


自動360°写真ターンテーブル
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
アプリとオンラインサービス
>  |
|
このプロジェクトについて
写真のターンテーブルは、写真家が360度の物体や人物の画像やビデオを撮影するために使用する丸いドックです。オブジェクト自体がプレートの真ん中にあり、手動または自動で回転するため、あらゆる角度から製品の良いショットを撮ることができます。
この写真用ターンテーブルの何が特別なのですか?
自動です – 写真 ターンテーブルは完全自動です 、つまり、テーブルを回転させたり、カメラをクリックしたりする必要はありません
カメラテーブルの同期 –テーブルとターンテーブルの両方をトリガーするようにプログラムされています(現時点ではキャノンのみ、申し訳ありませんがニコン)。ボタンを押すと、カメラが回転してトリガーされるため、座ってリラックスできます
正確でセットアップが簡単 – より高い精度を実現するステッピングモーターを使用しました 撮影したい角度を制御します
回路の構築を開始するには、ここをクリックしてください。
力学
レーザーカットパーツ
写真のターンテーブルには4つのレーザーカットパーツがあります。パーツに応じて、3つの異なる厚さの白いプレキシガラスを使用しました。 Pololuは、手頃な価格のレーザー切断サービスを提供しています。
パーツは次のとおりです:
- 丸皿– 10mmプレキシガラス
- 2つの歯車– 8mmプレキシガラス
- ベースケーシング– 3mmプレキシガラス
.aiファイルはThingiverseにあります。
<図>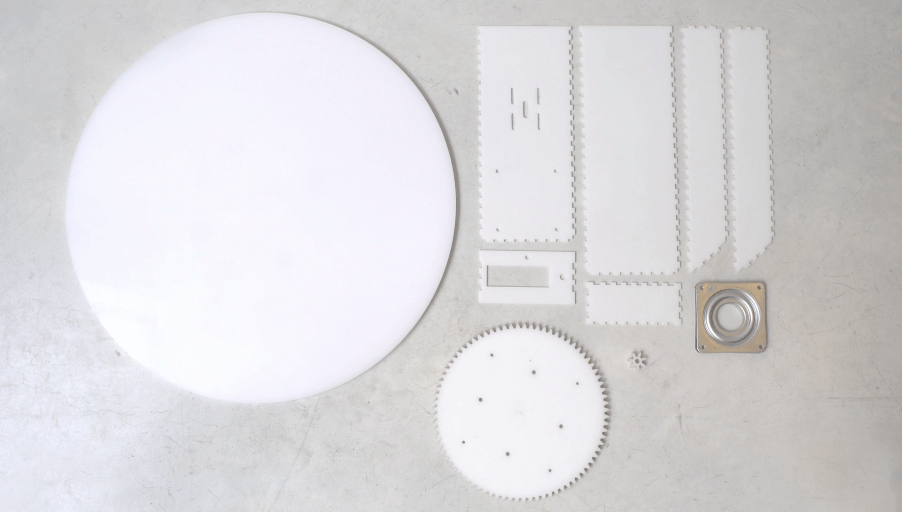
geargenerator.comを使用して歯車を設計し、 Illustrator にエクスポートしました。 ピースをねじ込むためのドリル穴を追加しました。
小さなギアでは、ドリル穴を少し小さくして、ステッピングモーターにしっかりと固定します。
メーカーケースを使用してケースを設計し、接着したTスロットを選択しました。ケースをデザインした後、ファイルをIllustratorにエクスポートし、LCDディスプレイ用のスペースを確保しました。
材料とツール
プレート、ギア、ケーシングを相互に接続するには、次のものが必要です。
- レイジースーザンベアリング
- 4 X M312mmネジ
- 4 X M316mmネジ
- 8 X M412mmネジ
- 8 XM4ナット
- 4 xM3真ちゅう製ネジ付きインサート
- 8 x M35mmめねじ真ちゅう六角スペーサーまたは8x M35mm真ちゅうねじインサート
材料:
- アクリル接着剤
- 瞬間接着剤
ツール:
- 電気ドリル
- はんだごて
- キャリパー
エレクトロニクス
主なコンポーネント
- Arduino Uno
- ステッピングモーター
- ロータリーエンコーダー
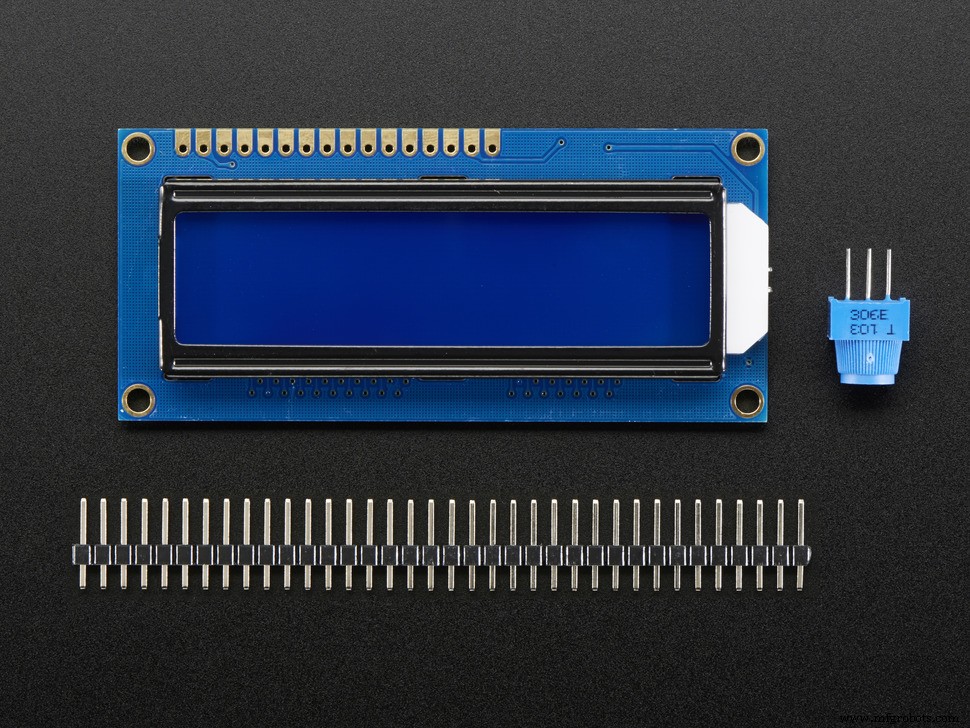
- LCD 16 * 2 I2C
- IR主導
二次コンポーネント
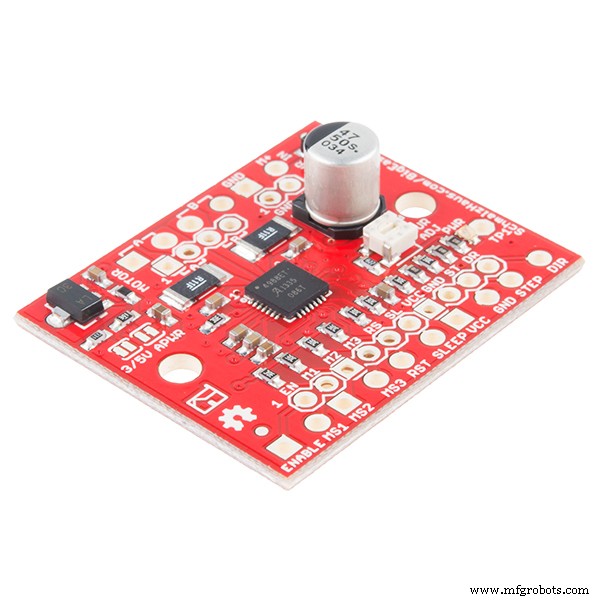
- 簡単なドライバー
- トランジスタ+抵抗
- メスバレルジャック
配線
詳細な配線図については、ここをクリックしてください。
<図>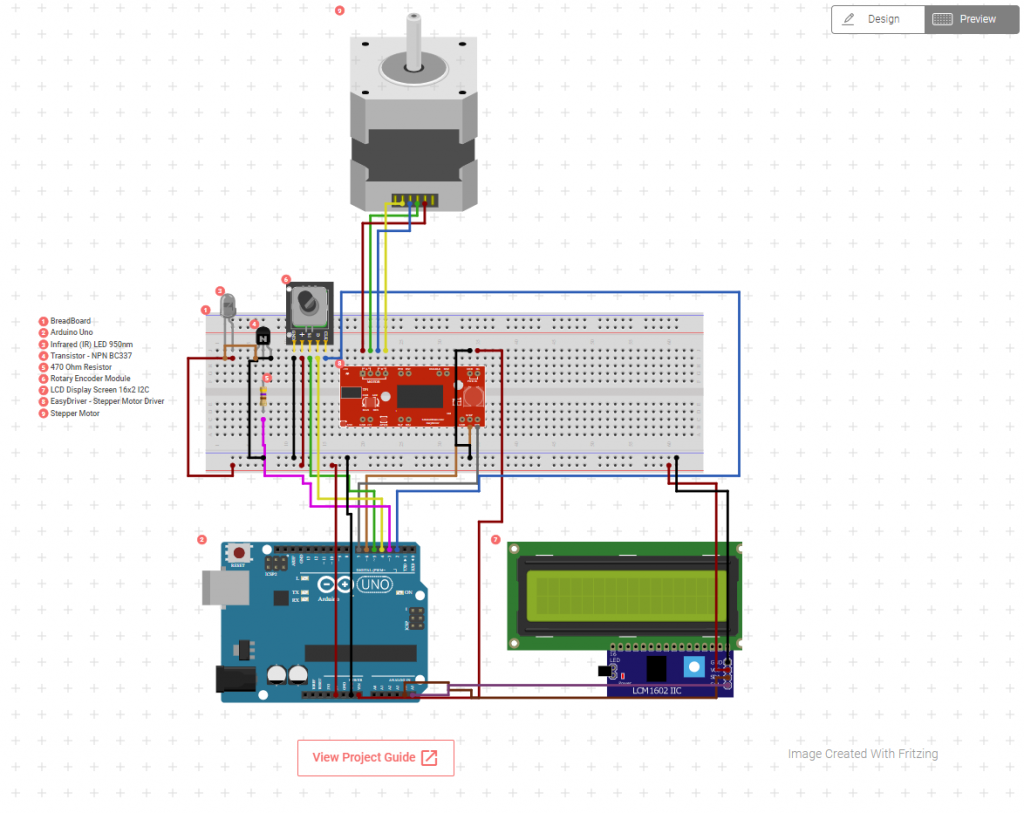
ステップバイステップガイドとコードについては、[部品表]タブに移動し、[プロジェクトガイド]をクリックしてください。
すべてが正しく接続され、機能していることを確認したら、小さなシールドを作成できます。 。シールドは永久回路に適しています そしてそれらはよりコンパクトです。 一方、ブレッドボードは、コンポーネントを簡単に接続および切断できるため、テストと計画に適しています。
これらのコンポーネントを選択した理由
- ステッピングモーター–正確で使いやすい。ステッピングモーターのプログラミングは、角度間のステップ数をカウントするように設定できるため、はるかに簡単です。
- カメラトリガー用の赤外線LED-最小限のセットアップでワイヤレス接続が必要でした。キヤノンのカメラのIRコードを見つけ、それに応じて設定しました。ニコンでも同じことができます。
- ロータリーエンコーダー–メニューにローカルオプションを使用し、ロータリーエンコーダーを備えたLCD画面を追加することにしました。 Wifiモジュールを接続し、IoTダッシュボードを作成して、写真のターンテーブルをワイヤレスで制御することもできます。
コード
コードを使用する手順
- circuito.ioからテストコードをアップロードして回路をチェックします
- Githubリポジトリにアクセス
- photo-turntable.inoをダウンロード
- 16行目からコードをコピーします(「ライブラリを含める」を残します) 」と「ピンの定義 」元のコードから)
- ピンが正しく設定されていることを確認してください
- 新しいコードをアップロードする
コードロジック
このコードは、16×2 LCDと、プッシュボタンも備えたロータリーエンコーダーを使用して基本メニューを実装しています。
Firmware.ino全体で、次のことがわかります。
- ピン宣言
- コンポーネントの設定
- コンストラクター
- setup()関数 Circuito.ioによって提供されます。
ループ関数 ロータリーエンコーダの状態を読み取ることから始まります、 L eftまたは R ight、およびそのボタンも。
メニュー スイッチケースの有限状態マシンを使用して実装されます–さまざまな状態をナビゲートします:
ビデオ–ビデオモードに入るCHANGESPEED –ターンテーブルの速度を0〜100%に設定
- 速度
- VIDSTART –ビデオモードでターンテーブルを開始します
- VIDBACK –ホームに戻る
STILLS –静止画モードに入るCHANGEANGLES –角度の数を設定する
- 角度
- STILSTART –静止画モードでターンテーブルを開始します
- STILBACK –ホームに戻る
- ホーム–アイドル
切り替え エンコーダーの回転を使用して状態間。
選択 ボタンをクリックしてください。
2つの状態: SPEED および角度 静止画モードでの停止点の数とビデオモードでの回転速度の原因となる変数を変更できます。
VIDSTART – video()関数を呼び出します:
- 録音開始を送信します IRLEDを使用したカメラへのIRコード。
- 選択した速度でテーブルの回転を開始します 全体の回転のために。
- 記録の停止を送信します IRLEDを使用したカメラへのIRコード
注:
テーブルのスムーズな開始と停止のために、最初と最後の600ステップで3次の加速と減速を実装しました。
STILSTART –stills()関数を呼び出します。
- 1回転を設定された角度の数で割ります
- 角度ごとに、シングルスチルショットIRコードを送信します IRLEDを使用してカメラに
- 次の角度に達するまでテーブルの回転を開始します
注–テーブルのスムーズな開始と停止のために、最初と最後の600ステップで3次の加速と減速を実装しました。
まとめる
- すばやく簡単に組み立てるために、プロトタイプシールドを使用しました。これにより、コンポーネントとArduinoをジャンパー線とオスヘッダーで快適に接続できます。
- ジャンパー線2ピン–IRLED用
- ジャンパー線4ピン–LCD用
- ジャンパー線5ピン–ロータリーエンコーダー用
- 電源とArduinoを接続するために、 DCバレルジャックプラグ–オスを使用して延長コードを作成しました および DCバレルジャック–パネルマウント 、ワイヤをアースにはんだ付けし、それらの間のVCCをはんだ付けします。 パネルマウントバレルジャックを接続しました 背面パネルに、男性はArduinoに。このようにして、電源を後壁に接続できます。
以下の画像と一緒に指示に従ってください:
<図>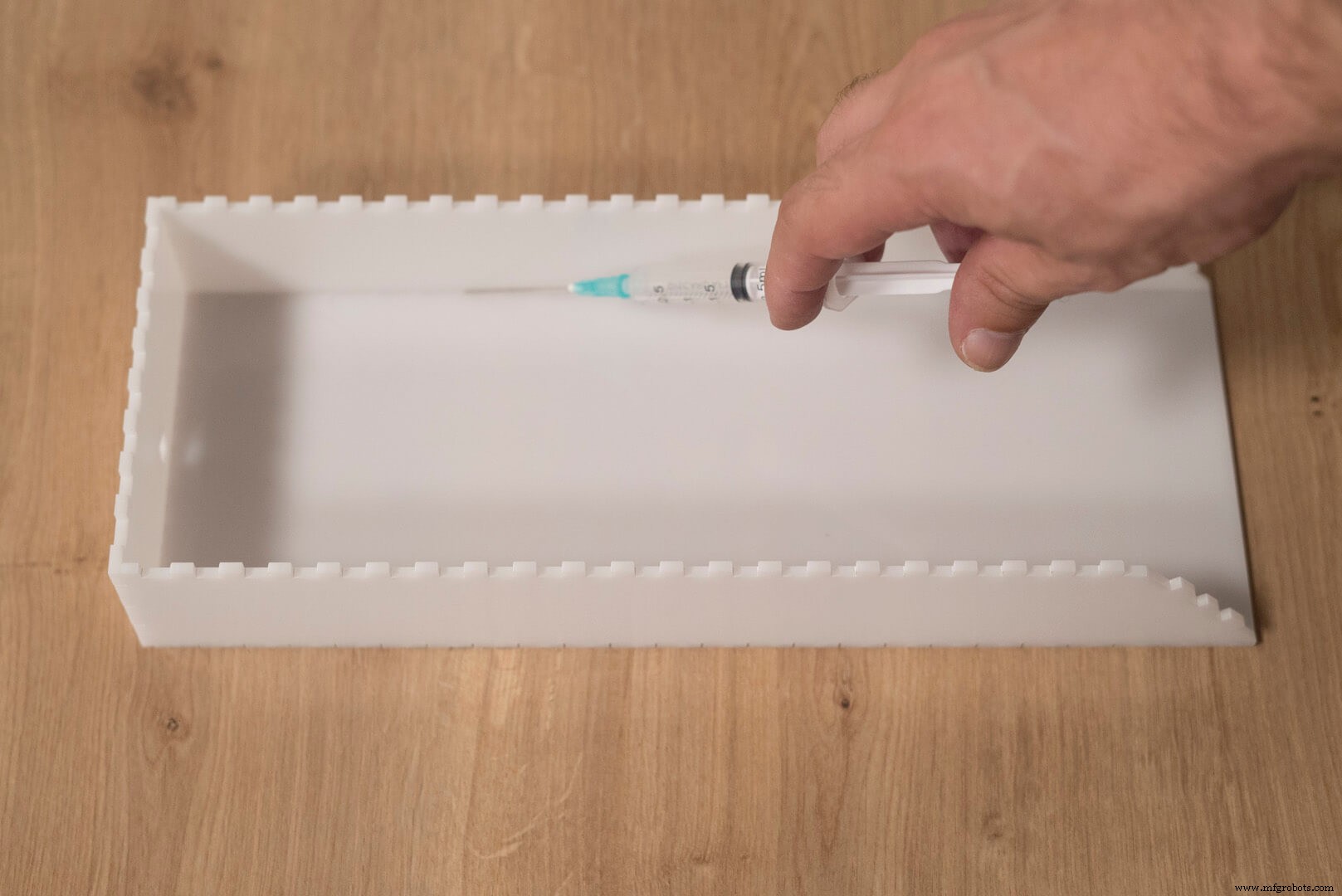 <図>
<図>  <図>
<図>  <図> <図>
<図> <図>  <図>
<図> 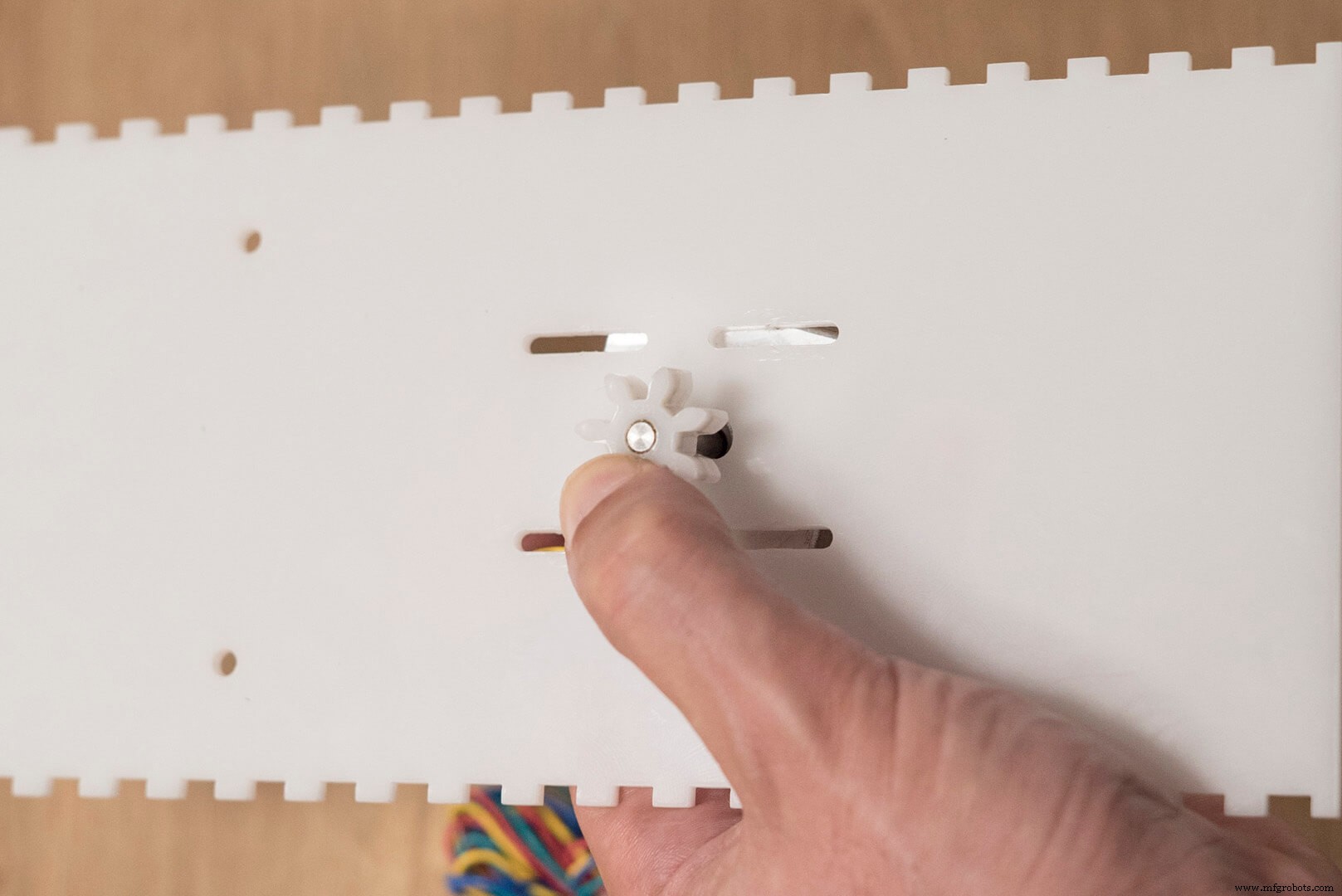 <図>
<図> 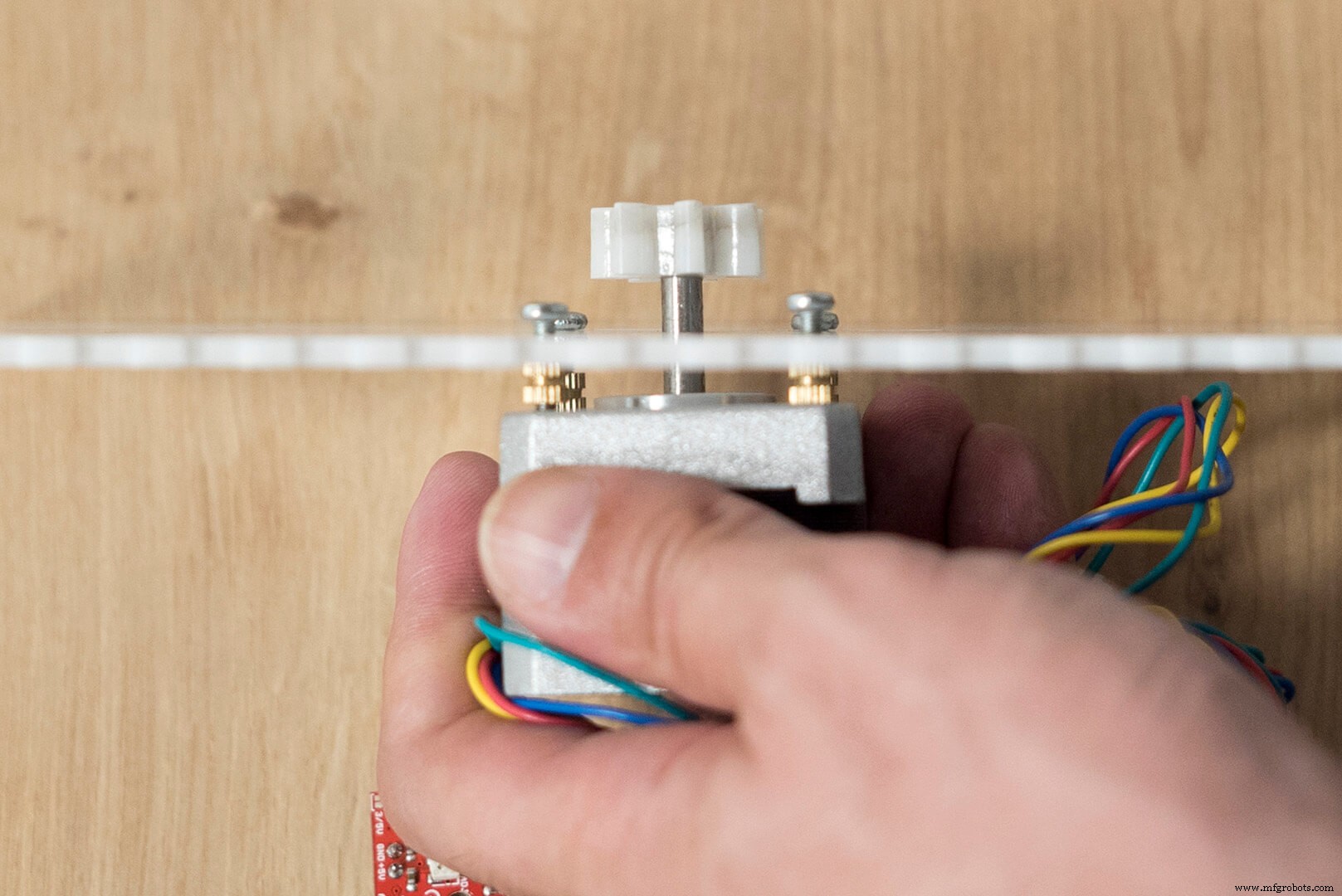 <図>
<図>  <図>
<図> 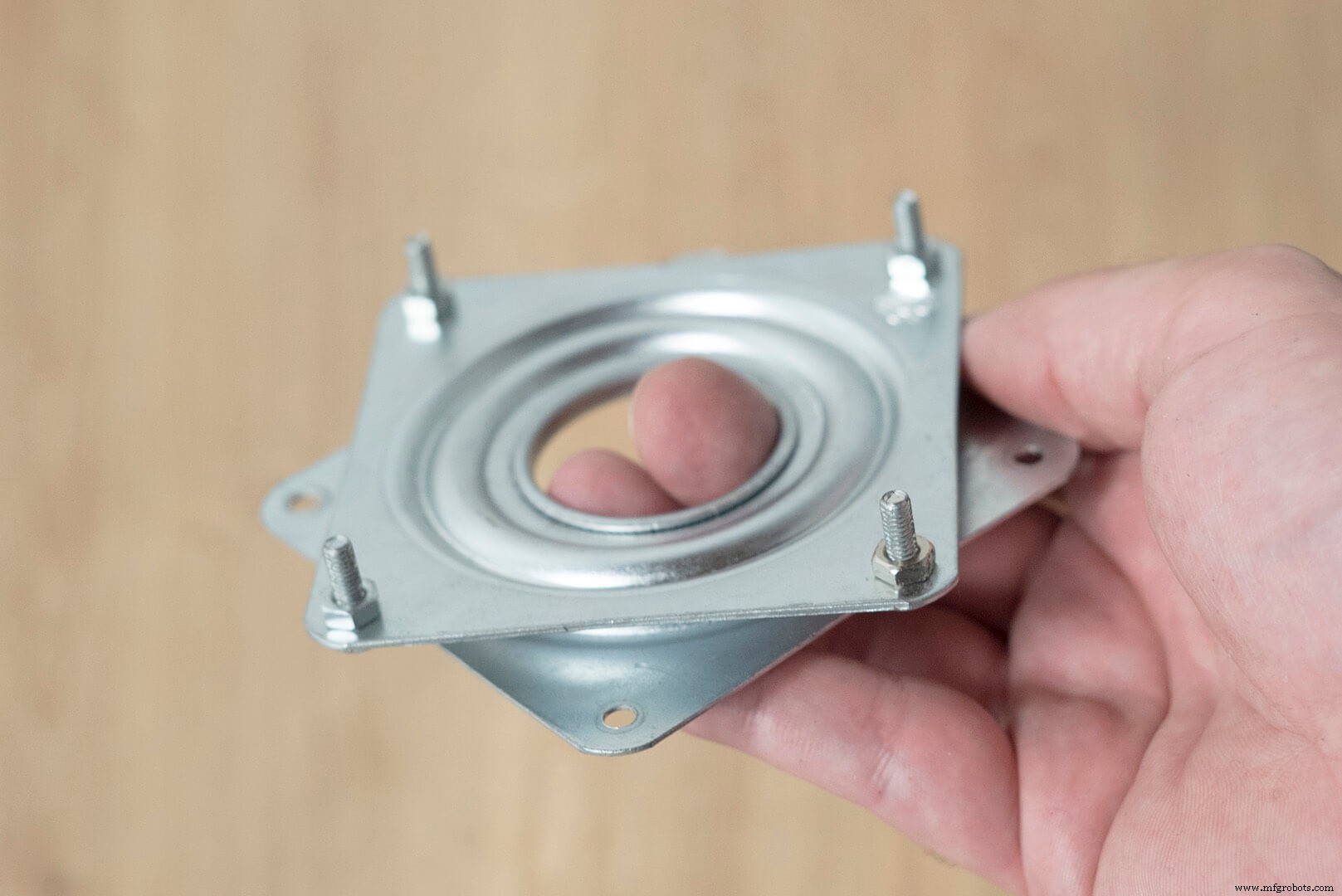 <図>
<図> 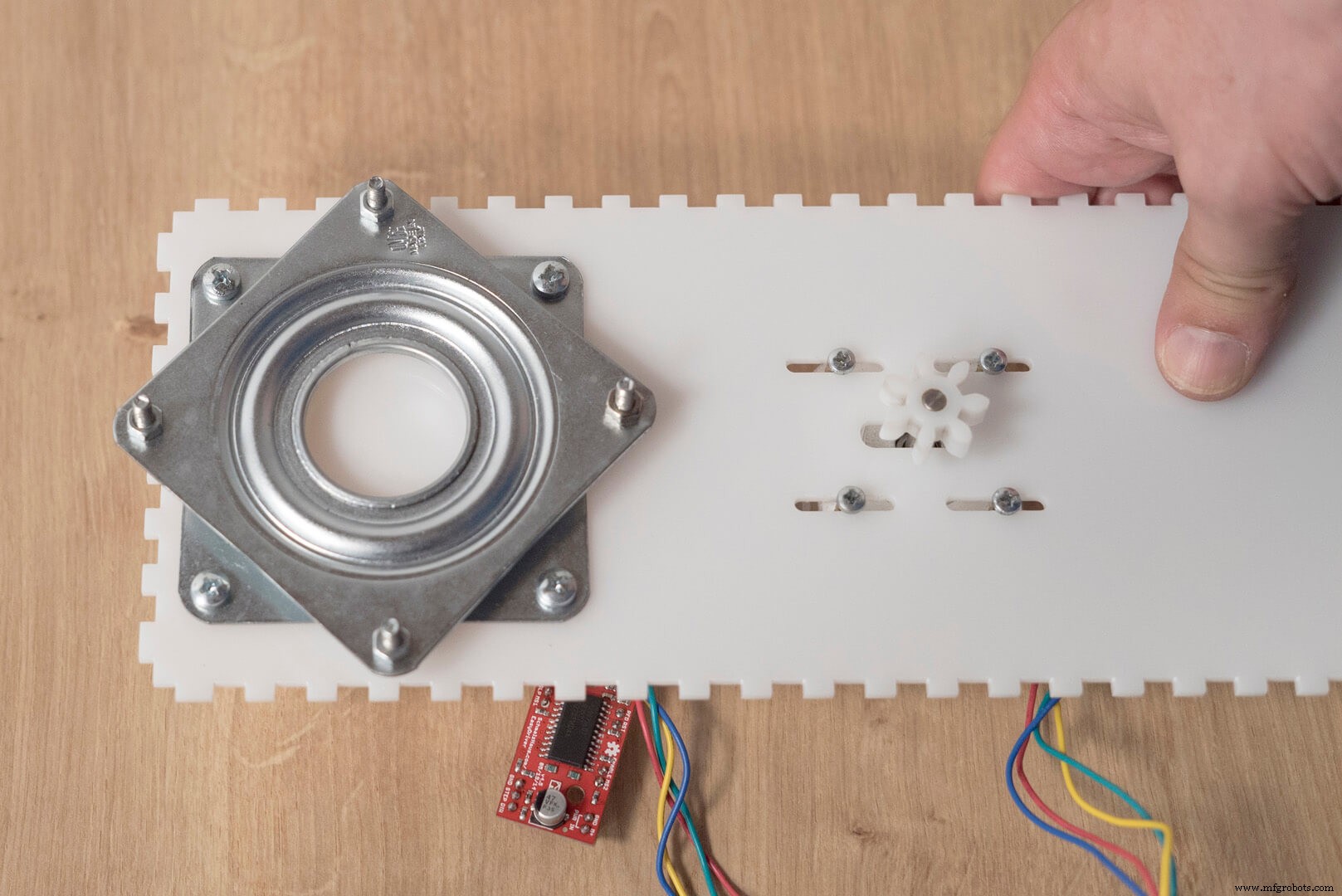 <図>
<図>  <図>
<図> 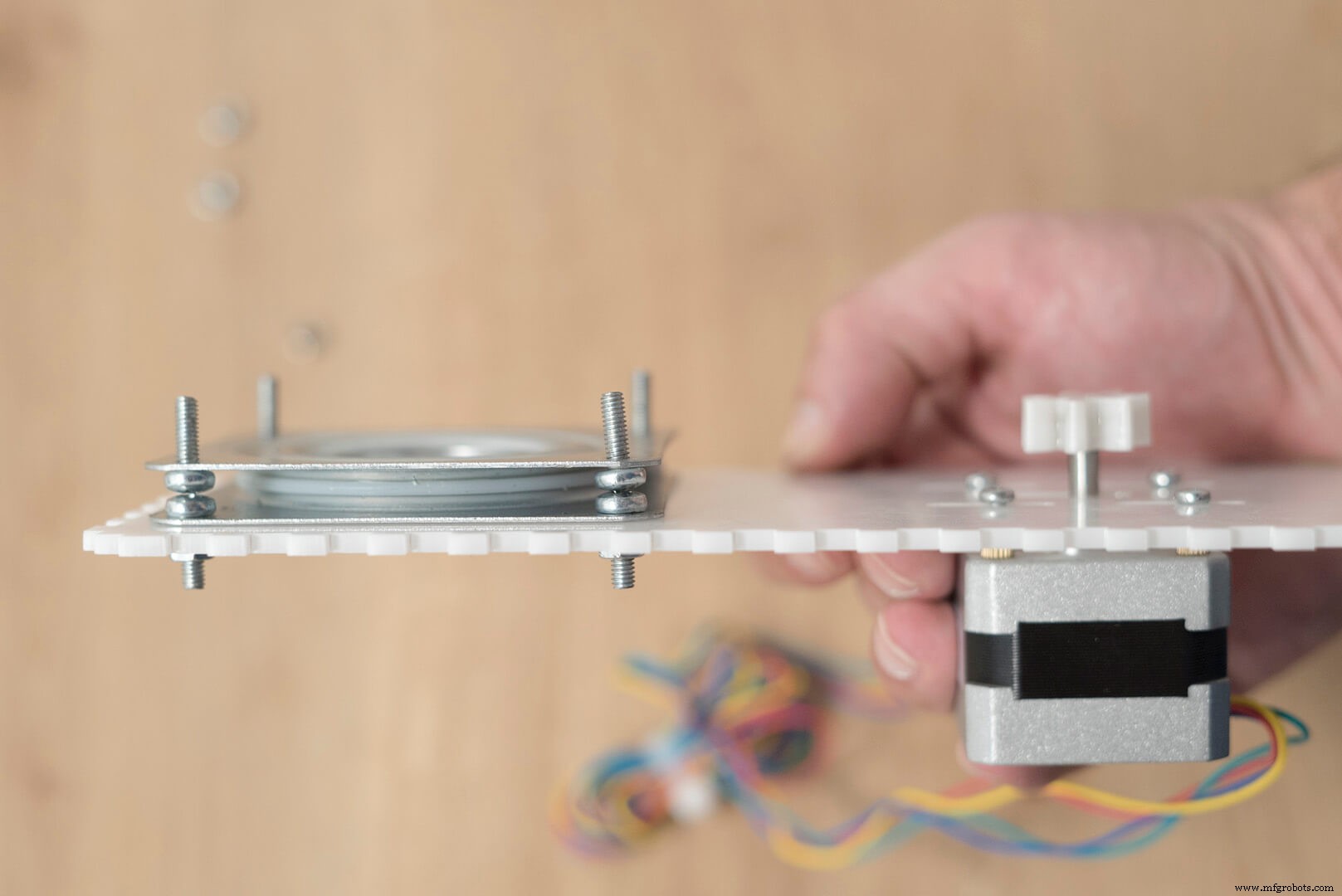 <図>
<図> 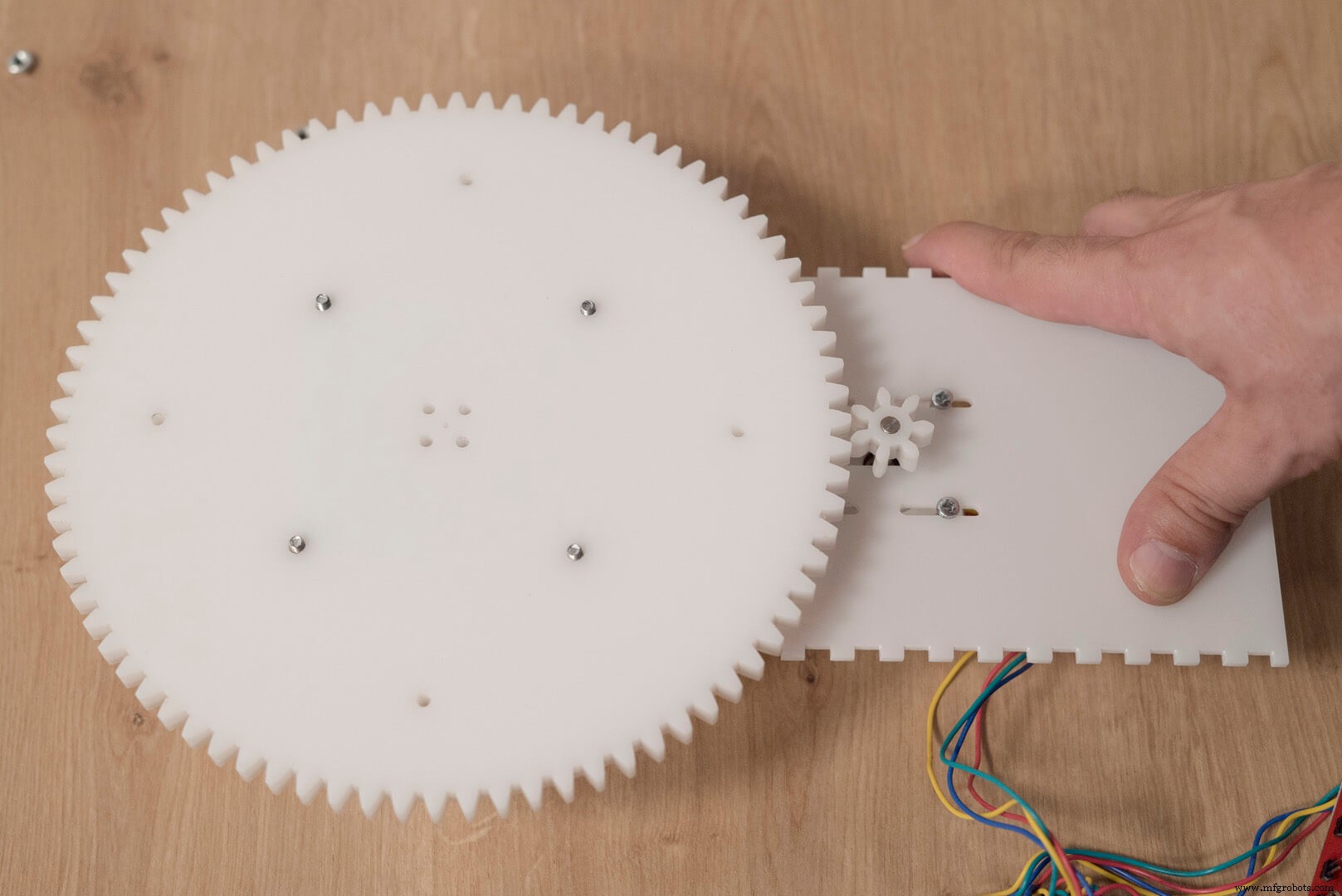 <図>
<図> 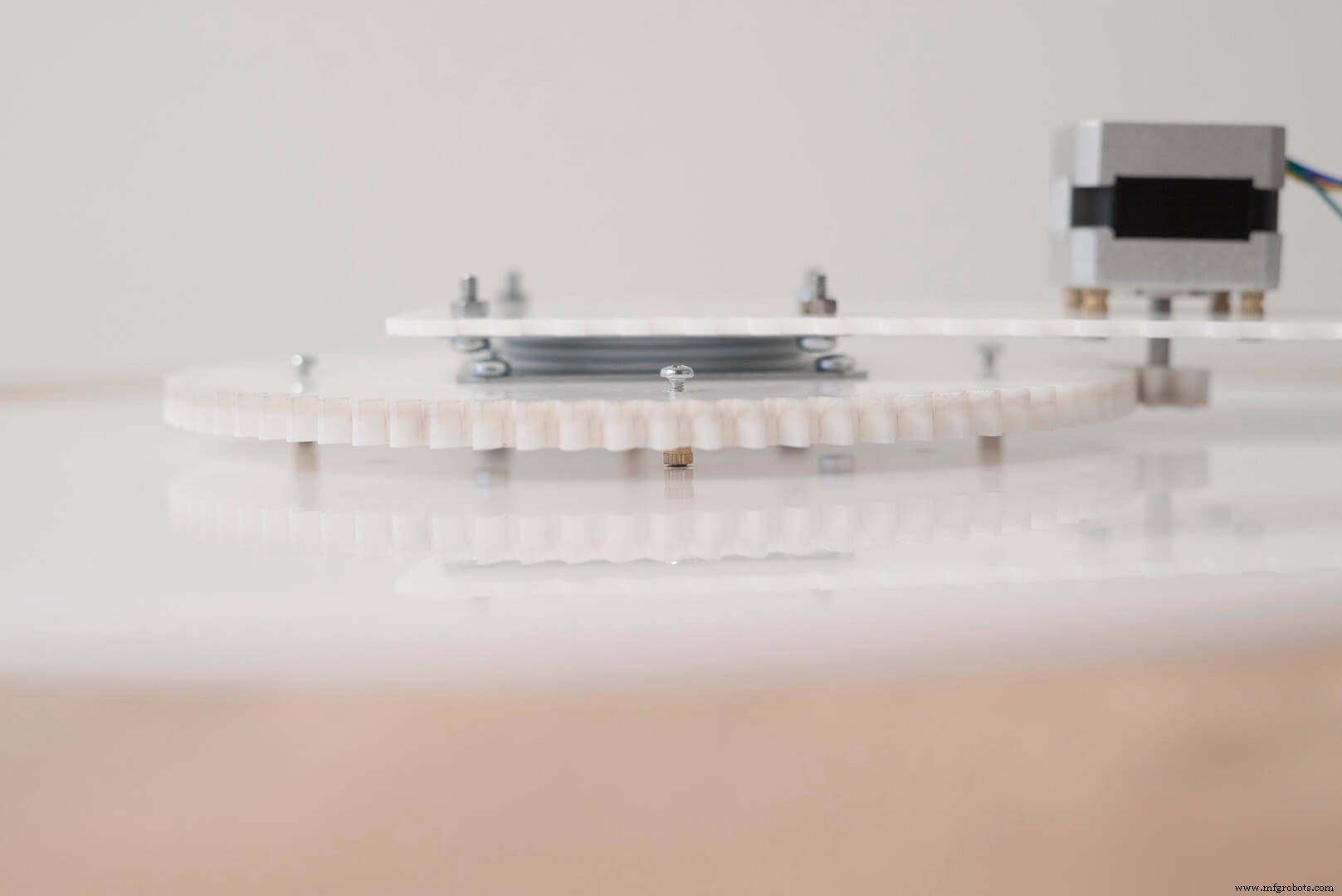 <図>
<図> 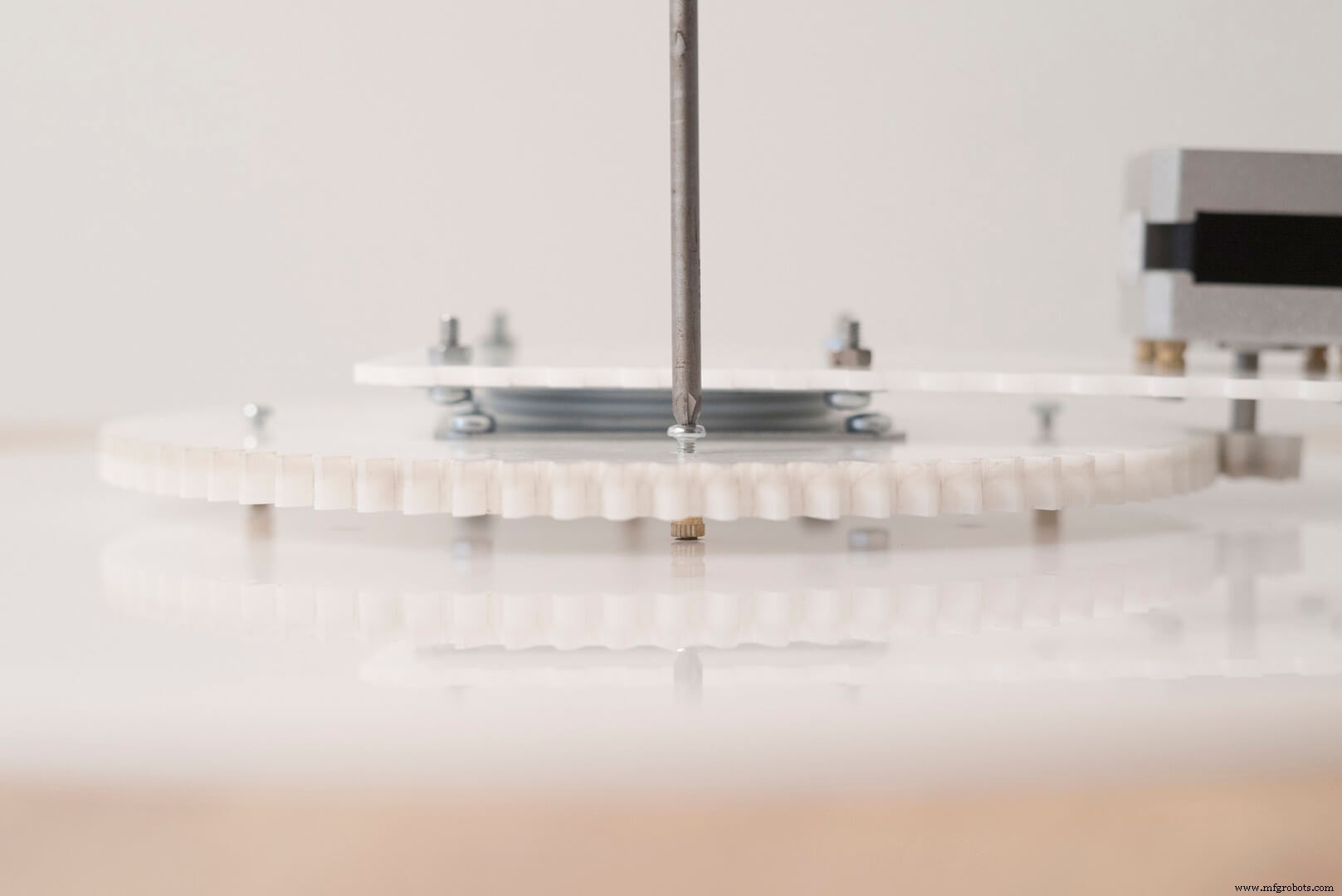 <図>
<図>  <図>
<図> 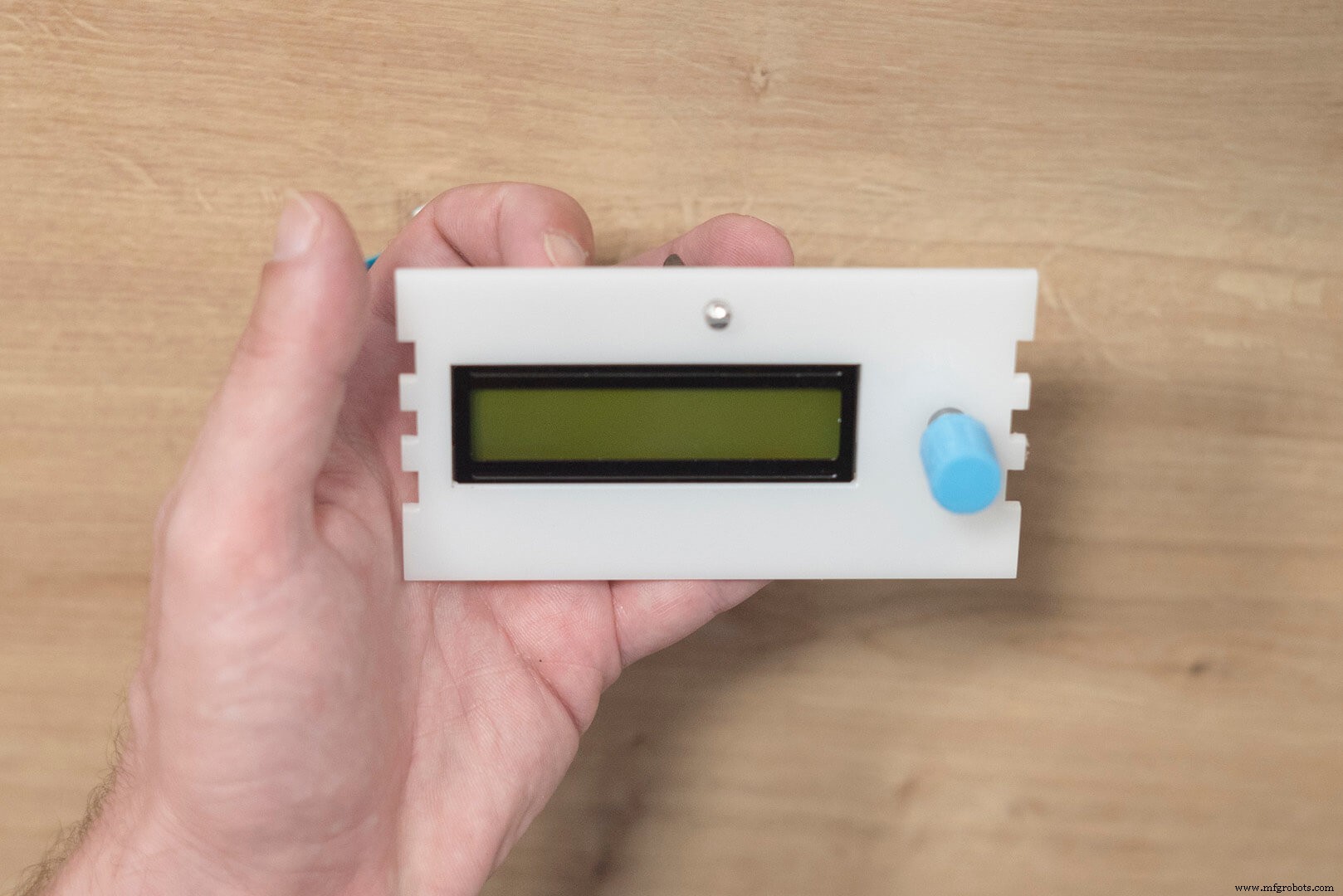 <図>
<図> 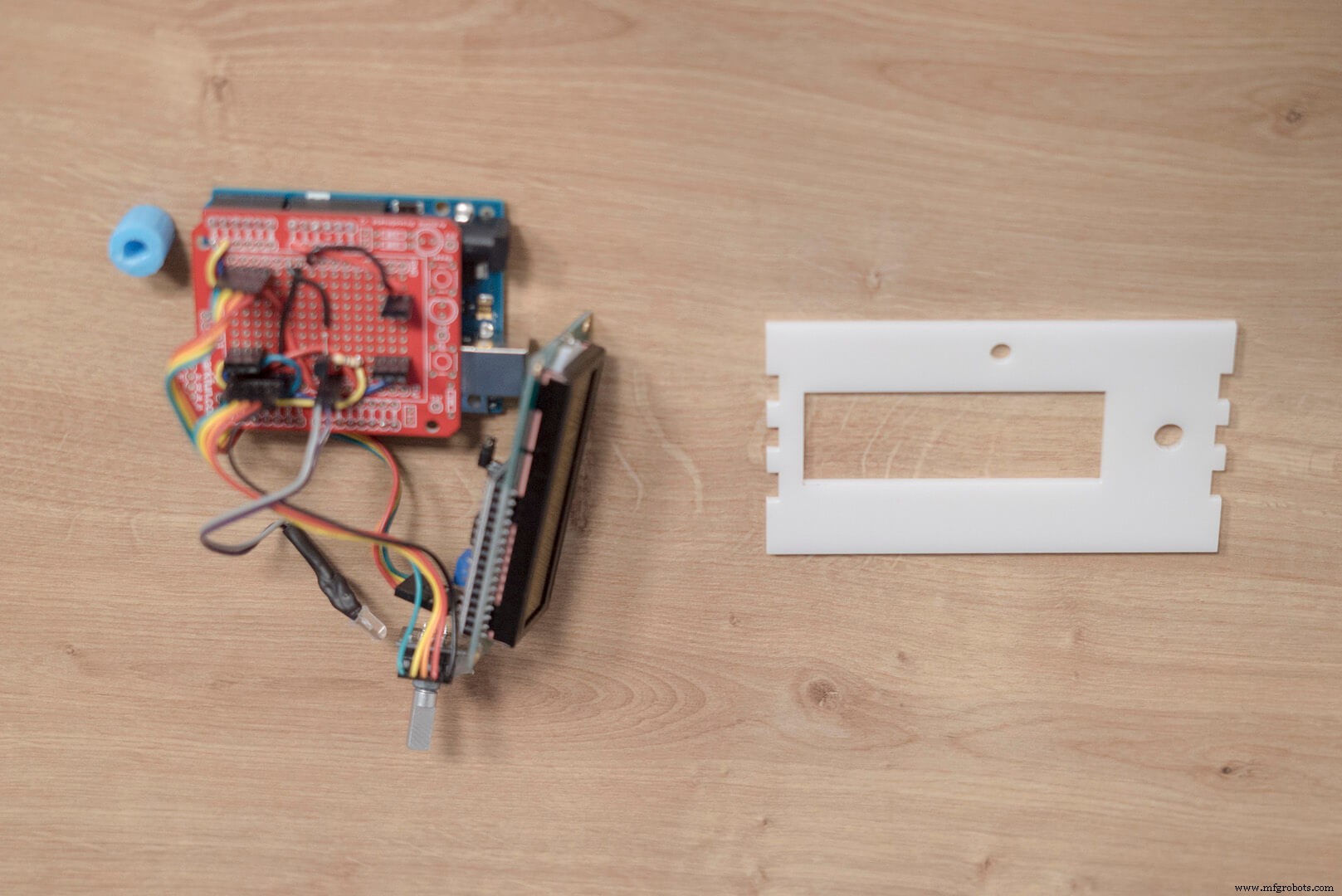 <図>
<図> 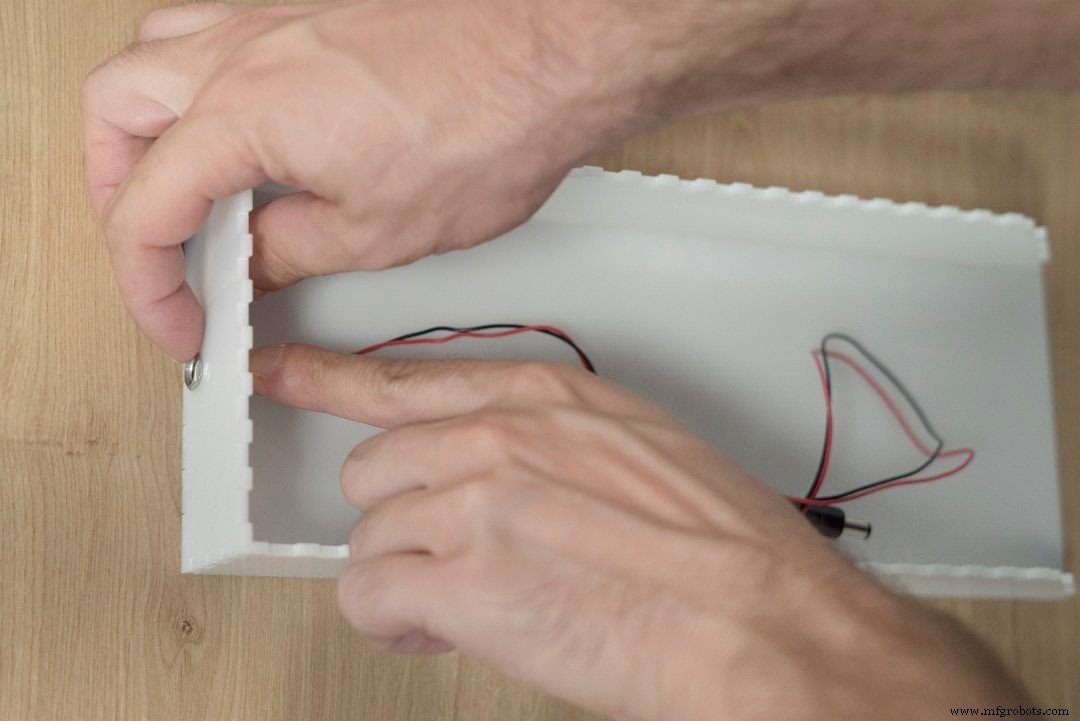 <図>
<図>  <図>
<図>  <図>
<図> 
コード
写真ターンテーブルのコード
https://github.com/Circuito-io/photo-turntableマルチカメラコントロール(IR)
https://github.com/dharmapurikar/Arduino/tree/master/libraries/multiCameraIrControl カスタムパーツとエンクロージャー
プレキシガラスデザインファイル
thingsiverse.comのCADファイルロータリーエンコーダーノブ
thingsiverse.comのCADファイル 回路図
http://bit.ly/photo-turntable-circuit 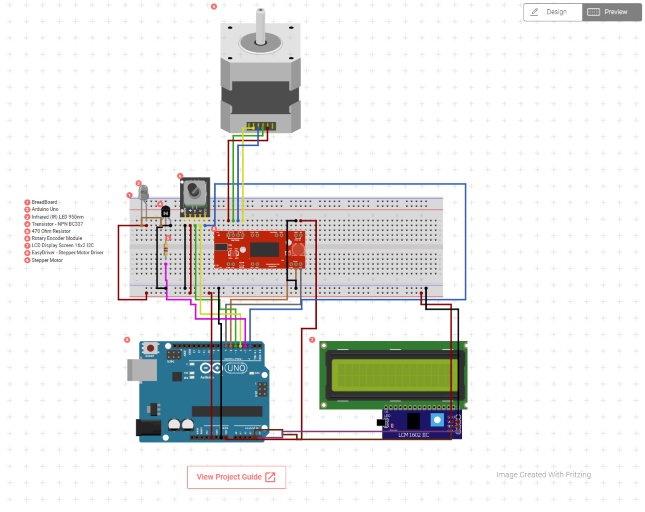
製造プロセス