


初心者のためのサーボモーターチュートリアル– Electronicslovers.com
サーボモーターはROBOTICSだけでなく産業でも広く使用されており、サーボはロボットアーム、RCカー、レーダーディッシュ、コンベヤーベルト、アンテナポジショニング、カメラオートフォーカス、印刷プロセスなど、今日のROBOTICSプロジェクトの中心です。
多くの趣味のプロジェクトでは、サーボモーターが広く使用されています。この記事で、実際のサーボとは何か、サーボモーターの基本的な動作原理、さまざまな種類のサーボ、サーボモーターと通常のDCモーターの基本的な比較について簡単に説明していただければ幸いです。

サーボモーターの定義:
「 これは、コマンドに応答してモーションを提供するデバイスです。負のフィードバックに応答してモーションを調整します。 「
サーボの主な特徴は、シャフトの位置を正確に制御することです。これは基本的に閉ループシステム(つまり、負のフィードバック)です。
サーボの閉ループシステムには4つの主要部分があります:
- DCモーター。
- 制御回路。
- ギア。
- 位置フィードバックセンサー。
サーボモーターの主要部分は小型DCモーターです。これらのDCモーターは、高速(つまり、高RPM)で、非常に低いトルク(つまり、仕事をするためのねじり力)です。基本的に、小さなDCモーターは非常に高速ですが、それほど高いトルクはありません(つまり、小さな力と大きな距離)。しかし、サーボ内のギアの設計は、DCモーターのこの高速で低トルクを、より低速でより高いトルク(つまり、距離が短く、力が大きい)に変換します。
多くのDCモーターは5000RPM前後で高速ですが、ギアはこの非常に高いRPMを約60RPMと高トルクに低減します。安価なサーボは、軽量で低コストを維持するためにプラスチック製のギアを備えていますが、より重い作業(つまり、非常に高いトルク)用に設計されたサーボは、産業で使用されるサーボなどの金属製のギアを備えています。 。
入力ラインを介して最初にサーボに電力が供給されると、DCモーターは非常に高いRPMと非常に小さなトルクで回転しますが、ギアが原因でサーボのシャフトが遅くなります。
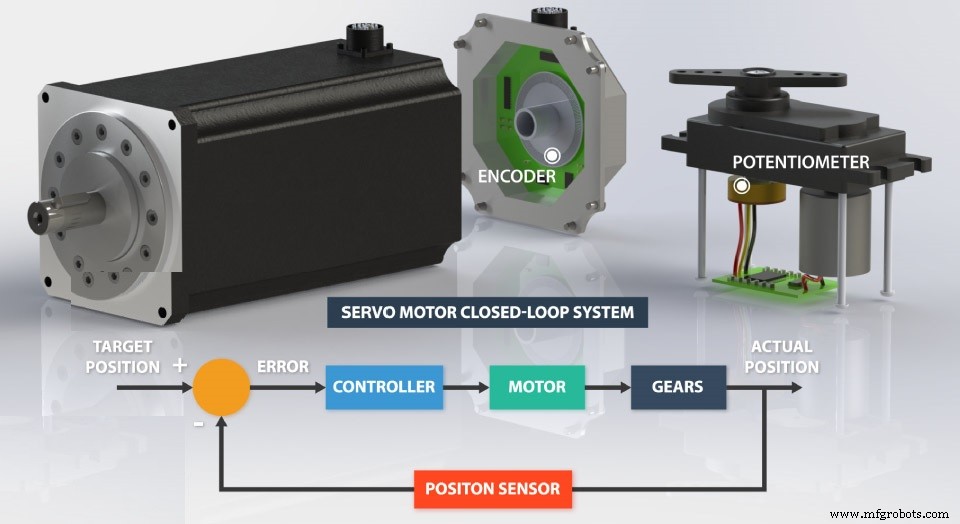 位置フィードバックセンサーは負帰還構成で接続されているため、サーボの位置を正確に制御するために希望の位置。産業用サーボの位置フィードバックセンサーは高精度エンコーダーですが、趣味では、サーボの位置センサーはポテンショメーターです。ファイナルギアの位置センサー(ポテンショメーター)は、エラー検出器を含む回路に接続されています(つまり、このエラー検出器は基本的に、ターゲット位置とも呼ばれる入力ラインからの信号と出力からの信号を比較するコンパレータです。実際の位置とも呼ばれるポテンショメータとボードに埋め込まれたコントローラICを介して。
位置フィードバックセンサーは負帰還構成で接続されているため、サーボの位置を正確に制御するために希望の位置。産業用サーボの位置フィードバックセンサーは高精度エンコーダーですが、趣味では、サーボの位置センサーはポテンショメーターです。ファイナルギアの位置センサー(ポテンショメーター)は、エラー検出器を含む回路に接続されています(つまり、このエラー検出器は基本的に、ターゲット位置とも呼ばれる入力ラインからの信号と出力からの信号を比較するコンパレータです。実際の位置とも呼ばれるポテンショメータとボードに埋め込まれたコントローラICを介して。
歯車の回転により、ポテンショメータのノブが回転し、その結果、エラー検出器に接続された電圧が生成されます。ここで、コントローラーICに接続されているコンパレーターによる2つの信号の比較によって生成されたエラー(つまり、このコントローラーはチップに統合されたHブリッジです)。比較後、目標位置を達成するためにシャフトのいずれかの方向への回転を決定するコントローラーを有効にするエラーが生成されます。 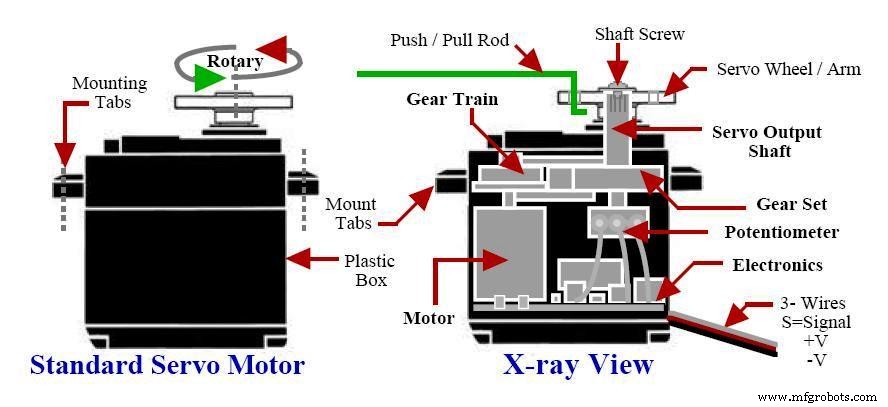
サーボの種類:
サーボにはさまざまな種類があります。
- 位置回転サーボ:
出力軸は180度しか回転しません。シャフトがその範囲外でさらに回転するのを制限するために、追加のストップが配置されています(例:ロボットアーム、ラダーなど)
- 連続回転サーボ:
定位置回転サーボに似ていますが、360度連続回転できます。サーボに送信されたコマンドにより、サーボは時計回りまたは反時計回りのいずれかの方向にさまざまな速度で回転します(例:レーダーディッシュなど)。
- リニアサーボ:
このサーボの動きは、円形ではなく前後方向です(例:CNCマシン、3Dプリンターなど)。
サーボモーターとDCモーターの基本的な比較:
サーボモーターは前後に180度回転できますが、DCモーターは、電力が供給されている限り360度回転できます。最近のサーボは、360度回転できる連続回転でも利用できますが、ギアの設計により、サーボの速度はDCモーターに比べて遅くなります。 DCモーターはフリーランニングロボットに最適ですが、精度が必要な場合(ROBOTIC ARM、ワイパーボートラダーなど)はサーボが最適です。
DCモーターの速度は、PWM(パルス幅変調)技術によって制御されます(つまり、デューティサイクルを変更することにより、DCモーターの速度を制御できます)。例:デューティサイクルが50%を超えると速度が速くなり、デューティサイクルが50%未満の場合は速度が遅くなります。
一方、サーボモーターのPWM技術は、速度ではなくシャフトの位置を決定します。コマンドがサーボに送信されると、シャフトの位置が正確に目的の位置に設定されます。したがって、シャフトのこの自動調整可能な動作により、サーボはロボット工学アプリケーションに最適です。
産業技術