


ケーススタディ:アディティブ マニュファクチャリング ワークフローの改善
ソフトウェア ワークフローを改善することで、3D プリント プロセスの重要な時間を短縮できます。研究者が RoboDK を使用して積層造形ワークフローをどのように改善したかを次に示します。
ロボットを使用して 3D プリントを行う場合、ソフトウェア ワークフローが生産性に重要な影響を与える可能性があります。ワークフローを数分でも短縮できれば、時間の経過とともに生産性が大幅に向上する可能性があります。
通常、異なるソフトウェア パッケージを切り替えるのにかかる時間は短いですが、ワークフローがスムーズにいかなくなり、その結果、アディティブ マニュファクチャリングの効率が低下する可能性があります。
最近、ポルトガルとノルウェーの研究者が、RoboDK API を介して RoboDK の積層造形ワークフローをさらに合理化するアプリケーションを開発しました。
研究者紹介
このエンジニアリング アプリケーションは、ポルトガルのコインブラ大学の Filipe Monteiro Ribeiro 氏と J. Norberto Pires 氏、およびノルウェーの主要な製造研究センターである SINTEF の Amin S. Azar 氏による研究のために開発されました。
「アディティブ マニュファクチャリング アプリケーションのためのロボット制御アーキテクチャの実装」というタイトルの研究 今年初めに産業用ロボット誌に掲載されました。
研究者は何を達成しようとしていましたか?
RoboDK は、アディティブ マニュファクチャリングにロボティクスを追加する優れた方法です。 3D プリントされたコンクリート構造物、3D プリントされたアート、3D プリントされた食品など、さまざまなオブジェクトのプリントに人々がそれを使用しているのをすでに見てきました。
3D プリントのワークフローは RoboDK で既に非常に優れています。スライサー ソフトウェア (通常はオープン ソースの Slic3r) で GCODE を生成し、結果のパスを RoboDK にロードするだけです。
ただし、研究者チームは、RoboDK だけでは可能な限り最も合理化されたワークフローを提供できないことを確認しました。彼らの研究では、2 つのプログラム間で G コード ファイルを手動で移動することなく、RoboDK と Slic3r の機能を直接組み合わせるために開発したプログラムの概要が説明されています。
これを実現するために、チームは Python と RoboDK API を使用してグラフィカル プログラムを開発しました。
この調査の目標は次のとおりです。
- アディティブ マニュファクチャリング シミュレーションを開発するには — これは、ロボット シミュレーション用の直感的な環境を提供する RoboDK を使用すると特に簡単です。チームはまた、3D プリント素材の堆積をシミュレートするための簡単な Python プログラムも追加しました。これは現在、RoboDK 自体がシミュレートしているものではないためです。
- ロボットのオフライン シミュレーションを可能にする — 研究者によると、仮想環境を使用することで実際のロボットへの損傷のリスクが軽減されるため、これは彼らのアプリケーションの重要な部分でした。 RoboDK では、シミュレートされたロボット プログラムを多数のポストプロセッサを介して実際のロボットのコードに変換することが非常に簡単になります。
- 非同期操作 — チームにとって、作成したプログラムが RoboDK でシミュレートされたロボットの動作を妨げないことが重要でした。たとえば、プログラムが新しいモデルを Slic3r にロードしている間、シミュレーションは実行を継続する必要があります。これは、RoboDK と任意の Python プログラム間の非同期リンクを提供する robolink Python モジュールを使用して簡単に実現できます。
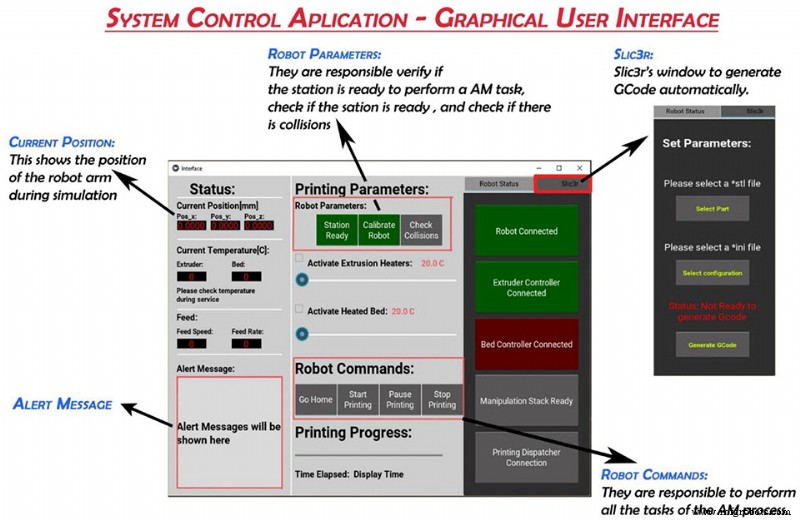
結果として得られるプログラムは、Slic3r と RoboDK の間に位置し、積層造形プロセスを調整します。
研究は何を実証しましたか?
チームのアプリケーションは、RoboDK の機能を非常にうまく活用していました。特に、API を使用して独自のワークフローの一部を組み合わせることがいかに効果的であるかを実証しました。
RoboDK API は RoboDK の非常に強力な部分ですが、多くのユーザーは使用していません。これは、ロボット プログラミング ワークフローの円滑性を大幅に改善するのに役立つ可能性があるため、残念です。いくつかのプログラミング言語をサポートしていますが、研究者が使用した Python ライブラリは特に使いやすいです — もちろん、Python プログラミング言語が好きだと仮定すると (そして、そうしない理由はありませんか? それはとても簡単な言語です!)。
非同期操作の利点
調査の重要な側面の 1 つは、非同期操作でした。チームにとって、プログラムのどの部分もプログラムの別の部分の動作を停止しないようにすることが重要でした。
RoboDK はすでに非同期で実行されています — 複数の Python スクリプトを同時に実行でき、それらが互いに干渉することはありません — しかし、チームは独自のプログラムにこの非同期機能も持たせる必要がありました.
たとえば、Slic3r が GCODE の生成を完了するのを待っているときに、プログラムが「ハング」することを望んでいませんでした。プログラムが他のことをしている間に、ロボットを制御できる必要がありました。彼らは asyncio でこれを達成しました 並行プログラミングの一般的なオプションである Python 用のライブラリです。
API を使用して独自のワークフローを改善する方法
この調査はロボット工学の研究者によって行われましたが、これは RoboDK API を使用したプログラミングが複雑であることを意味するとは考えないでください。プログラミングの達人でなくても、API を自分で簡単に使用できます。
ワークフローを促進する独自のプログラムを開発したい場合は、次の手順に従ってください:
<オール>もちろん、ワークフローを改善するために独自のコードを記述する必要はありません。また、SolidWorks などのプログラムに RoboDK プラグインを使用することもできます。これにより、他のプログラムを RoboDK と組み合わせて使用する場合のワークフローも合理化されます。
しかし、研究者チームが示したように、API は、まだプラグインを持っていないソフトウェアのワークフローのさまざまな部分をスムーズにするのに非常に効果的です.
プログラミング プロセスを数分短縮するだけでも、長期的には生産性が向上する可能性があることを忘れないでください。
プロセスで API を使用することで何が実現できますか? 以下のコメントでお知らせいただくか、 のディスカッションに参加してください LinkedIn 、 ツイッター 、 フェイスブック、 インスタグラム または RoboDK フォーラム .
産業用ロボット
- 3Dプリンティングとアディティブマニュファクチャリング:違いは何ですか?
- 自動車産業における積層造形の価値
- スペアパーツ生産における積層造形実行システムのビジネスケースは何ですか?
- アディティブマニュファクチャリングにおける真のハイブリッドプロセスへの移行
- ハイブリッド製造技術はアディティブマニュファクチャリングの未来ですか?
- デジタルスレッドの接続:MES /ワークフローソフトウェアを使用した積層造形のスケーリング
- 5つのトレンドがアディティブマニュファクチャリングの未来を形作る[2021]
- アメリカの製造業を家に持ち帰る場合
- 製造業における3Dプリントの事例
- アディティブマニュファクチャリングが工業生産に与える影響
- アディティブ マニュファクチャリングの主な種類