライバーの責任です。
- 運転中の障害物、物体、イベントの自動検出システムはありません。
- 支援は理想的な条件でのみ使用できます。
- レベル2。部分的な自動化。
- 速度と弾道の両方のメンテナンスが自動化されています。
- ドライバーは、車両の動きに関連する機能から解放されます。
- 運転中の障害物、物体、イベントの自動検出システムはありません。
- 支援は理想的な条件でのみ使用できます。
- レベル3。運転の条件付き自動化。
- 前の場合と同様に、速度は自律レバーの経路の両方で制御されます。
- 物体や運転状況、障害物を検出するシステムはすでに存在します。
- システムがドライバーの介入を必要とするか、ドライバーの介入を必要とする潜在的に危険な状況がない限り、システムはドライバーの介入なしで動作できます。ドライバーが反応する時間を確保するために、この通知は事前に十分に提供する必要があります。
- 特定の条件下でのみ使用できます。
- レベル4。運転の完全なケース自動化。
- 前の場合と同様に、速度は自律レバーの経路の両方で制御されます。
- 状況や障害物に複雑に反応し、それらに完全に反応するのに十分なセンサーがあります。
- メインが故障したり、制御できない場合に備えて、車両には代替システムがあります。この代替システムでは、すべての運転機能を使用できるわけではありませんが、車両を安全な場所まで運転して停止することはできます。
- システムが正常に動作せず、運転できない場合があります。
- レベル5。完全な自動化。
- 前の場合と同様に、速度は自律レバーの経路の両方で制御されます。
- 予期しない運転や障害物への対応は完全に自動化されています。
- 車両が停止するまで制御できるバックアップシステムがあります。
- システムの使用に制限はなく、人間のようにどのような状態でも使用できます。
- 車内に人がいる必要はありません。
自動運転車の現在のモデル
さまざまな程度の自律性を備えた、ますます多くの自動運転車モデルが市場に出回っています。上記の分類内で、さまざまなレベルの車両のケースを見つけることができます。
レベル0では、市場に出回っているほとんどすべての既存のモデル(経済的および古い) 、支援がない ドライバーからの100%のアクションが必要です。このグループには、緊急ブレーキや車線または速度維持などのアシストを備えたものも含まれます。
これらの車両がアダプティブクルーズコントロール機能を追加した場合 、レベル1について話します。これは、先行車両までの距離を自動的に維持できるためです。 支援を組み込んだものも含まれます 駐車 ホイールの回転にのみ作用する場合の容量。このカテゴリには、市場に多数の車両もあります 。
レベル2では、このカテゴリに含まれるモデルは少なくなります。これらは、高速道路で使用するシステム指向です。 、自動反応を可能にするはるかに精巧な 渋滞で止まる可能性もある交通状況に。
この種のシステムを備えた最も代表的なブランドは、メルセデスベンツ(ドライブパイロット)である可能性があります。 )、日産( ProPilot )、ボルボ(パイロットアシスト )、AudiまたはBMW。最後に、パーキングエイドシステムがスロットルを追加で制御する場合、それらもこのレベルに含まれます。
自動運転のレベル3 、それを組み込んだブランドまたはモデルのケースは個別です。最もよく知られているのは、オートパイロットを備えたテスラです。これにより、道路の交通状況を予測し、高速道路に機能を制限することなく、ドライバーの介入なしに追い越しのために車線を変更することもできます。
レベル4の場合 自律性商用モデルを見つけるのは非常に難しい なぜなら、それらの多くは開発中ですが、まだ商品化されていないからです。最も重要なのは、自律走行を何キロも積み重ねてきたGoogleのことであり、ますます現実に近づいています。
前の場合と同様に、レベル5の車両のプロトタイプのみがあります。 、そして最も進んだのは再びグーグルのものです。ステアリングホイールやペダルのないこのモデルのバリエーションがあり、短いツアーで理想的な条件でテストされています。

自動運転車の将来予測
各ブランドは非常にエーテル的な方法で視野を共有しているため、これらのシステムの進化がどのように進むかを予測することは困難です。明らかなことは、自動運転の実装は、ドライバーが起こりうる出来事に注意を払っていないために事故を避けるために、ドライバーの意識と密接に関連している必要があるということです。
現在、2025年までに、レベル3までの自律性を備えたモデルの大部分がリリースされると予想されます。これは、これらの進歩と連携しなければならない新しい法律の基礎を築くのに役立ちます。
この夏以来、国連はレベル4および5の自動運転車の使用を制限し、歩行者の近くでの運転を禁止する規則に署名しました。このドキュメントによると、現時点では、これらのシステム(レベル4および5)は、歩行者、自転車、または同様の交通が許可されていない道路でのみアクティブ化できます。
また、移動方向の間には物理的な分離が必要であり、速度は60km/hに制限されています。最後に、すべての乗客が正しく着席し、シートベルトを着用していることが必須です。
いずれかのプロジェクトにAGVを実装しますか? お問い合わせください!
産業技術