


ハンドメイド製品をロボットで自動化?
ハンドメイド製品を自動化することはできますか?
手作りの製品について考えるとき、各作品が必然的にユニークである、非常に複雑な特注品を想像することがよくあります。ただし、完全な自動化を保証できるほど生産数が多くないという理由だけで、多くの製品は手作りです。
このケース スタディでは、工業用プラスチックの研究者グループが、ロボットと RoboDK を使用して少量の製造プロセスを自動化した方法を紹介します。
多くの形式の自動化の問題は、高スループットで一貫したプロセスを実行する必要があることです。これがなければ、投資収益率を達成できるという確信が持てないため、自動化に投資しても意味がないことがよくあります。
小規模なバッチ プロジェクトがある場合、自動化さえ可能かどうか疑問に思うかもしれません。
これは、工業用プラスチックの研究者グループが最新のロボット工学プロジェクトで取り組んだ問題です。彼らは、プラスチック製のフラフープ玩具の組み立てを自動化する、小さくて費用対効果の高い方法を探していました。
紹介… ATS2i
フランスの会社「Applications Thermoplastiques et Solutions Industrielles Innovantes」(ATS2i)の研究者がこのプロジェクトを実行しました。 15 年以上にわたって工業用プラスチックに携わってきたエンジニアの Alexandre Temporel が率いていました。
同社は、革新的な産業プロジェクトの設計とエンジニアリングを専門としており、プラスチック産業に特化した専門知識を持っています。 3D プリント、機械加工、CNC など、さまざまな製造技術が組み込まれています。

ATS2i は、研究開発や実現可能性調査から設計やプロトタイピングまで、産業プロジェクトのライフ サイクル全体にわたってプロジェクトを検討します。
企業としての範囲の一部は、他の人が高度な自動化を通じて既存の産業機械を近代化するのを支援することです.
ここで、彼らのフラフープ ロボット プロジェクトの出番です。
プロジェクト:フラフープ制作
問題のプロジェクトには、プラスチック製のフラフープ玩具の製造が含まれていました。これは、小さなバッチ サイズが必要な多くの状況で、通常手作業で実行されるタスクの良い例です。
ATS2i のチームは、ロボット工学を使用してフラフープ生産の組み立て段階を簡単に自動化できるかどうかを確認するためのテストとしてセットアップを作成しました。
フラフープとは?
フラフープのおもちゃに慣れていない場合は、こちらの入門書をご覧ください…
フラフープは、2,500 年以上にわたっておもちゃとして使用されてきました。フープを使用するには、腰、手足、または首に巻き付けます。子供はゲームに、大人は運動や娯楽の一形態としてそれらを使用します。フラフープには長い歴史がありますが、1950 年代に人気が急上昇しました。
現代のフラフープのほとんどは、伝統的に柳、竹、または硬い草で作られていましたが、プラスチックチューブで作られています.

フラフープ製造の複雑さ
エンジニアリングの一環として、フラフープは非常に簡単に作ることができます。プラスチック製のチューブを円形に曲げ、通常は両頭ダボ プラグを挿入して両端を接続します。
製造は簡単ですが、フラフープは常に大量に製造されるわけではありません。大量生産されたバージョンとは異なり、小さな職人のメーカーは小さなバッチでそれらを生産します.
フープの両端を接続するタスクは、自動化の良い候補です。
これは、プラスチック製造の他の分野でしばしば必要とされるタスクの好例です。
ロボットの応用:フラフープの組み立て
チームのプロジェクトには、協働ロボットの簡単な使用が含まれていました。その結果、チームは、フェンスや安全センサーなどの追加の安全対策を必要とせずに、ワークショップでタスクを実行しました.
セットアップと製造プロセスはかなり簡単でした。

ロボットのセットアップ
設定は次のとおりです:
- Universal Robots UR5 協働ロボット。
- OnRobot グリッパー。
- ロボット プログラミング用の RoboDK。
- プラスチック チューブを曲げるためのロール ベンダー治具。
チームはこれらのコンポーネントを 1 つのロボット セルに統合し、テーブルトップと同じくらいのスペースしか占有しませんでした。
製造工程
フラフープを作成するプロセスには、マシン テンディング (ロール ベンダーのテンディング) と組み立ての側面が含まれていました。
手順は次のとおりです:
<オール>
RoboDK を使用したロボットのプログラミング
Alexandre Temporel と彼のチームは、RoboDK を使用してロボットをプログラミングすることにしました。このソフトウェアはすぐに使用できる UR ロボットと互換性があり、このようなタスクに役立ちます。
彼らは最初にソフトウェア内でセットアップを作成しました。 3D モデルを簡単に追加できる RoboDK の機能により、ロール ベンダーのモデルも追加できました。これにより、ロボットを機械と正確に位置合わせすることが容易になりました。
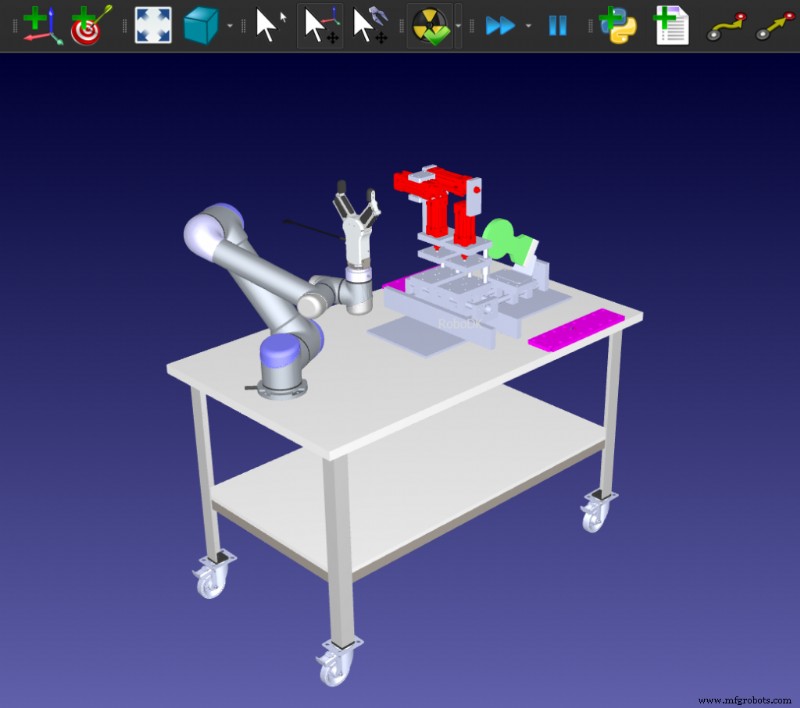
プラスチック チューブの柔軟な性質を考えると、ソフトウェアでフラフープをシミュレートしないことが理にかなっているという結論に達しました。シミュレーションが複雑になるだけで、優れたプログラムを作成するのに不必要でした。
このビデオで彼らの作業の結果を見ることができます:
ここから自分のアプリケーションに教訓を引き出す方法
プロセスにロボティクスを利用する方法はたくさんあります。すべてを自動化する必要はありません。
この ATS2i のケース スタディは、展開が容易で、小規模バッチ製造の反復タスクを軽減するアプリケーションの良い例です。
ロボットは、人間が同じ状況で行うのと同じ仕事 (ロール ベンダーの手入れなど) を行っているため、製品は本質的に手作りのままであると主張することさえできます。
自動化したい小規模なバッチ タスクはどれですか? 以下のコメント欄でお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、または RoboDK フォーラムでのディスカッションにご参加ください。
産業用ロボット
- ガントリーロボット:最大のアプリケーションを自動化
- ウェビナー:TechmanRobotを使用してプロセスを自動化する
- BobCAD-CAM プラグインによる簡単なロボット加工
- FANUC ロボットでオフラインプログラミングを使用するための 5 つのステップ
- RoboDK による無料のロボット トレーニング
- ロボットでできる 10 の驚くべき製品パーソナライゼーション
- ハンドメイド製品をロボットで自動化?
- 安川ロボットプログラミング入門
- RoboDK を使用してピック アンド プレース ロボットをプログラミングする
- 2022 年にロボティクスで自動化する新しい方法
- ロボット トレーニングで会社の誠実さを維持する