


ARドローンと1SHEELD-ドローンの周りの世界を発見する
コンポーネントと消耗品
>  |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 |
このプロジェクトについて
私たちのプロジェクトでは、スマートフォンによって記録され、加速度センサー、GPS位置、ノイズドローン、向き、ジャイロスコープなど、PCにリアルタイムで送信されるさまざまな飛行データの制御を確認します。
データ制御には2つのArduinoを使用し、1つはドローンにマウントし、もう1つはコンピューターに、2つのxBeeを使用して1sheeldのリモートデータをPCに通信します。
スマートフォンのすべての機能とセンサーを活用し、素敵な写真を撮る楽しくて簡単な方法;)
コード
- マスターコード
- スレーブ
マスターコード C / C ++
このコードは、ドローン上のArduinoを制御するために、PCに接続されているarduinoにロードされますまず、ライブラリをダウンロードする必要がありますhttps://www.pjrc.com/teensy/td_libs_AltSoftSerial.html
#includeint verifica =0; AltSoftSerial xBee; char c; char h; char stop ='s '; void setup(){Serial.begin(115200); Serial.println( "マスターOK"); Serial.println(); Serial.println( "Digit for:"); Serial.println( "'o'方向センサー値"); Serial.println( "'a'加速度センサー値"); Serial.println( "'b'輝度センサー値"); Serial.println( "'g' GPS位置"); Serial.println( "'m'マイクロフォンノイズ"); Serial.println( "'p'写真を撮る"); xBee.begin(9600);} void loop(){Serial.flush(); if(Serial.available()> 0){c =Serial.read(); if(c =='o' || c =='a' || c =='m' || c =='g' || c =='b' || c =='p'){ // ----------オリエンテーション------------------------------------- ---- if(c =='o'){Serial.println( "Orientament"); c ='1'; xBee.print(c); for(int i =0; i <10; i ++){delay(20); c ='o'; xBee.print(c); do {h =0; h =xBee.read(); Serial.print(h); } while(xBee.available()> 0); delay(100); i =i-1; if(Serial.available()> 0); if(stop ==Serial.read()){Serial.println( "Analysis Stopped"); c ='0'; Serial.println(); Serial.println( "Digit for:"); Serial.println( "'o'方向センサー値"); Serial.println( "'a'加速度センサー値"); Serial.println( "'b'輝度センサー値"); Serial.println( "'g' GPS位置"); Serial.println( "'m'マイクロフォンノイズ"); Serial.println( "'p'写真を撮る"); xBee.print(c); i =11; }}} // ----------加速---------------------------------- ------- if(c =='a'){Serial.println( "Acceleration"); c ='2'; xBee.print(c); for(int i =0; i <10; i ++){delay(20); c ='a'; xBee.print(c); do {h =0; h =xBee.read(); Serial.print(h); } while(xBee.available()> 0); delay(100); i =i-1; if(Serial.available()> 0); if(stop ==Serial.read()){Serial.println( "Analysis Stopped"); c ='0'; Serial.println(); Serial.println( "Digit for:"); Serial.println( "'o'方向センサー値"); Serial.println( "'a'加速度センサー値"); Serial.println( "'b'輝度センサー値"); Serial.println( "'g' GPS位置"); Serial.println( "'m'マイクロフォンノイズ"); Serial.println( "'p'写真を撮る"); xBee.print(c); i =11; }}} // ----------明るさ---------------------------------- ------ if(c =='b'){Serial.println( "Brightness"); c ='3'; xBee.print(c); for(int i =0; i <10; i ++){delay(20); c ='b'; xBee.print(c); do {h =0; h =xBee.read(); Serial.print(h); } while(xBee.available()> 0); delay(50); i =i-1; if(Serial.available()> 0); if(stop ==Serial.read()){Serial.println( "Analysis Stopped"); c ='0'; Serial.println(); Serial.println( "Digit for:"); Serial.println( "'o'方向センサー値"); Serial.println( "'a'加速度センサー値"); Serial.println( "'b'輝度センサー値"); Serial.println( "'g' GPS位置"); Serial.println( "'m'マイクロフォンノイズ"); Serial.println( "'p'写真を撮る"); xBee.print(c); i =11; } } } // - - - - - GPS - - - - - - - - - - - - - - - - - ------- if(c =='g'){Serial.println( "Posizione GPS '"); c ='4'; xBee.print(c); for(int i =0; i <10; i ++){delay(20); c ='g'; xBee.print(c); do {h =0; h =xBee.read(); Serial.print(h); } while(xBee.available()> 0); delay(500); i =i-1; if(Serial.available()> 0); if(stop ==Serial.read()){Serial.println( "Analysis Stopped"); c ='0'; Serial.println(); Serial.println( "Digit for:"); Serial.println( "'o'方向センサー値"); Serial.println( "'a'加速度センサー値"); Serial.println( "'b'輝度センサー値"); Serial.println( "'g' GPS位置"); Serial.println( "'m'マイクロフォンノイズ"); Serial.println( "'p'写真を撮る"); xBee.print(c); i =11; }}} // ---------- MICROFONO ---------------------------------- ------- if(c =='m'){Serial.println( "Microphone"); c ='5'; xBee.print(c); for(int i =0; i <10; i ++){delay(20); c ='m'; xBee.print(c); do {h =0; h =xBee.read(); Serial.print(h); } while(xBee.available()> 0); delay(100); i =i-1; if(Serial.available()> 0); if(stop ==Serial.read()){Serial.println( "Analysis Stopped"); c ='0'; Serial.println(); Serial.println( "Digit for:"); Serial.println( "'o'方向センサー値"); Serial.println( "'a'加速度センサー値"); Serial.println( "'b'輝度センサー値"); Serial.println( "'g' GPS位置"); Serial.println( "'m'マイクロフォンノイズ"); Serial.println( "'p'写真を撮る"); xBee.print(c); i =11; } } } // - - - - - ピクチャー - - - - - - - - - - - - - - - - - ------- if(c =='p'){Serial.println( "写真を撮る"); c ='6'; xBee.print(c); delay(20); c ='p'; Serial.println(); Serial.println( "Digit for:"); Serial.println( "'o'方向センサー値"); Serial.println( "'a'加速度センサー値"); Serial.println( "'b'輝度センサー値"); Serial.println( "'g' GPS位置"); Serial.println( "'m'マイクロフォンノイズ"); Serial.println( "'p'写真を撮る"); xBee.print(c); }}}}
スレーブ C / C ++
このコードは、ドローンにマウントされるsull'arduinoにロードされ、ドローンにデータを提供します。まず、ライブラリhttps://www.pjrc.com/teensy/td_libs_AltSoftSerial.htmlをダウンロードする必要があります
およびhttp://1sheeld.com/downloads/
#include#include char variabile; AltSoftSerial xBee; char master; int voce =0; void setup(){Serial.begin (115200); Serial.println( "Slave ok"); OneSheeld.begin(); xBee.begin(9600);} void loop(){receiveEvent(); requestEvent();} void receiveEvent(){while(xBee.available()> 0){master =xBee.read(); variabile =master; }} void requestEvent(){if(variabile =='o'){xBee.print( "Asse x:"); xBee.print(OrientationSensor.getX()); xBee.print( "Asse y:"); xBee.print(OrientationSensor.getY()); xBee.print( "Asse z:"); xBee.println(OrientationSensor.getZ());変数=0; } if(variabile =='a'){xBee.print( "Asse x:"); xBee.print(AccelerometerSensor.getX()); xBee.print( "Asse y:"); xBee.print(AccelerometerSensor.getX()); xBee.print( "Asse z:"); xBee.println(AccelerometerSensor.getX());変数=0; } if(variabile =='g'){xBee.print( "Longitudine:"); xBee.print(GPS.getLongitude()); xBee.print( "Latitudine;:"); xBee.println(GPS.getLatitude());変数=0; } if(variabile =='m'){xBee.print( "db:"); xBee.println(Mic.getValue());変数=0; } if(variabile =='b'){xBee.print( "Lumen:"); xBee.println(LightSensor.getValue());変数=0; } if(variabile =='p'){Camera.setFlash(ON); Camera.rearCapture(); xBee.println( "撮影した写真");変数=0; } if(variabile =='1'){TextToSpeech.say( "分析方向");変数=0; } if(variabile =='2'){TextToSpeech.say( "分析アクセラレーション");変数=0; } if(variabile =='3'){TextToSpeech.say( "分析輝度強度");変数=0; } if(variabile =='4'){TextToSpeech.say( "analysis GPS position");変数=0; } if(variabile =='5'){TextToSpeech.say( "analysis decibel noise");変数=0; } if(variabile =='6'){TextToSpeech.say( "写真を撮る");変数=0; } if(variabile =='0'){TextToSpeech.say( "分析が停止しました");変数=0; }}
回路図
これは、Arduinoとxbeeの間の接続であり、コンピューターに接続するArduinoとドローン上のArduinoについても同じです。 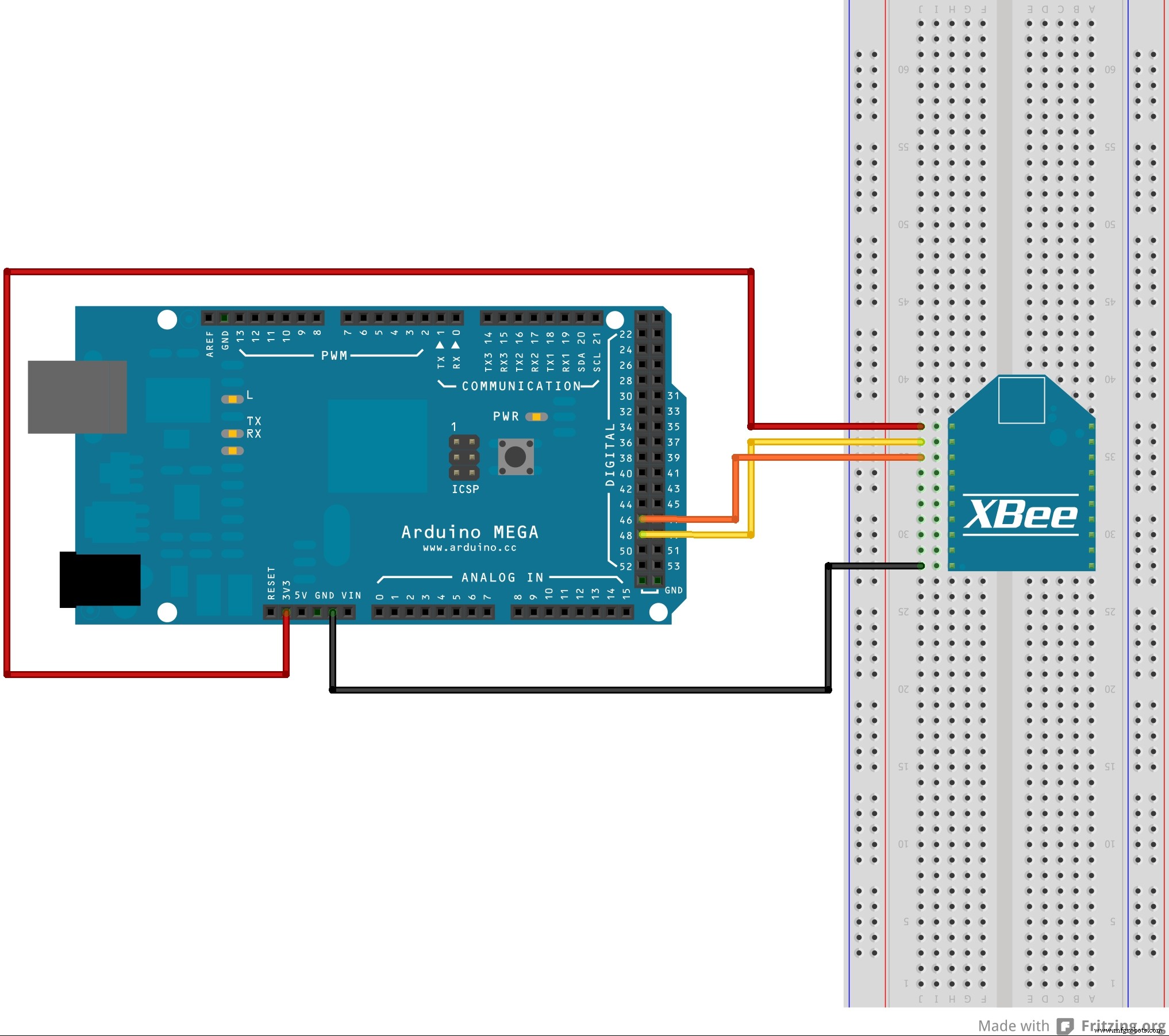
製造プロセス