


音声制御車
コンポーネントと消耗品
>  |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
このプロジェクトについて
コンポーネント:
- Arduino Uno
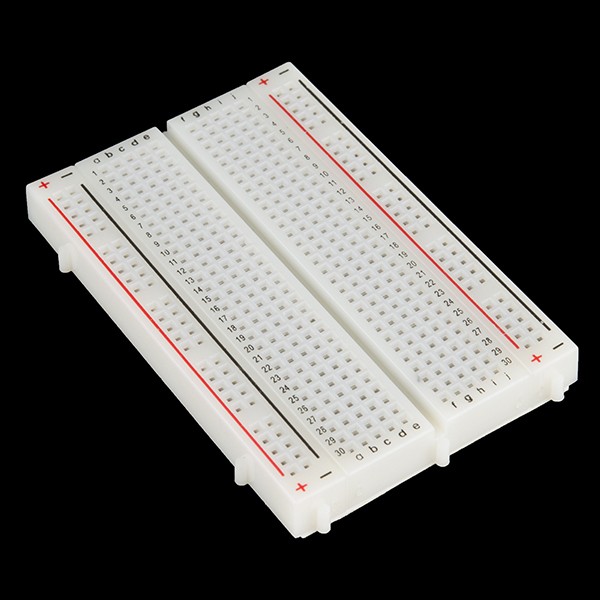
- ブレッドボード
- モーターx2
- ホイールx2
- (適切なサイズの)シャーシ
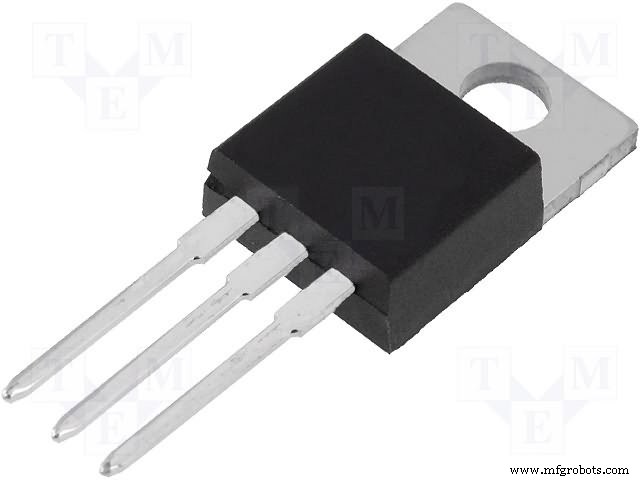
- 電圧レギュレータLM7805
- L293D
- 12Vバッテリー(電源)
- ジャンパー線
- BluetoothモジュールHC-05
アプリはここにあります:https://play.google.com/store/apps/details?id =appinventor.ai_cempehlivan92.Arduino_Sesli_Kontrol
アイデア:
Bluetoothモジュールをモバイルアプリに接続します。完了すると、モバイルを介して提供するコマンドがモジュールを介してArduinoに送信されます。アプリから送信されたシリアルバッファから文字ごとに受け入れ、それらを組み合わせて文字列を形成します。
次に、それをコマンドと比較します。一致する場合、コマンドが実行されます。たとえば、受け取った文字列が「Right」の場合、ボットは右に曲がります。
接続:
ここですべての接続を検索します:https://yainnoware.blogspot.com/p/voice-driven-car.html
コード:
int motor_input1 =11; int motor_input2 =10; int motor_input3 =5; int motor_input4 =6; String voice; void setup(){Serial.begin(9600); pinMode(motor_input1、OUTPUT); //右モーターpinMode(motor_input2、OUTPUT); //右モーターpinMode(motor_input3、OUTPUT); // LEFT MOTOR pinMode(motor_input4、OUTPUT); // LEFT MOTOR} void loop(){while(Serial.available()> 0){delay(10); char c =Serial.read(); if(c =='#'){break; } voice + =c; } if(voice =="forward"){digitalWrite(motor_input1、LOW); digitalWrite(motor_input2、HIGH); digitalWrite(motor_input3、LOW); digitalWrite(motor_input4、HIGH); delay(5000); } else if(voice =="back"){digitalWrite(motor_input1、HIGH); digitalWrite(motor_input2、LOW); digitalWrite(motor_input3、HIGH); digitalWrite(motor_input4、LOW); delay(5000);} else if(voice =="left"){digitalWrite(motor_input1、LOW); digitalWrite(motor_input2、HIGH); digitalWrite(motor_input3、HIGH); digitalWrite(motor_input4、LOW); delay(800); } else if(voice =="right"){digitalWrite(motor_input1、HIGH); digitalWrite(motor_input2、LOW); digitalWrite(motor_input3、LOW); digitalWrite(motor_input4、HIGH); delay(800); } if(voice.length()> 0){Serial.println(voice); voice =""; digitalWrite(motor_input1、LOW); digitalWrite(motor_input2、LOW); digitalWrite(motor_input3、LOW); digitalWrite(motor_input4、LOW); }} 製造プロセス