


MIA-1オープンソースの高度な手作りヒューマノイドロボット!
コンポーネントと消耗品
>  |
| × | 1 | |||
| × | 8 | ||||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
みなさん、こんにちは。今日は、高度でユニークなだけでなく、オープンソースで3D印刷なしで作成できる、ロボットMIA-1の作成方法を紹介します。はい、わかりました。このロボットは完全に手作りです。そしてオープンソース つまり、コードとすべての詳細を無料で入手します。 、必要に応じて、あなたもこのロボットを作ることができます。
ここでは彼女のスピーチだけが表示されていますが、彼女にできることは他にもたくさんあります!
彼女ができることは次のとおりです。
- 聞いて話をすることができます
- 彼女の左目のカメラを使用してあなたを見て認識できます
- 動きを検出して写真を撮ることができます
- 彼女に命令するためのタッチスクリーンLCD付きのGUIがあります
- 彼女の液晶ディスプレイに画像を表示します
- 彼女の画面に画像や番組をダウンロードする
- 右手にあるレーザーポインターを使用して物事をターゲットにできます
- 話しているときに手を動かす
- 他の人の助けを借りずに彼女の足で立ちます
- 彼女はお辞儀をすることもできます(ビデオを見る)
- その他多数!
備品:
このロボットを作るために、私は地元の店で入手できるすべてのものを使用しました。
マイクロコントローラー+コンピューター(脳):
- Arduino Mega(サーボモーターの制御用)
- フルコンピューター(Raspberry Piを使用できますが、最初はラップトップを彼女の脳として使用していました)
サーボモーター:
MIA-1には13の自由度があります。
- LDX227デュアル軸サーボモーター8x
- MG996r / MG996サーボモーター3x
- figeriveの中古マイクロサーボsg90
ロボットの爪を追加し、別のMG996rサーボモーターを使用していることに注意してください。
ジャンパー線など
ビジョン:
写真の撮影や顔の検出などの画像処理には、 USBカメラを使用しました 。
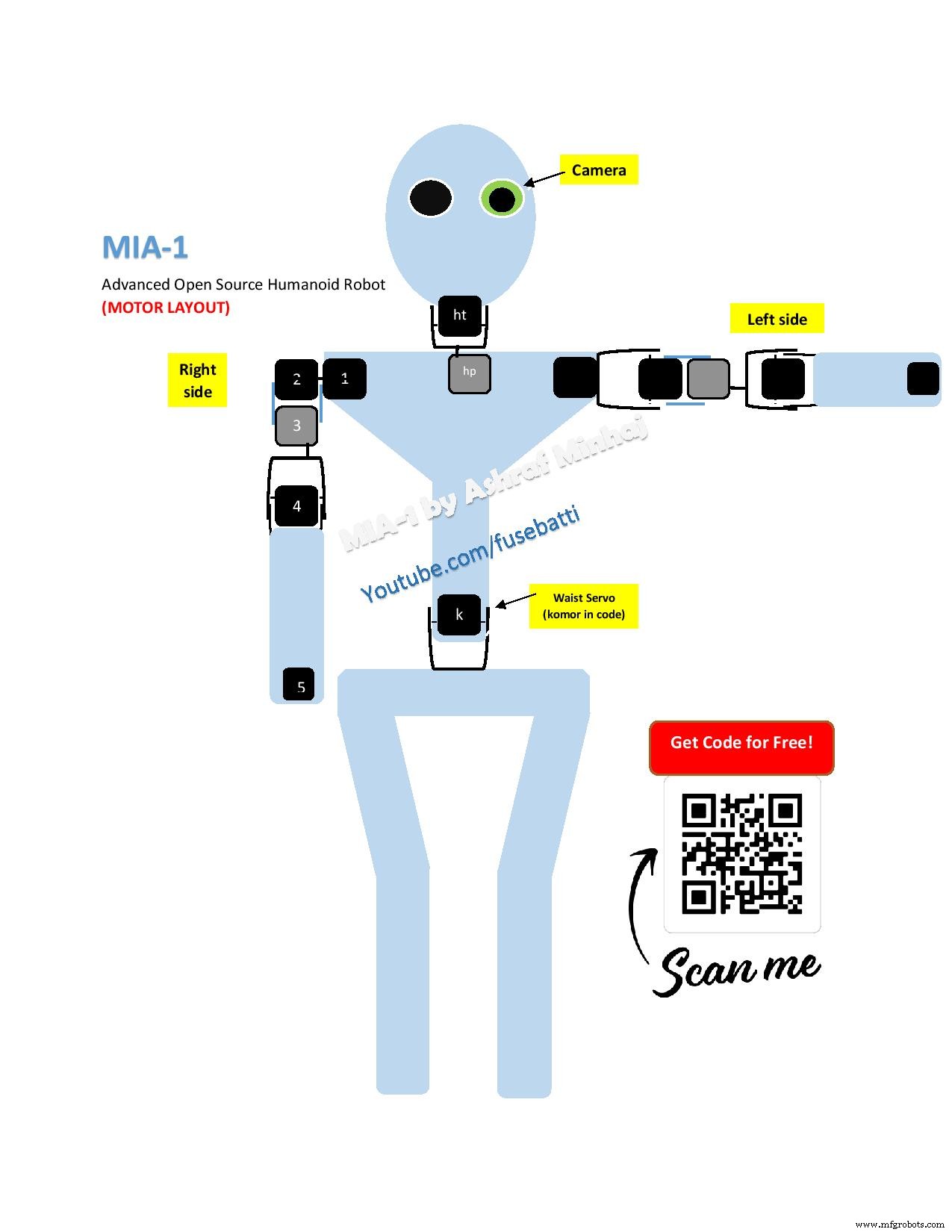
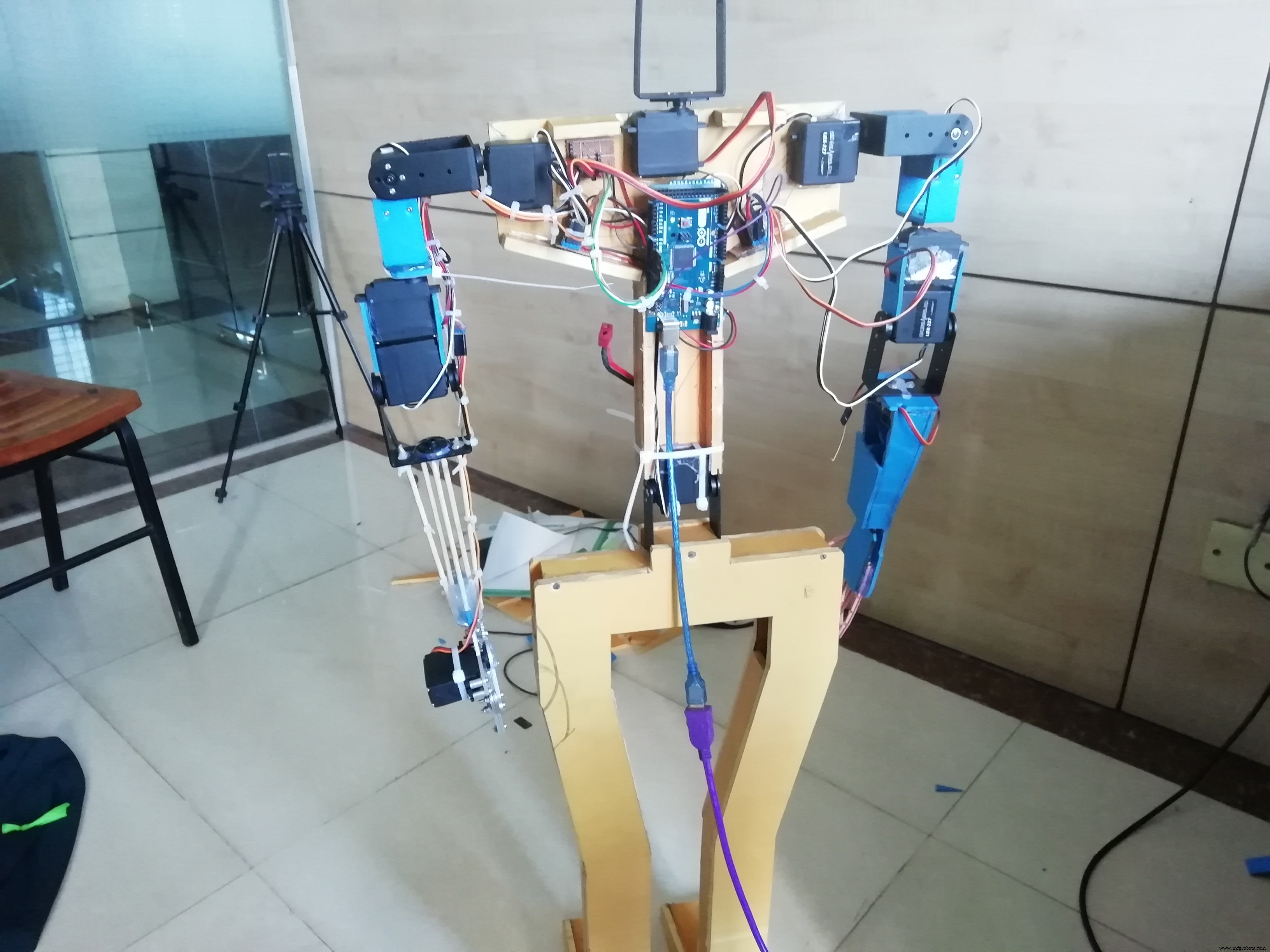
ステップ1:ボディとモーターのレイアウト <図>
 <図>
<図>  <図>
<図>  <図>
<図> 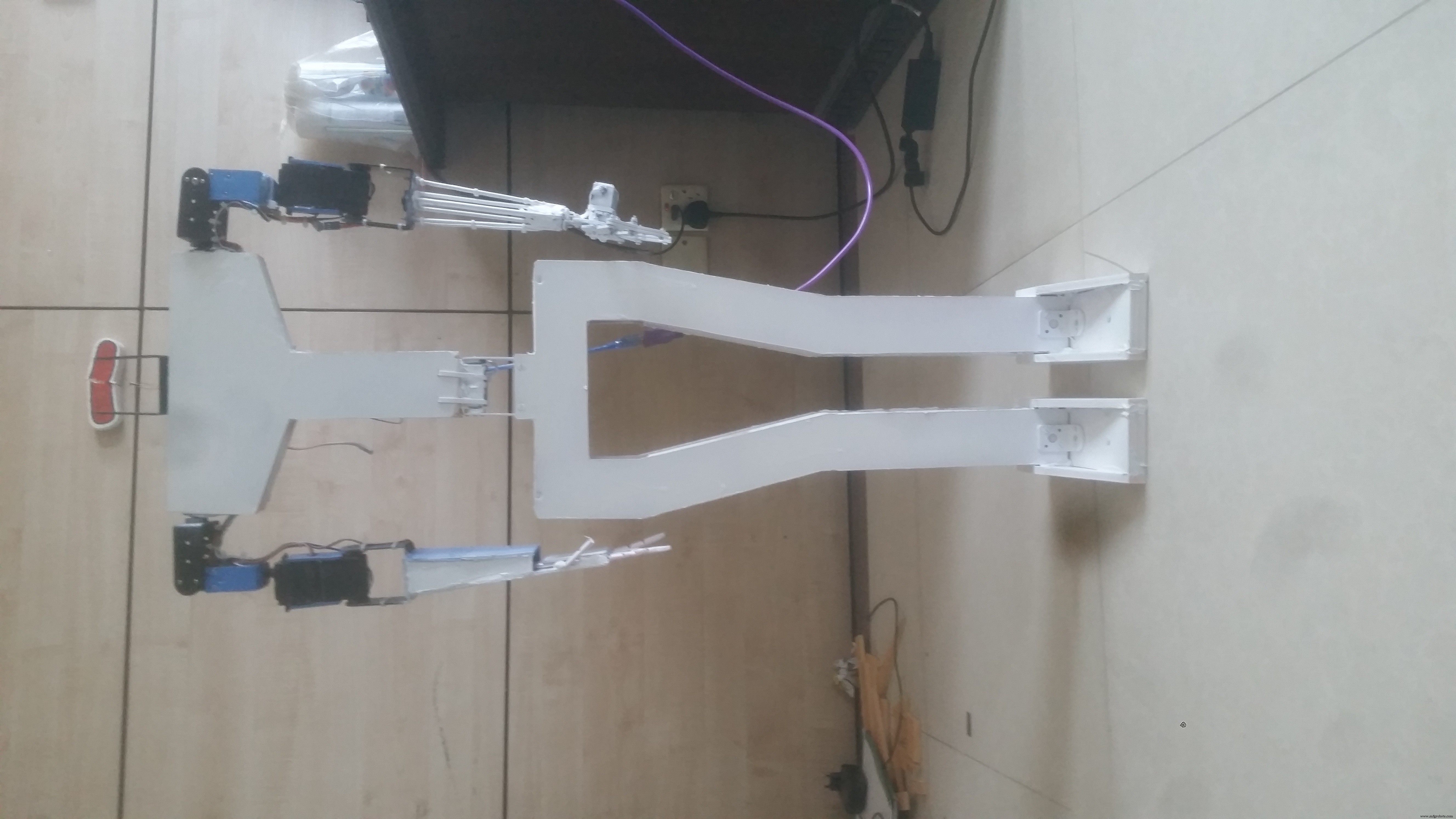
本体は PVCシートを使用して作られています ホットグルーを使用してさまざまな部品を取り付けます およびネジ (写真を参照)。私はカッターナイフを使用してPVCシートをカットしました(非常に注意してください!!代わりに指をカットしないでください!!)。写真1と2から、サーボのレイアウトを見ることができます。女の子のロボットを作っているときに、女性の体型と体型を与えました。
サーボコネクタは、曲がりやすい薄いPVCシートを使用して作られています。
頭は風船を使って作られ、風船に空気を吹き込み(写真を参照)、湿った小さな紙片を加えて乾燥させます。 8層を追加した後、それは強力で持続可能になりました。
次に、スプレーカラーを使用して白(全身)に着色しました。
デザインは驚くほどバランスが取れていて、彼女(MIA-1)は彼女の2フィートのところに立っていることがわかりました!!
ディスプレイの追加:
その後、いくつかのネジとホットグルーを使用して、液晶ディスプレイを胸に取り付けました(最後の写真)。
ステップ2:回路図 <図>
 <図>
<図> 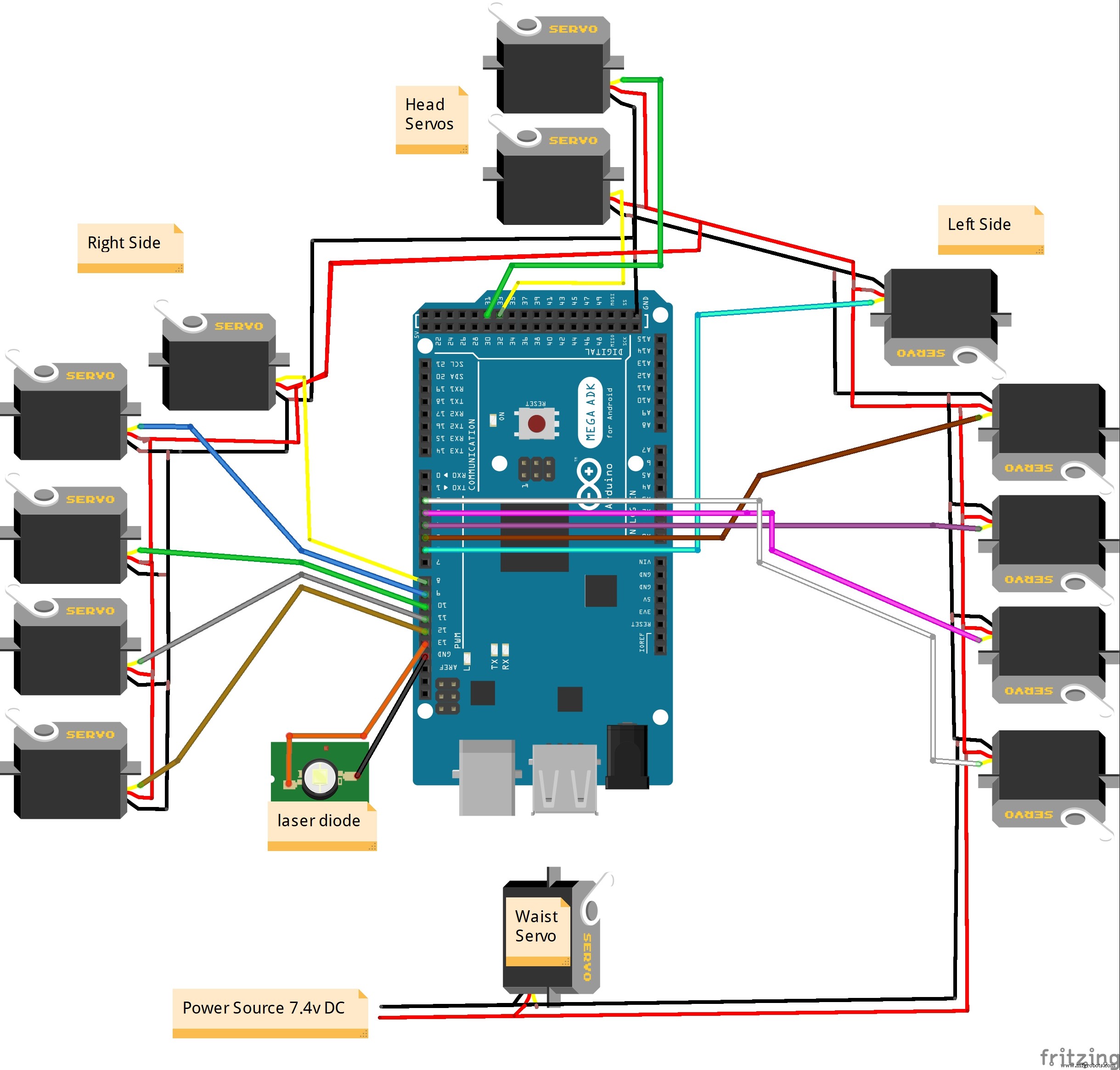
回路図は複雑に見えますが、そうではありません。わかりやすくするために、本体のモーターレイアウトとして回路を描きました。必ず地面を共有してください。 arduinoは、USBケーブルを介してコンピューターから電力を受け取ります。 miaが物事をターゲットにすることを可能にするレーザーダイオードがあり、arduinoのピン13(LEDピン)から電力を受け取ります。
ご覧のとおり、すべてのモーターとarduino自体がボディの裏側にあります。また、すべてのケーブルを後ろから配置しました。コンピュータに接続できるように、延長USBケーブルを購入しました。
ステップ3:コード
ご存知のように、私はarduinoメガを使用しました。 arduinoメガはサーボモーターを制御します。モーターは事前にプログラムされています。ここからモーターコードを取得します。ロボットを構築する間、デフォルトのサーボ位置に注意してください。これを維持します。ボディを作らずにarduinoでモーターに電力を供給するだけで、サーボモーターはデフォルトの位置(以下のデフォルトの位置)に到達します
/ *サーボのデフォルト/スタンバイ位置* /
komor.write(4); #waistサーボ
left1.write(120);
rFinger.write(0);
servo1.write(55);
clawOpen();
rightStandBy();
leftStandBy();
headTilt.write(134);
headPan.write(90); モーター制御コードは750行以上です(編集中は注意してください)。
主な処理はpython3スクリプトを使用して行われます。
Pythonには、シリアル経由でarduinoと通信するpySerialライブラリがあります。 「COMポート」に注意してください。
#シリアル通信を介してmiaモータードライバーボードに接続する
try:
mia =serial.Serial( "COM28"、9600)
ただし、
pass また、これらのライブラリをpipインストールする必要があります
"" "import必要なライブラリ" ""
#importrequests#post / getリクエストを作成する
import pyttsx3 #offline text to Speech
import Speech_recognition as sr #Speech toテキスト(機能するにはインターネットが必要です)
インポート時間
ランダムインポートからrandint#random整数ピッキングライブラリ
import tkinter #tkinterguiライブラリ
from tkinter import Tk、Button、Label、Tk #必要なものをインポート
インポートシリアル#USB経由のシリアル通信用シリアルライブラリ
PILからインポート画像#fro表示画像
import cv2 #ComputerVisionライブラリ
インポートwikipedia#データを取得ウィキペディアから直接 pipinstallを使用するとすべてが簡単です。 opencvの場合 コマンドプロンプトを入力します:
pip install opencv-contrib-python あなたが見ているGUI(グラフィカルユーザーインターフェース)は、tkinterを使用して開発されています。このライブラリおよび他のすべてのライブラリについては、次のコマンドでインストールできます:
pip install library_name その後、インストールされます。
また、Webカメラを使用している場合は、カムが1として示されている可能性が高いことも確認してください
cap =cv2.VideoCapture(1)#camera また、このロボットが実際にどのように応答するかについて詳しく知りたい場合は、このチュートリアルをお読みください。
MIA-1のコードは、これを拡張したものにすぎません。
arduinoに命令する時点で、コンピューターはバイトを送信し、arduinoは受信したバイトに応じてアクションを実行するため、Miaの動きと会話は非同期に見えます。
mia.write(b'p ')#上に移動してから下に移動するコマンド
count_down(3)
response( "Smile please"、100) コードを取得するには、以下のリンクにアクセスしてください。
ここからMIA-1のコードをダウンロードします。
ステップ4:電源と仕上げ
7.4vのリポバッテリーを使用してロボットに電力を供給しました。 LDX227サーボは非常に電力を消費します(ただし、高品質です)ので、常に少なくとも7.3vになるようにしてください。一方、MG996rサーボモーターは安価で破損しやすいので、7.8Vを超えないように注意してください。したがって、このロボットの最大電源は7.4〜7.8ボルトである必要があります。
幸せな作り!このロボットが気に入ったら、もっとすばらしいプロジェクトのチャンネルに登録してサポートしてください。
コード
完全なコードを無料でダウンロード
ashraf-minhaj / MIA-1-Open-Source-Humanoid-Robothttps://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-Robot 回路図
MIA-1回路
https://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-Robot製造プロセス
- オープンソース用語の紹介
- 3Dメタル印刷を変革する高度なサーボモーター
- オープンソースのMicroFactoryであるFirePickDeltaのプロジェクトログ
- 記事:Meet OAP —オープンロボットリファレンスデザインプロジェクト
- Intellisaurus –恐竜ロボットキット
- Open CV Robot
- シンプルなパイロボット
- AT&T、TechMahindraが新しいオープンソースAIプラットフォームでコラボレーション
- ソフトウェアのリスク:IoTでのオープンソースの保護
- オープンソースのIoT開発ツールとベンダーがサポートするツール
- エッジでのオープンソースの必要性(eBook)