


Arduino CNCプロッター(製図機)
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 |
必要なツールとマシン
>  |
| |||
 |
|
アプリとオンラインサービス
>  |
| |||
| ||||
 |
| |||
|
このプロジェクトについて
<図>
<図>
やあみんな!以前の指導可能な「独自のArduinoトレーニングプラットフォームの作り方」をすでに楽しんでいて、新しいものの準備ができていることを願っています。いつものように、この種の超驚くべき低コストの電子プロジェクトを作成しながら、ステップバイステップでガイドするこのチュートリアルを作成しましたこれは、「CNC描画」または単に「ArduinoCNCマシン」としても知られる「CNCプロッタマシン」です。 ^ _ ^
CNCプロッターの作り方を説明するチュートリアルをウェブ上でたくさん見つけましたが、情報が不足しているため、そのようなマシンを作るのは少し難しかったので、ここでこの説明可能なものを始めることにしました。独自の描画機を簡単に作成する方法の詳細 。
このプロジェクトは、JLCPCBに注文したカスタマイズされたPCBを入手した後、特別に作成するのに非常に便利です。
マシンの外観を改善するために、またこのガイドには、マシンを簡単に作成できるようにするための十分なドキュメントとコードがあります。このプロジェクトはたった5日で完了しました。必要な部品をすべて入手し、ハードウェアの作成と組み立てを完了するのに3日、コードを準備して調整を開始するのに2日かかりました。始める前に、まず見てみましょう。
このチュートリアルから学ぶこと:
- プロジェクトの機能に応じて、プロジェクトに適したハードウェアを選択する
- 選択したすべてのコンポーネントを接続するための回路図を準備します
- すべてのプロジェクトパーツを組み立てます(機械的および電子的組み立て)
- マシンバランスのスケーリング
- システムの操作を開始します
ステップ1:プロッタマシンとは何ですか?
初心者向けに指導できるようにしたので、まずは製図機とは何か、その仕組みを詳しく説明する必要があります!
ウィキペディアで定義されているように、CNCはコンピューター数値制御の略で、コンピューターから送信されたシリアルポートを介して命令を受け取り、受け取った命令に応じてアクチュエーターを動かすコンピューター制御構造です。これらのマシンのほとんどは、テーマ軸にステッピングモーターを含むステッピングモーターベースのマシンです。
「軸」に言及する別の言葉、はい、各CNCマシンには、コンピュータプログラムによって制御される定義された数の軸があります。
<図>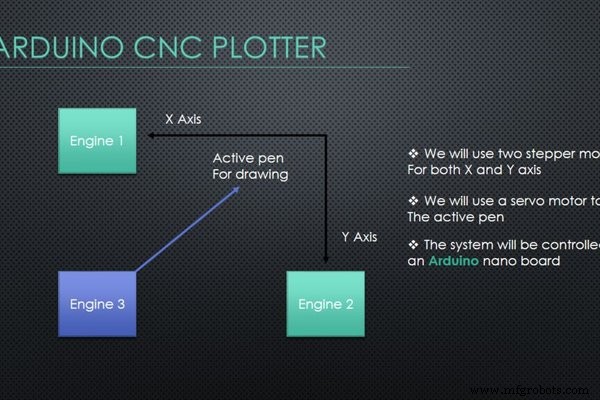
「軸」に言及する別の言葉、はい、各CNCマシンには、コンピュータプログラムによって制御される定義された数の軸があります。
<図>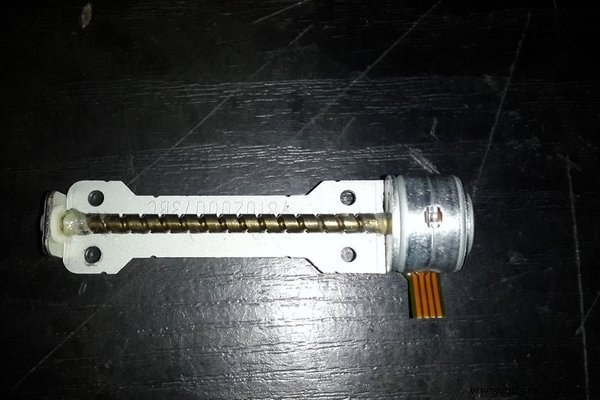
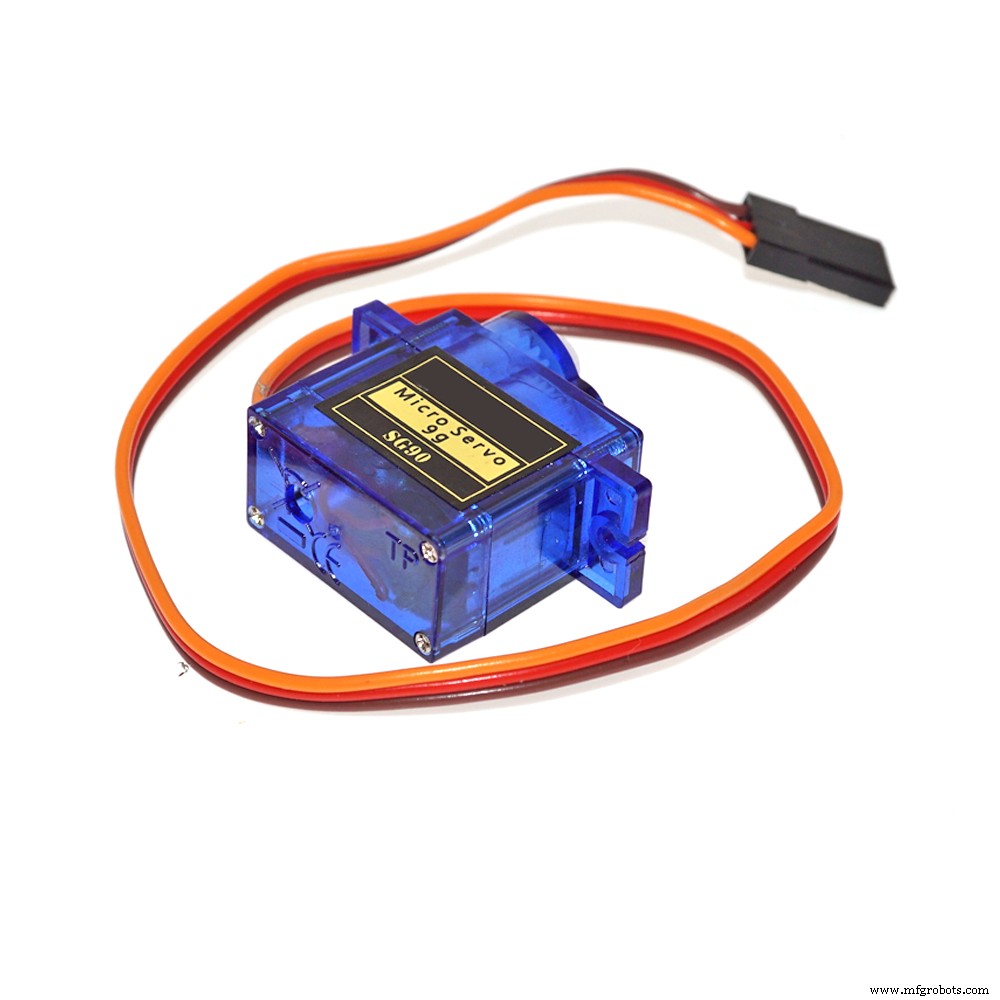
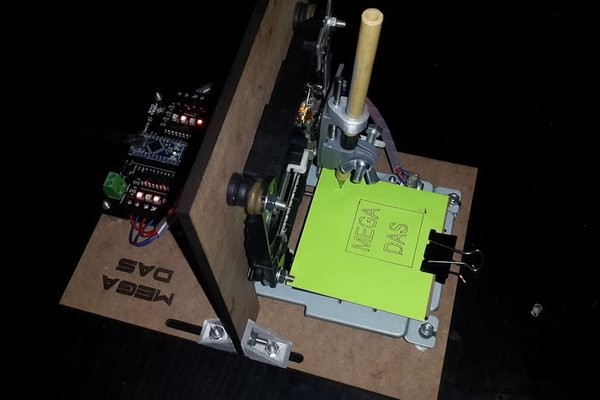
私たちの場合、私たちが作ったCNCプロッターは、軸に小さなステッピングモーターを備えた2軸マシン「写真1の詳細」です。「写真2のステッパー」これらのステッパーは、アクティブトレイを動かし、2軸で動かします。描画ペンを使用して描画デザインを作成することを計画します。ペンは、サーボモーターとなる構造の3番目のエンジンを使用して保持および解放されます。
ステップ2:ステッピングモーターがメインアクチュエーターです
ステッピングモーターまたはステッピングモーターまたはステッピングモーターは、完全な回転をいくつかの等しいステップに分割するブラシレスDC電気モーターです。モーターの位置は、モーターがトルクと速度に関してアプリケーションに合わせて慎重にサイズ設定されている限り、フィードバック用の位置センサー(開ループコントローラー)なしで、これらのステップの1つで移動および保持するように命令できます。 、私たちのプロジェクトのステッピングモーターを入手する場所から、非常に簡単です。次ののような古いDVDリーダーを入手するだけです。 写真。
<図>
2ドルで2つ持っています。次の写真に示すように、ステッピングモーターとそのサポートを取り出すために分解するだけです。
<図>
<図>
 <図>
<図> 
DVDリーダーからモーターを入手したら、モーターコイルを特定することにより、モーターを使用できるようにする必要があります。 終了します。各ステッピングモーターには2つのコイルがあり、マルチメーターを使用して、モーターピンコネクタ間の抵抗を測定することでコイルの端を特定できます。「次の図のように 「そして、各コイルについて、それは約10オーム測定されるべきです。
<図>
モーターコイルを特定したら、いくつかのワイヤーをはんだ付けして、それらを介してモーターを制御します。「次の写真を参照」
<図>

<図>

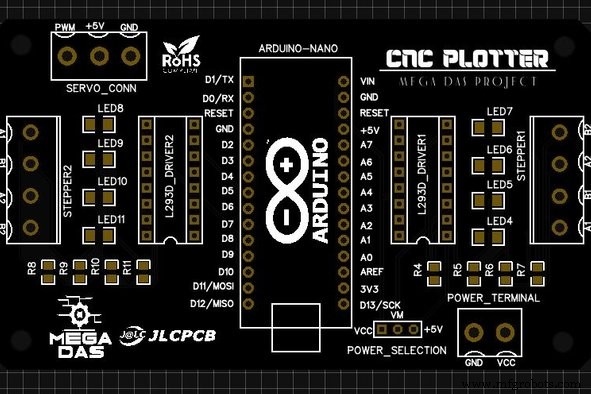
ステップ3:回路図 <図>
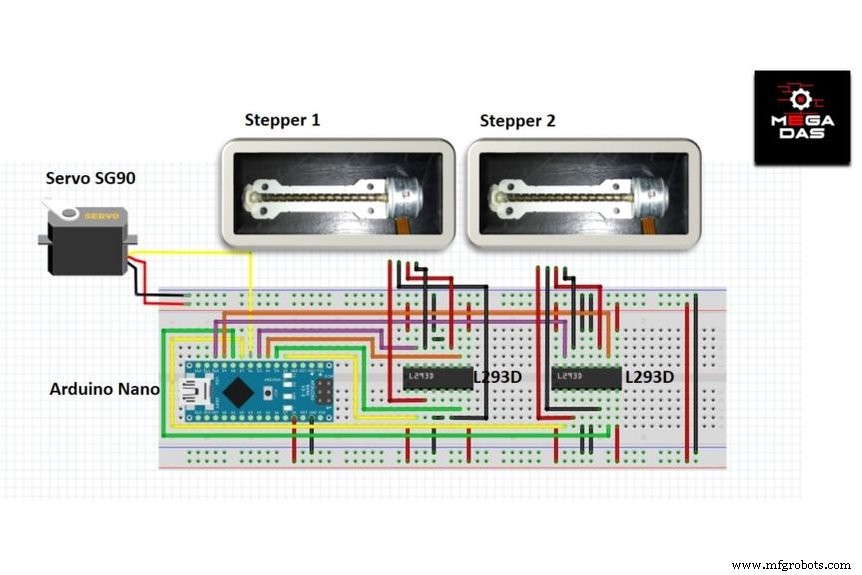
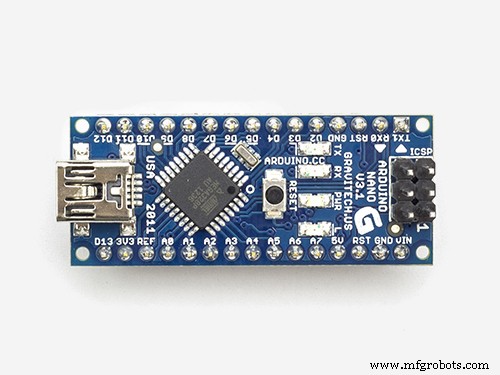
私たちのマシンの心臓部は arduino Nano コンピューターから受け取った指示に応じて各アクチュエーターの動きを制御する開発ボード。これらのステッピングモーターを制御するには、各アクチュエーターの速度と方向を制御するステッピングモータードライバーが必要です。
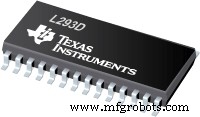
この例では、 L293DHブリッジモータードライバーを使用します。 「写真3を参照」は、arduinoから入力を介して送信されたモーターコマンドを受信し、その出力を使用してステッピングモーターを制御します。
<図>

必要なすべての部品をArduinoボードで接続するために、ステッピングモーターとサーボモーターの両方で同じ接続に従う必要がある最初の図を示す回路図を作成しました。
次の図は、回路図と、Arduinoと他のコンポーネント間のリンクをどのように設定するかを概略的に説明しています。必要に応じて、これらのリンクを調整できます。
<図>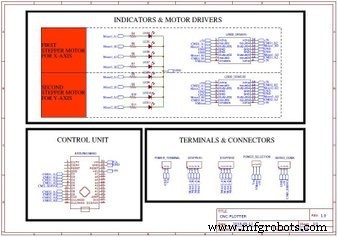
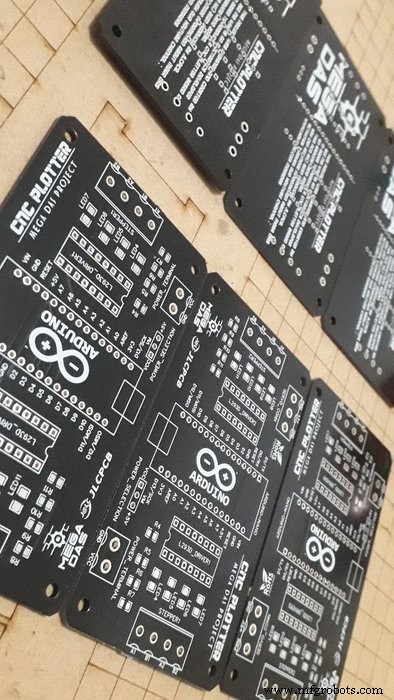
ステップ4:PCB作成(JLCPCBによって作成)
JLCPCBについて
JLCPCB(Shenzhen JIALICHUANG Electronic Technology Development Co.、Ltd。)は、中国最大のPCBプロトタイプ企業であり、迅速なPCBプロトタイプと小ロットのPCB生産を専門とするハイテクメーカーです。 PCB製造で10年以上の経験を持つJLCPCBは、国内外で20万人以上の顧客を抱えており、PCBプロトタイピングのオンライン注文は8000件を超え、1日あたりのPCB生産量は少量です。年間生産能力は20万平方メートルです。さまざまな1層、2層、または多層PCB用。 JLCは、大規模で設備の整った、厳格な管理と優れた品質を特徴とするプロのPCBメーカーです。
<図>
トーキングエレクトロニクス
回路図を作成した後、「次の写真を参照」して作成するためにPCB設計に変換しました。PCBを作成するために、回路を注文するのに最適なPCBサプライヤーと最も安価なPCBプロバイダーであるJLCPCBを選択しました。信頼性の高いプラットフォームを使用すると、クリックするだけでガーバーファイルをアップロードし、PCBの厚さの色や数量などのパラメータを設定できます。その後、わずか2ドルで、5日後にPCBを入手できます。
<図>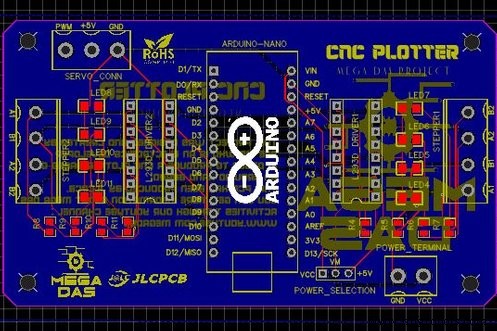
<図>
<図>
<図>
関連するダウンロードファイル
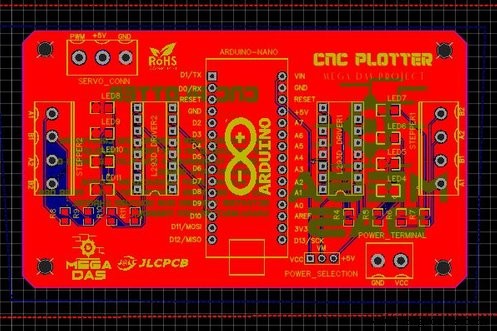
ここからCircuit(PDF)ファイルを入手できます。上の写真でわかるように、PCBは、関連する化学物質の「次の写真」を示しているため、非常によく製造されています。
メインボード用に作成したものと同じPCBデザインを使用しており、はんだ付けの手順をガイドするためにすべてのラベルとロゴがあります。同じ回路設計を注文したい場合は、ここからこの回路のガーバーファイルをダウンロードすることもできます。
<図>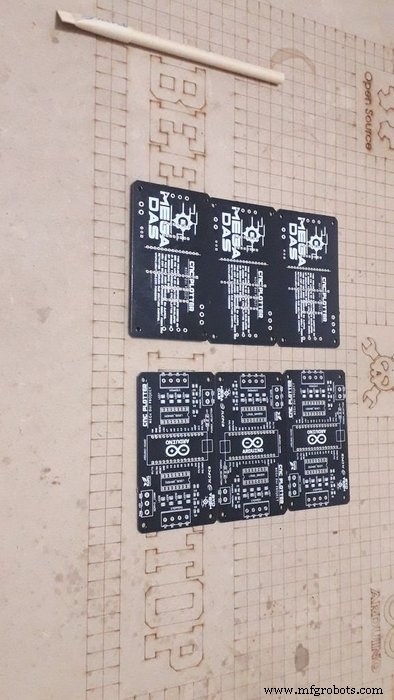
<図>
 <図>
<図> 
ステップ5:マシンのサポートを設計します!
<図>

私たちのマシンの外観をより良くするために、 Solidworksソフトウェアを使用してこれらの3つのパーツを「写真1を参照」で設計することにしました。 、これらのパーツは、DVDリーダーを組み立てるのに役立ちます。これらのパーツのDXFファイルを入手し、ファブラボチュニジアの友人の助けを借りました。 CNCレーザー切断機を使用して設計された部品を製造しました。これらの部品を製造するために、5mmのMDF木材を使用しました。
<図>
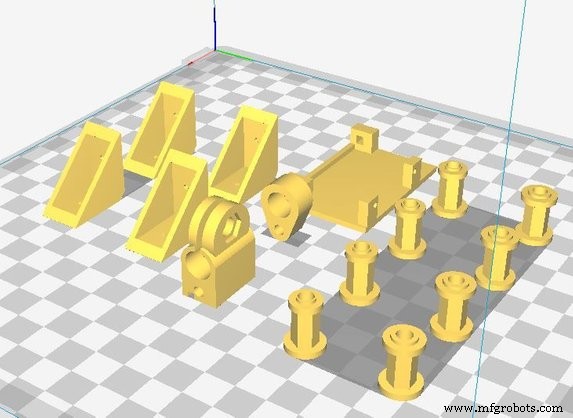
ドローイングペンホルダーであるさらに別のデザインは、3Dプリントプロセスを経てそれを手に入れました。また、以下のリンクからすべての関連ファイルをダウンロードできます。
ステップ6:材料 <図>
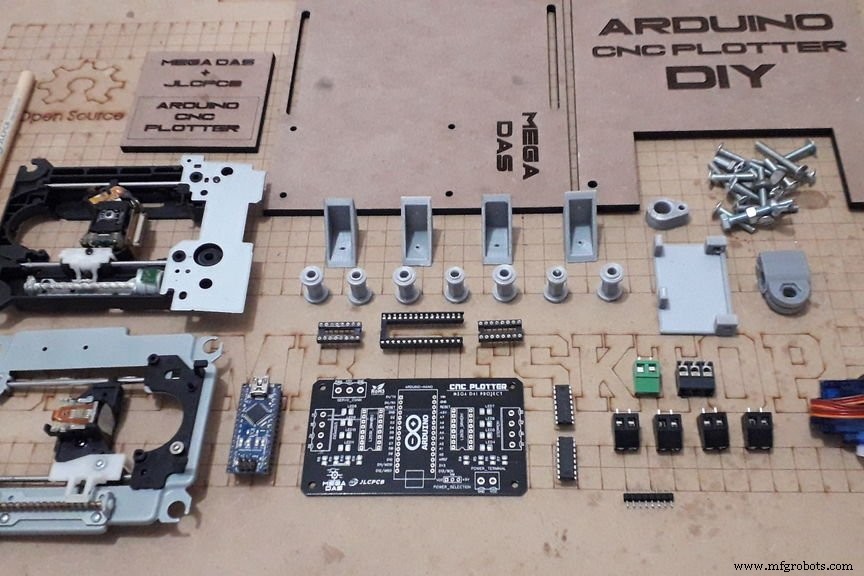
それでは、このプロジェクトに必要なコンポーネントを確認しましょう。前述のようにArduino Nanoを使用しています。これが、私たちのマシンの心臓部になります。このプロジェクトには、ドライバーICとサーボモーターを備えた2つのステッピングモーターも含まれています。適切なアイテムの推奨されるアマゾンリンクを以下に示します
この種のプロジェクトを作成するには、次のものが必要です:
- JLCPCBに注文したPCB
- Arduino Nano:https://amzn.to/2SDSTgO
- 2 x L293D Hブリッジドライバー:https://amzn.to/2C6PWyb
- 2 xICソケットDIP16ピン:https://amzn.to/2RAyCvu
- 1 x ICソケットDIP:https://amzn.to/2SPXMTW
- SILおよびネジヘッダーコネクタ:https://amzn.to/2Ril1JC
- 1 xサーボモーターSG90:https://amzn.to/2VEsAZF
- 2 x DVDリーダー:
- 3Dプリントパーツ
- レーザー切断部品
- アセンブリ用のネジ
- JLCPCBまたはその他の描画ペンからギフトとして受け取ったペン
ステップ7:電子アセンブリとテスト
<図>
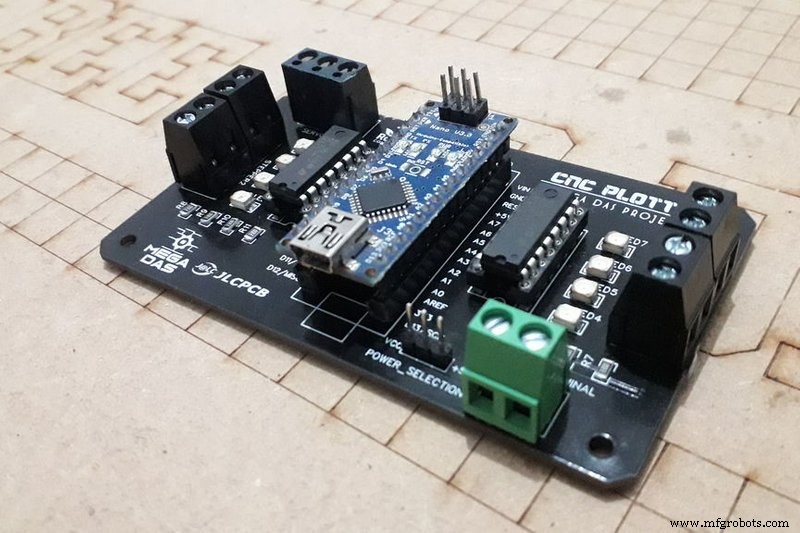
次に、すべての電子部品のはんだ付けアセンブリに移ります。いつものように、一番上のシルク層には、ボード上の配置を示す各コンポーネントのラベルがあります。これにより、はんだ付けの間違いをしないことが100%確実になります。
<図>
いくつかのテストを行います
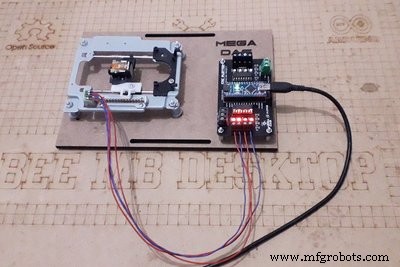
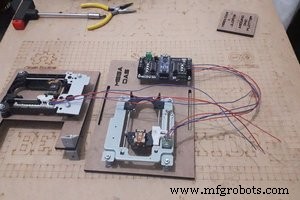
電子部品をはんだ付けした後、「最初の写真を参照」、DVDリーダーをX軸プレートにねじ込み、メインボードに対しても同じことを行いました。モーターワイヤーをねじヘッダーに配置して、ステッピングモーターテストを使用して簡単なテストを行いました。コード「次の図を参照」。ご覧のとおり、ステッパーは正常に動き、正しい方向に進んでいます。
<図>
/ ******************************************* ************************************************** ************************************************** ************************* *-作成者:BELKHIR Mohamed * *-職業:(電気Ingineer)MEGADAS所有者**-主な目的:産業アプリケーション**-著作権(c)所有者:無断転載禁止**-ライセンス:BSD2-条項ライセンス**-日付:2017年4月20日** *************** ************************************************** ************************************************** ******************************** ******************** // **************************** *******注************************************** ///再配布以下の条件が満たされている場合、変更の有無にかかわらず、ソースおよびバイナリ形式での使用が許可されます。//*ソースコードの再配布では、上記の著作権表示、この//条件のリスト、および次の免責事項を保持する必要があります。 // *バイナリ形式での再配布では、上記の著作権表示、//この条件のリスト、および//配布に付属するドキュメント//および/またはその他の資料の次の免責事項を複製する必要があります。//このソフトウェアは著作権所有者によって提供され、寄稿者は「現状有姿」//および//商品性および特定の目的への適合性の黙示の保証を含むがこれに限定されない明示的または黙示的な保証は否認されます/ *─▄▀▀‖‖‖▀▀▀ ▀▀▀▀▀▀▀▀▄█░░░█░░░░░░░░░░▄▄░██░█ █░▀▀█▀▀░▄▀░▄▀░░▀▀░▄▄░██░░░▀░▀░▄▄▄▄▄▄▄▄▄▄▄▄▄▄▄▄▄▄▄▄▄▄▄ ▄▀─────▀▄▄▄▄▄▄▀* /#include //ステッピングモーターを含めるMotorlibrarie const int stepPerRotation =20; //順番のステップ数。 CD / DVD //の標準値X軸ステッピングモーターを示しますピンステッパーmyStepperX(stepPerRotation、8,9,10,11); void setup(){myStepperX.setSpeed(100); //ステッピングモーターspeedmyStepperX.step(100); delay(1000); myStepperX.step(-100); delay(1000);} void loop(){}
ステップ8:機械部品の組み立て
2番目のステッピングモーターをY軸プラットにねじ込むことによって構造の組み立てを続けます「次の写真を参照」。
<図>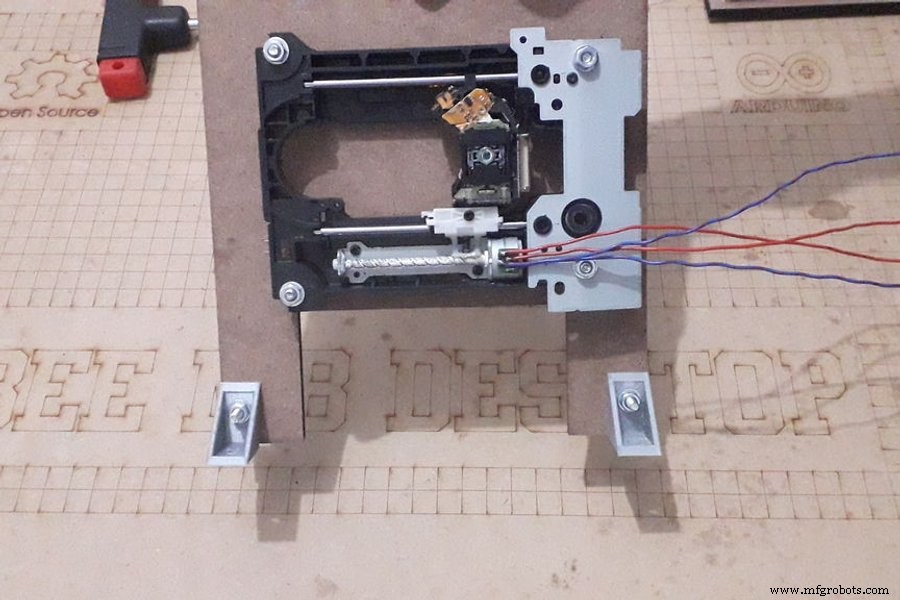
Y軸を準備すると、両方の軸で、最初のステップ「次の2つの写真を参照」で説明した2軸計画を作成できるようになります。あなたがする必要があるのは、2つの軸を90°に配置することだけです
<図>
<図>

ペンホルダーの作り方
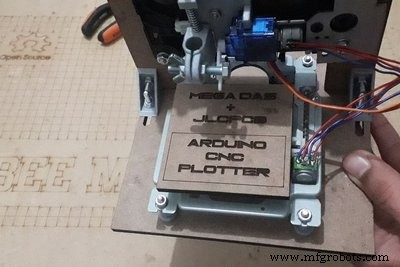
小さな斧をバネに入れて3Dプリントのペンホルダーを保持することでペンホルダーを準備し、サーボモーターをその配置にねじ込みます「写真4を参照」。ペンホルダーの準備ができたので、ステッピングモーターの手順「写真5を参照」に従ってY軸上をスライドできるようにするために、ホットグルーまたはその他の手段を使用してY軸を使用し、アクティブなプラットフォームをX軸のキャリッジに貼り付けます「写真6を参照」。そして、ボード上のコネクタにエンジンワイヤをねじ込むことで終了します。いくつかの調整を行った後、アクションの準備が整った機械設計ができました。「写真7を参照」。
<図>

<図>

<図>
<図>

ステップ9:ソフトウェアパーツ <図>
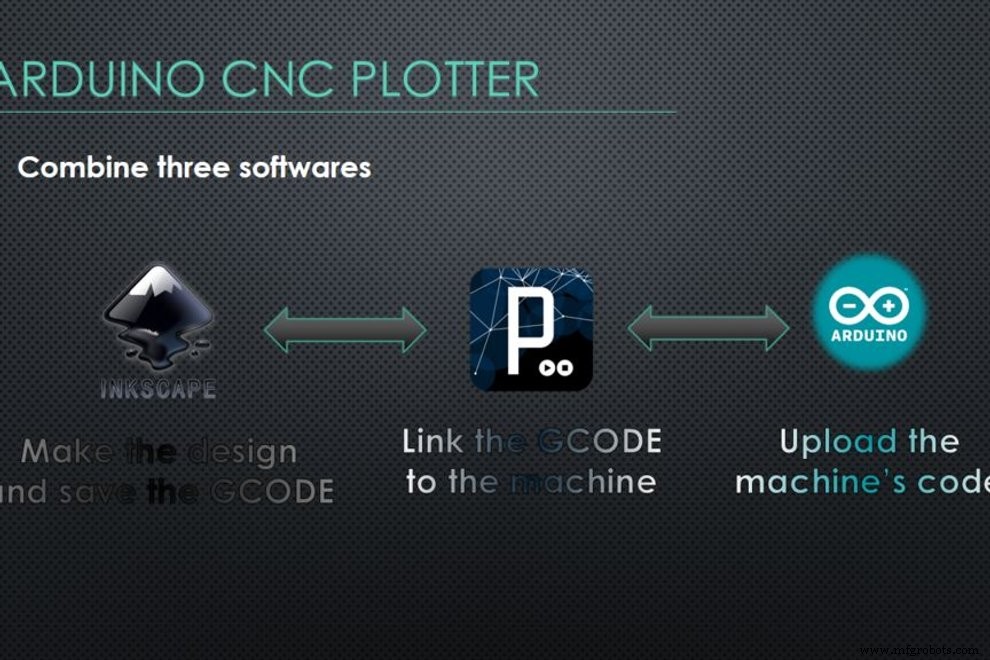
ソフトウェアの部分に移り、マシンを生き生きとさせるために3つのソフトウェアを組み合わせます。最初の写真で簡単に説明しました。マシンに必要なgcodeファイルを生成するInkscapeソフトウェアを使用してデザインを作成します。 gcode命令を理解するために、Arduino IDEソフトウェアを使用してアップロードされる独自のコードがマシンにある必要があります。最後の部分は、マシンのコードをgcodeファイルにリンクする方法です。これは、処理ソフトウェアによって実行されます。
>最初のステップは、githubに投稿されたリンクからダウンロードできるarduinoボードスケッチをアップロードすることです。shcematicに応じてステッピングモーターのピンを更新することを忘れないでください。
Gcodeの「Inkscape」の準備
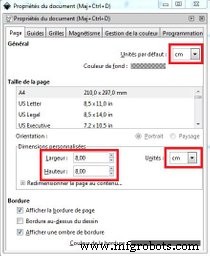
次に、Inkscapeに移動し、紙のフレームやユニットなど、いくつかのパラメータを調整します。「次の2つの画像を参照」。
<図>
<図>
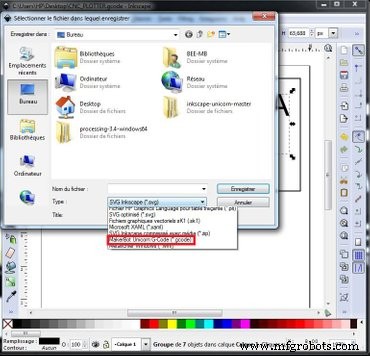
デザインを準備し、MakerBatユニコン形式で保存します。「次の2つの画像を参照」。この形式がInkscapeバージョンで使用できない場合は、新しいウィンドウをクリック(保存)すると、アドオンを配置して使用できます。 Gcodeファイルのパラメータ調整用に表示されます。
<図>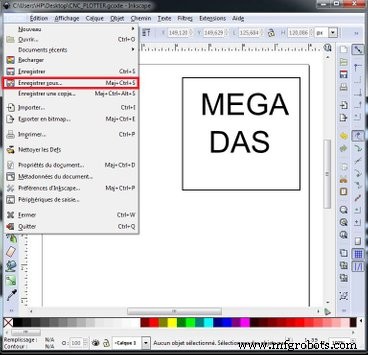
<図>
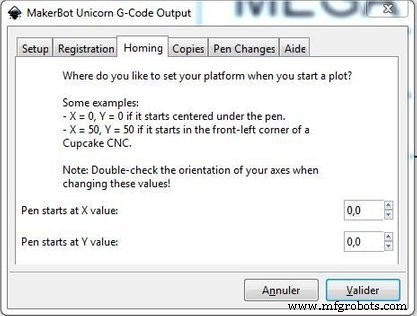
あなたがする必要があるのは私たちと同じ調整に従うことだけであり、すべてがうまくいくでしょう「次の3つの写真」に従ってくださいそしてあなたはこれらのパラメータをこのように設定しますそしてあなたはあなたのgCodeファイルを持っています。
<図>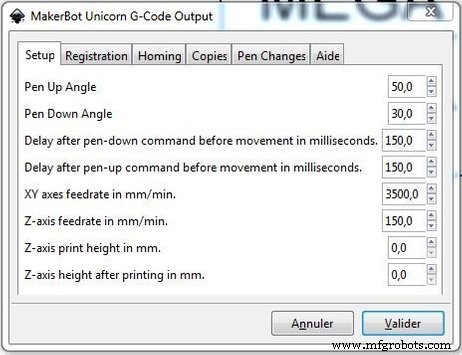 <図>
<図> 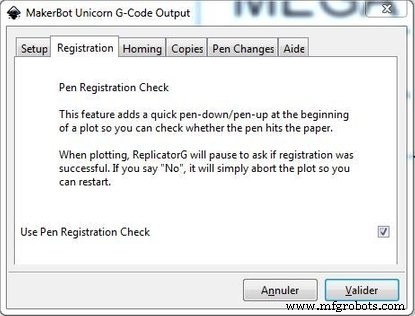
<図>
マシンをGcodeファイルにリンクする 'Processing 3'
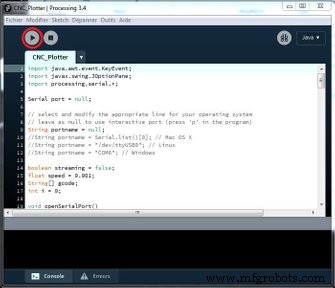
処理ソフトウェアに移行すると、ArduinoIDEに少し似ています '次の画像を参照してください'
<図>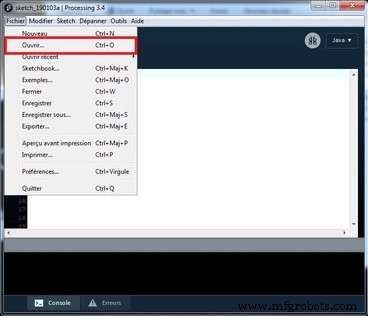
したがって、Githubの同じリポジトリからダウンロードして実行できる「CNCプログラム」ファイルを開く必要があります。「次の2つの画像を参照してください」。
<図>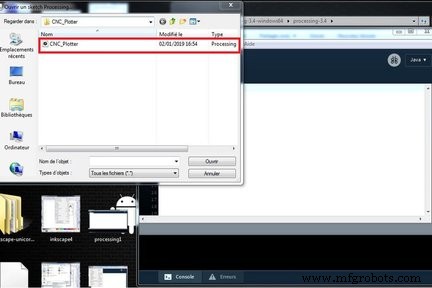
<図>
2番目のウィンドウが表示されます。後者のpを押す必要があります キーボードでマシンのCOMポートを選択し、「次の画像を参照」し、後者のgを押します 目的のgcodeファイルを選択するには、それを選択すると、マシンが直接描画を開始します。
<図>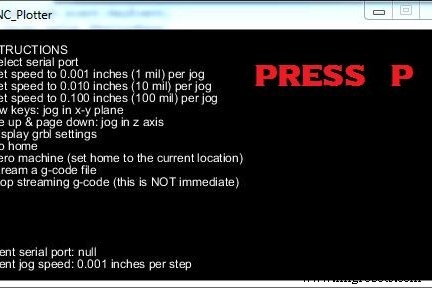
ステップ10:テストと結果
そして、ここでいくつかのテストを行います。Gcodeファイルをアップロードすると、マシンが描画を開始し、各ステッピングモーターに送信されたシーケンスを示すLEDのちらつきが本当に気に入りました。
<図>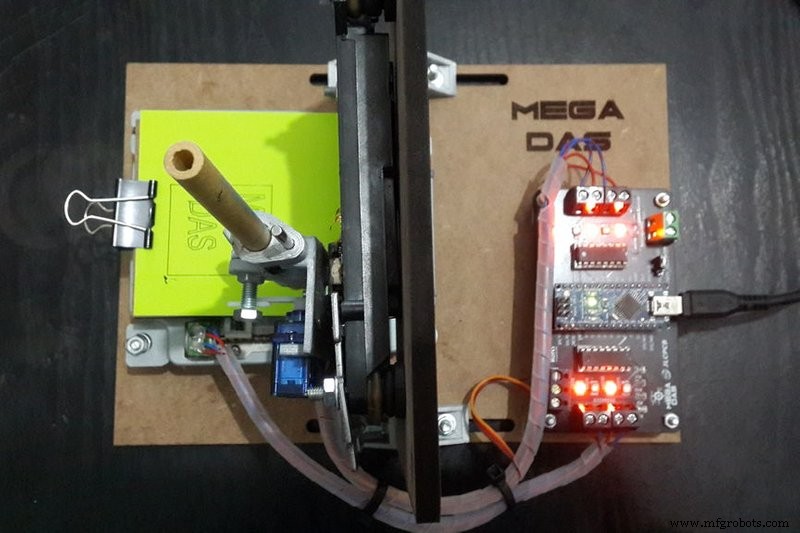
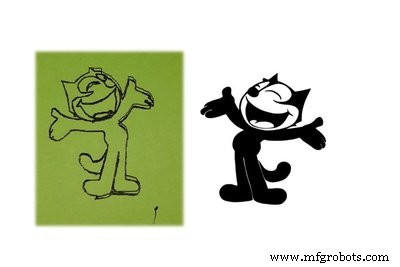
デザインは非常によくできていて、プロジェクトが素晴らしく、簡単に作成できることもわかります。
<図>
<図>

<図>
<図>
 <図>
<図> 
「独自のArduinoトレーニングプラットフォームを作成する方法」という以前のプロジェクトを忘れずにご覧ください。さらにすばらしい動画をYouTubeチャンネルに登録してください。
最後に、毎日電子機器を使用していることを確認してください。
MEGADASのBEEMBでした。またね!
コード
CNC_Plotter必要なすべてのソフトウェア
このリポジトリには、このプロジェクトを完了するために使用したすべてのファイルがありますhttps://github.com/BEEMB/CNC_Plotter カスタムパーツとエンクロージャー
STLおよびDXFファイル
このリンクで、thingiverse.com でレーザーカットパーツと3DプリントパーツCADファイルを作成するために必要なすべてのファイルを見つけてください。 回路図
このファイルには、プロジェクトの回路図(PDF形式)と関連するPCBのガーバーファイルが含まれています製造プロセス