


ロボットポジショナーに必要な軸数は?
ロボット ポジショナーが必要であると判断しましたが、軸はいくつ必要ですか?
非常に多くの異なるスタイルを持つ非常に多くのモデルのポジショナーがあります。単純な軸が 1 つあるものもあれば、多数あるものもあります!
さらに紛らわしいのは、ポジショナーが持つことができる構成の範囲です。軸は、垂直、水平、およびその間の任意の角度で取り付けることができます。
軸が多すぎたり少なすぎたりするポジショナーを選択すると、予算が無駄になる可能性があります。しかし、多すぎます!?
ロボット ポジショナーを検討している場合は、おそらくすでにいくつかの異なるモデルを見たことがあるでしょう。 1 軸のターンテーブル、2 軸のポジショナー、多軸の観覧車を見たことがあるでしょう。さまざまなブランド、スタイル、価格帯を調べたことがあるでしょう。
正直なところ、ポジショナーに少しうんざりし始めているかもしれません。
ポジショナーの問題点は、「これを買います」と言ってそのままにしておくという単純なケースではないということです。選択するポジショナーは、ロボットセルの統合とプログラミングの容易さに影響します。間違ったものを選んで、ロボットの展開とプログラミングに必要以上に苦労したくはありません。
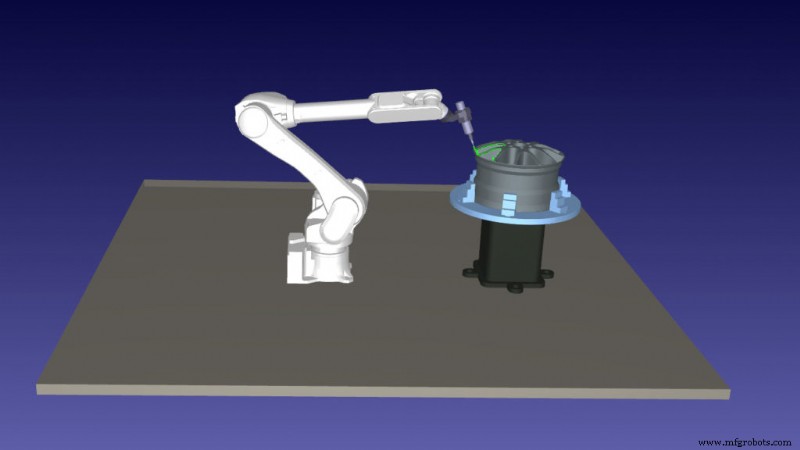
たとえば、6 軸ロボットを備えた 5 軸ポジショナーを入手する場合、制御する必要があるのは 11 軸です!それだけの数の軸が必要な場合は、問題ありません。ただし、必要がなければ、購入を後悔する可能性があります。
なぜ「軸はいくつ?」紛らわしい質問です
メカニズムに必要な軸の数を尋ねるのは、非常に自然な質問です。ただし、満足のいく回答をするのは難しい質問です。
産業用ロボットだけについて話すとき、一般的な答えは、6 軸ロボットが必要であるということです。これは常に正しいとは限りませんが、ほとんどの場合は正しいです。その理由は、任意の位置と方向からロボットのワークスペース内のポイントに到達するには 6 つの軸が必要だからです。
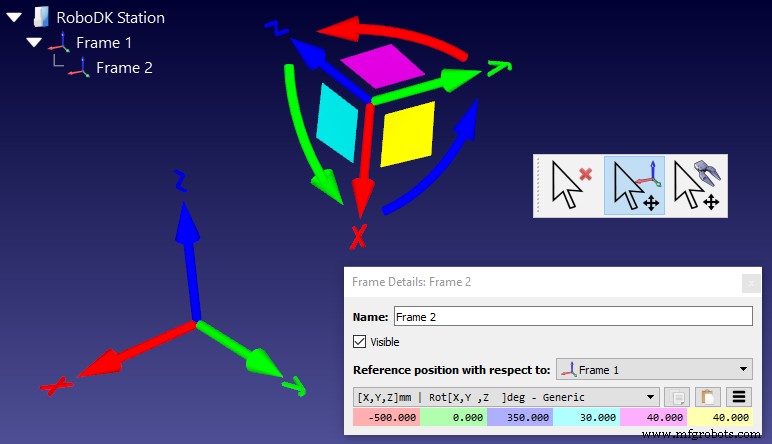
オイラー角入門で説明したように、ロボットのエンド エフェクタの位置は 6 つのパラメータで制御されます。3 つの並進パラメータ (X、Y、Z) と 3 つの回転パラメータ (Rot[X]、Rot[Y]、Rot) です。 [Z]).
ロボットの軸が 6 軸未満の場合、ロボットの柔軟性が制限されます。これは、一部のロボットにとって理にかなっています。対象物に上からアプローチするだけのパレタイジングロボット。ただし、一般的に、6 軸の産業用ロボットは、幅広いタスクに最も役立ちます。
ただし、6 軸を超えると、メカニズムは「冗長」になります。
たとえば、7 軸ロボットは、6-DoF ロボットと同じワークスペース内のポイントに到達できます。ただし、冗長機構の制御はより複雑になります。結果として、不要な DoF を追加する必要はありません。
ポジショナーを追加するということは、ロボットの自由度を増やすことを意味します。これにより、システムが冗長になる場合とそうでない場合があります。
追加の DoF が必要かどうかは、タスクの特定のニーズによって異なります。
用途に必要な軸数を特定するための 7 つのステップ
必要な軸数を特定する方法は、アプリケーションの要件をより詳しく調べることです。
これは、あなたのために働く可能性のある潜在的なポジショナーを特定するために使用できるプロセスです.いくつかの潜在的なモデルを拡大して、適切に評価することができます。これらのオプションのいずれも適切でない場合は、もう一度ズームアウトして、学習した情報を使用してより適切なポジショナーを選択できます。
<オール>このようなプロセスを使用すると、適切な数の軸を特定する際の当て推量の一部が取り除かれます。シミュレーションの各テストで、タスクを完了するためにポジショナーから本当に必要なものについて少しずつ学びます。
選択し、それに取り組む
タスクに適したモデルに照準を合わせたら、次に進み、シミュレーターでより徹底的にアプリケーションを開発できます。

保存したプロジェクトを選択したポジショナーで開き、完全なアプリケーションに調整します。これにより、タスクのすべての側面をテストし、簡単に統合できるようにアプリケーションを準備できます。
ポジショナーを購入した後は、より多くの軸がタスクに役立つかどうかを心配する必要はありません。ロボットは非常に柔軟で、通常、1 つのロボットで同じアクションを実行する方法が複数あります。
ロボットを配備する際に問題が発生した場合、お持ちの機器を使用してほぼ確実に解決策を見つけることができます。これは、シミュレーターをテストベンチとして使用して購入の選択を行うことの価値です。
どのタイプのポジショナーを検討していますか? 以下のコメントでお知らせいただくか、LinkedIn、Twitter、Facebook、Instagram、または RoboDK フォーラムでのディスカッションに参加してください。
産業用ロボット
- ロボットはどのようにして完全な自律性に到達しますか?
- あなたの資産追跡システムはどれくらい正確である必要がありますか?
- ニューラルネットワークにはいくつの隠しレイヤーと隠しノードが必要ですか?
- ホワイトペーパー:ロボットの可能性を見つける方法
- ロボット工学を施設にうまく統合する方法
- ロボット自動化の費用はいくらですか?
- 仮想ソリューションセンター:ロボットシミュレーションはロボット統合にどのように役立ちますか?
- ロボット機械の傾向は、時間の経過とともにどのようにROIを実現しますか?
- 業務でロボット溶接の安全性を促進する方法
- ロボットを購入する時期を知るにはどうすればよいですか?
- 油圧ポンプに必要な HP は?