


ドローンの電子速度制御を設計する際の重要な要素
ドローンの設計の鍵は、モーターの速度と回転を制御する機能です。ほとんどのドローンはブラシレスDCモーターで駆動され、速度と回転方向を一定に調整する必要があります。電子速度制御(ESC)モジュールはこれらの機能を実行し、電源ステージ、電流検出回路、マイクロコントローラー、および飛行制御システムとの通信インターフェースを備えているため、ドローンの基本となります。この記事では、ESCを設計する際に考慮すべき重要な要素と、市場の開発ソリューションについて説明します。
モーターコントロール
ESCの設計には、次のように要約できる特性の注意深い評価と分析が必要です。
- ドローンに取り付けられたバッテリー
- モーター
- 利用可能な予算
- 電磁両立性(EMC)と干渉耐性
ドローンには、ブラシレス直流モーター(BLDC)とブラシレス交流モーター(BLAC)の2種類のブラシレスモーターを取り付けることができます。これは、永久磁石同期モーター(PMSM)とも呼ばれます。使用するモーターのタイプの選択は、選択した制御アルゴリズムに影響されます。制御アルゴリズムは、台形制御またはフィールド指向制御(FOC)のいずれかです。台形モーター制御アルゴリズムには、次の主な特徴があります。
- 6相スイッチングシーケンスに基づくモーター制御
- 正しい角度を設定するために使用される、ローターの磁気角度の検出。各ステップは60°の角度に対応します
- センサーレス制御システムでは、スイッチング角度は逆起電力相電圧を測定することによって推定されます
一方、FOC制御アルゴリズムには、次の機能があります。
- 正弦波相の電圧または電流(FOC)によるモーター制御
- 1°から5°の最小精度でのローター角度検出。これにより、アルゴリズムが常に最大トルクを提供できるようになります。
センサーレス制御システムでは、モーターの磁気角度はモーターの相電圧と電流から推定されます。その位置は、追加のセンサーを使用せずに、モーターの特定の電気的パラメーターを監視することによって決定されます。ドローンで使用される最も一般的なタイプは、サイズが小さく、コストが比較的低く、耐久性と堅牢性が高いブラシレスDCモーターです。
ほとんどのドローンには少なくとも4つのモーターがあり、4モーターバージョンが最も使用されています。 ESCは各モーター速度の制御を担当するため、最も一般的なドローンアーキテクチャでは、各モーターにESCを専用に使用します。すべてのESCは、ドローンを簡単に制御できるように、フライトコントローラーを介して直接または間接的に相互に通信できる必要があります。各モーターの回転方向も重要です。クワッドコプターでは、1対のモーターが一方向に回転し、もう一方のペアは反対方向に回転します。
ESCメーカーで最も一般的に使用されているモーター制御技術は、モーターのトルクと速度を制御する技術であるフィールド指向制御です。正しく実装されている場合、FOCは不安定さを発生させることなく急激な加速度の変化にも対応できるため、ドローンは効率を最大化しながら複雑な操作を実行できます。
以下の図1のブロック図は、次のコンポーネントを含むFOCアーキテクチャを示しています。
- 2つの一体型比例コントローラーで構成される電流コントローラー
- オプションの外部ループ速度コントローラーと基準電流ジェネレーター
- 固定から回転の同期フレームに変換するためのClarke、Park、およびinversePark変換
- vαおよびvβコマンドを固定子巻線に適用されるパルス幅変調信号に変換する空間ベクトル変調アルゴリズム
- 起動およびシャットダウンロジックを含む保護および補助機能
- センサーレス制御が必要な場合にローターの角度位置を推定するためのオプションのオブザーバー
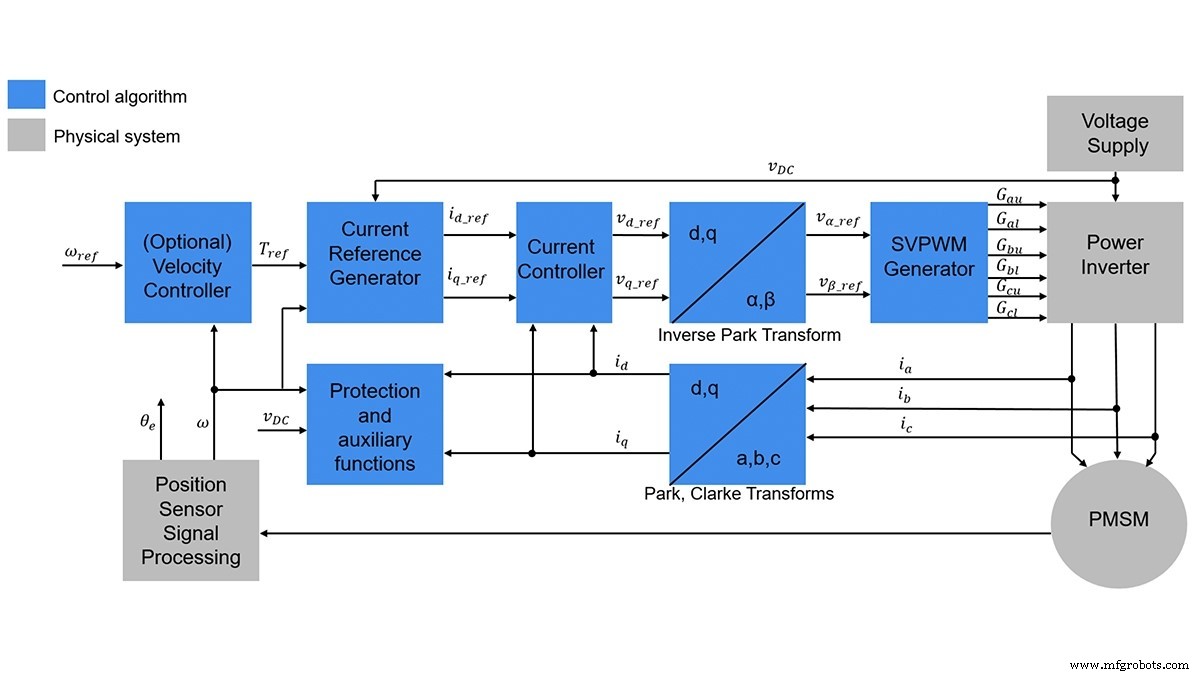
図1.フィールド指向制御のブロック図(出典:Mathworks)
FOCを設計するモーター制御エンジニアは、電流ループ用に2つのPIコントローラーを備えたコントローラーアーキテクチャの開発、パフォーマンス要件を満たすためのすべてのPIコントローラーのゲインの最適化、PWMを制御するための空間ベクトル変調器の設計などのいくつかのタスクを実行します。
制御アルゴリズム(台形またはFOC)が選択されたら、次のステップは開ループまたは閉ループ制御システムのいずれかを選択することです。開ループ制御では、同期モーター(BLDCまたはBLAC)は制御信号を介して駆動され、コマンドされた制御アクションに従うと想定されます。閉ループ制御システムでは、回路はモーターが意図したとおりに動いているかどうかをチェックできます。そうでない場合、制御システムは、電流を増減することにより、動きの過不足を自動的に補正します。
閉ループまたは開ループ(センサーレス)制御システムを使用する場合、フィードバック信号として使用するには、電流と電圧を測定する必要があります。図2は、台形と正弦波の両方の制御システムに適した一般的な測定セットアップを示しています。センサーレスアルゴリズムで台形制御を使用することにより、センサーレスアルゴリズムで三相電圧を使用してローター角度を計算します。
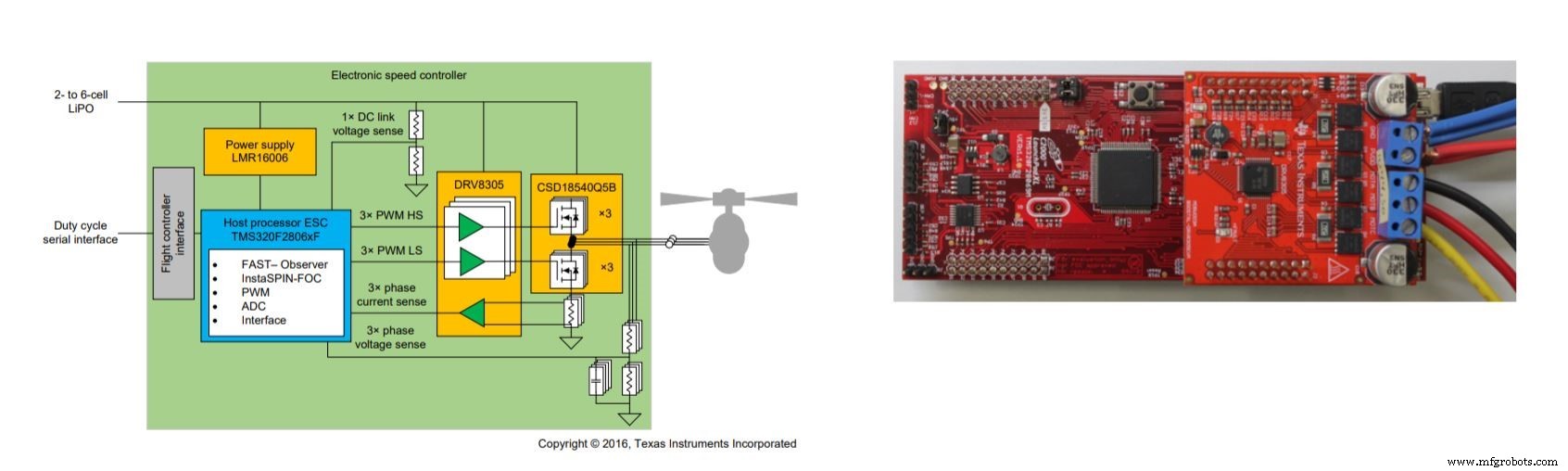
図2.センサーレスモーター制御を備えたESC。右側はTexasInstrumentsによるドローンESCの高速センサーレスFOCリファレンスデザインであり、左側はそのブロック図です。 (出典:Texas Instruments)
クワッドコプターダイナミクス
ドローンの機械的な単純さと空力的安定性は、モーターとその操作の協調的な使用に関連しています。クワッドコプターでは、構造の対角線上に配置されたモーターのペアは、他の2つのモーターと同じ方向に回転しますが、反対方向に回転します。 4つのモーターすべてが同じ速度で回転する場合、ドローンは上昇、下降、または水平飛行を続けることができます。対角線のペアが他のペアよりも速く回転する場合、ドローンはその重心を中心に回転し、同じ水平面に留まります(図3)。
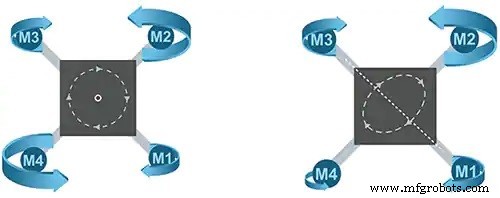
図3.ドローンは、ローター速度のさまざまな組み合わせを使用して操縦を実行します。 (出典:STMicroelectronics)
ヘッド(またはテール)ローターの速度を変更すると、固定翼航空機が降下するように、ドローンが上向きまたは下向きになります。左または右のトルク調整により、ドローンが回転し、その軸を中心に回転します。目的の操縦を完了するために必要な飛行高度を達成するために適切なローターの速度を変更するのは、ドローンの飛行制御システム次第です。
制御エンジニアにとって、速度補正は、比例、積分、微分(PID)コントローラーで解決される一般的な制御ループフィードバックの問題です。
ESCの設計
ドローン用のESCを設計するには、高RPMモーター(12,000 + RPM)を制御するために特別に設計された高品質のコンポーネントが必要です。 Texas Instrumentsは、三相モーター制御アプリケーションの設計を簡素化するInstaSPINと呼ばれるMCUファミリーを開発しました。センサーレスシステムに適したInstaSPIN-FOCは、あらゆる3相モーターに適したトルクと速度の制御を備えた高速ソフトウェアエンコーダーを備えています。 InstaSPIN-MOTIONはセンサーレスシステムを対象としており、三相モーターの位置、速度、トルクを制御します。
これらのスコープの完全なリファレンスデザインはTIによって提供され、InstaSPIN-FOCおよびInstaSPIN-MOTIONモーター制御テクノロジーで構成されています。プラットフォームには、32ビットのTI C2000InstaSPINマイクロコントローラーが含まれています。開発者は、三相モーターを識別、自動調整、および制御できるため、安定した機能的なモーター制御システムを迅速に提供できます。
STMicroelectronicsは、センサーレスFOCアルゴリズムを実装した、完全なESCリファレンスデザインを提供します。 STEVAL-ESC001V1 ESCリファレンスデザインは、エントリーレベルの商用ドローンデザインに適しており、6S LiPoバッテリーパックまたは同等のDC電源を搭載した3相ブラシレスモーター(またはPMSM)を最大30Aのピーク電流で駆動します。 STEVAL-ESC001V1を使用すると、完全な事前構成済みファームウェアパッケージ(STSW-ESC001V1)のおかげで、設計者はアプリケーションを迅速に開発でき、3シャント電流読み取り、速度制御、および完全アクティブブレーキを備えたセンサーレスフィールド指向制御アルゴリズムを実装できます。 STSW-ESC001V1ファームウェア/ソフトウェアパッケージとSTM32PMSM FOCソフトウェア開発キットMCライブラリを使用すると、STM32 MCUに組み込まれたFOCパラメータに基づいてESC設計を最適化し、STモータープロファイラーを利用して関連するモーターパラメータをすばやく取得できます。 STのセンサーレスFOCアルゴリズムは、任意の3相BLDCまたはPMSMモーターアプリケーションに適合させることができ、より長い飛行時間と最適な動的性能を提供します(図4および5)。
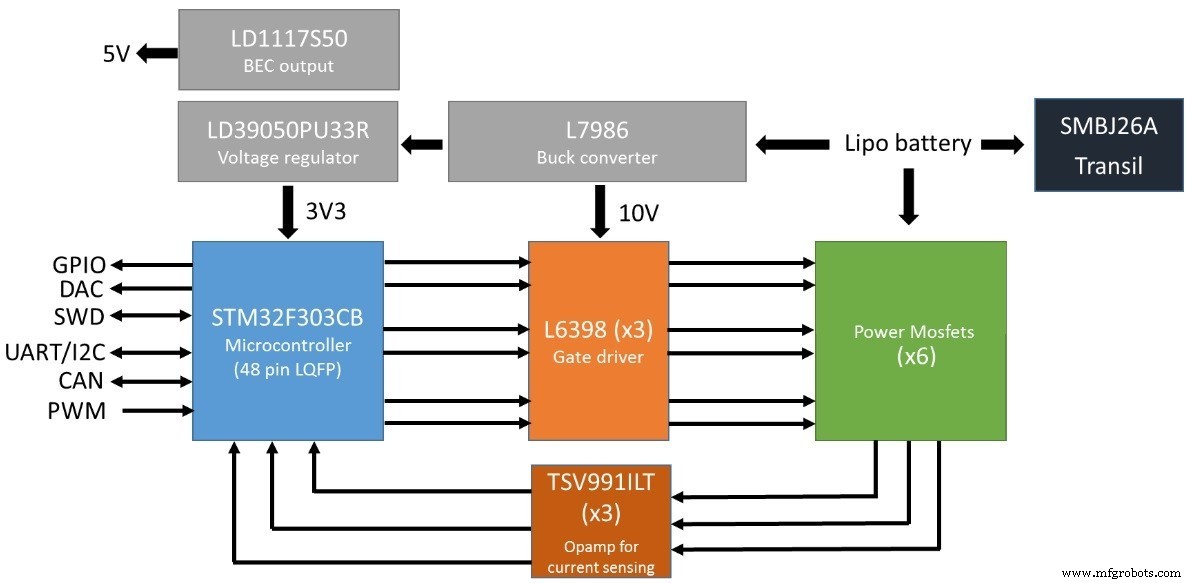
図4.STのSTEVAL-ESC001V1ソリューションのブロック図(出典:STMicroelectronics)
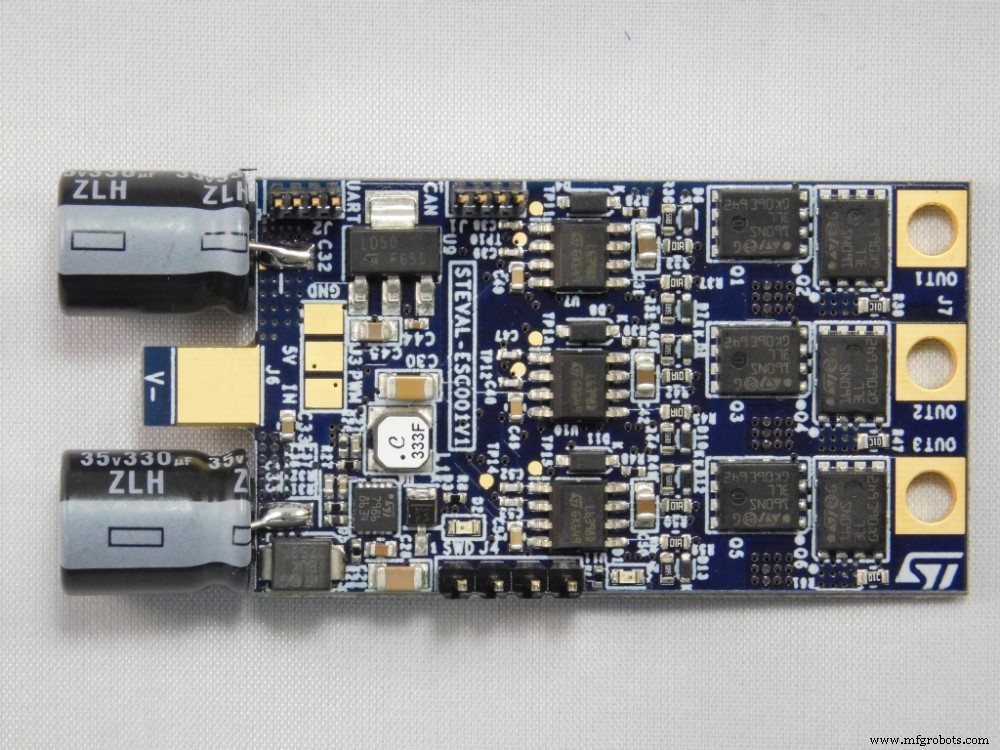
図5.STのSTEVAL-ESC001V1ボード(出典:STMicroelectronics)
HoverGamesドローン開発プラットフォームは、モジュール式で柔軟なNXPハードウェア/ソフトウェアソリューションであり、ドローンやローバーからUAVまで、あらゆる自動運転車の構築に使用できます。開発キットは基本的に、LinuxとOpen CVを備えたマイクロプロセッサと、飛行をガイドするためのさまざまな付属センサーに基づいています。
フライトコントローラーは、ドローンが安定していることを保証します。ボードはオープンソースであり、機能に応じて操作を最適化するために他の外部センサーを挿入する可能性があります。
LiPoバッテリーと国固有のテレメトリ無線は、IoT接続の1つを使用して実装する必要があります。キットの全機能を使用するには、2つの利用可能なテレメトリ無線機のどちらを購入するかを選択する必要があります。テレメトリを使用すると、飛行中に車両にライブ接続し、飛行中のドローンのステータスを確認し、自律ウェイポイントをロードして制御し、必要な変更を加えることができます。テレメトリデータはコントロールステーションに送信されますが、機内のフライトユニットにも保存されます。
キットのコンポーネントには、DC-DC電源モジュール、マウント付きGPS NEO-M8Nモジュール、安全スイッチ、ブザー、明るいRGBステータスLED、SEGGER J-Link EDU Mini / FTDIUSB-TTL-3V3ケーブル/ケーブル付きデバッグブレークアウトボードも含まれます、BLDCブラシレスモーター2212 920 kV、およびESCモーターコントローラー40 A OPTO(図6)。
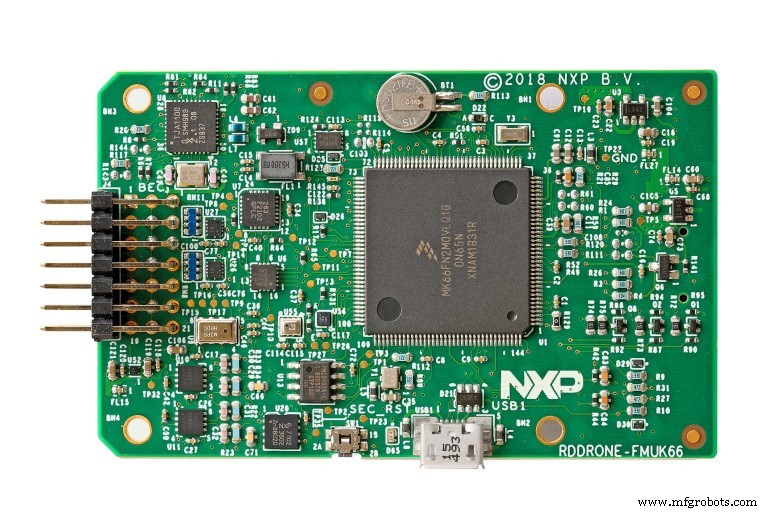
図6.RDDRONE-FMUK66フライトユニット(出典:NXP)
>>この記事はもともと姉妹サイトのPowerElectronicsNews。
>
関連コンテンツ:
- ドローン用の電子スピードコントローラーの設計
- ドローンはワイヤレス充電ソリューションで動き続けます
- LiDARセンサーはUAVでの高解像度イメージングをサポートします
- 開発キットは、デジタル電源、モーター制御設計用のプラットフォームを提供します
- ロボットシステムのモーター制御の設計
- センサーフュージョンには複数のメリットがあります
Embeddedの詳細については、Embeddedの週刊メールニュースレターを購読してください。
埋め込み