


DCモーターの速度制御–電圧、静水圧、磁束制御方法
DCモーターの速度制御方法–直列およびシャントDCモーターの電圧、静水圧、および磁束制御
DCモーターは、直流(DC)電力を、磁力によって生成される力に基づいて機械的電力に変換するために使用されます。モーターの出力は、シャフトの回転(速度)に関する機械的動力です。
アプリケーションに応じて、モーターの速度を変更する必要があります。したがって、意図的な速度の変更は、モーターの速度制御として知られています。
速度制御という用語は、速度調整とは異なります。速度調整とは、負荷の変化に対してシャフトの速度を一定に保つことを意味します。
- 関連記事:DCマシン–建設、作業、タイプ、アプリケーション
DCモーターのEMF方程式
DCモーターのEMF方程式を以下に示します:
Eb=PΦNZ/60A
場所;
- P=極の数
- Ф=極あたりの磁束
- N =モーターの速度(RPM)
- Z=導体の数
- A=並列パスの数
モーターが設計されると、極の数(P)、導体の数(Z)、および並列パスの数(A)は変更できません。したがって、これらは固定数量です。
Eb∝ΦN
Eb=kΦN
ここで、k=比例定数
DCモーターの場合、EMFは次のようにも定義されます;
E b =V – I a R a
場所;
- V=供給電圧
- I a =電機子電流
- R a =アーマチュア抵抗
次に、両方の方程式を比較します;
kΦN= V – I a R a
k =N =V – I a R a /kΦ
上記の式から、モーターの速度は供給電圧(V)、磁束(Φ)、および電機子抵抗(R a )に依存します。 。
したがって、DCモーターの速度は、変更することで変更、変更、および制御できます。
- 端子電圧「V」(別名印加電圧制御方法 。
- 電機子抵抗Raによる外部抵抗 (別名レオスタティック制御方法 。
- 極あたりの磁束Φ(別名磁束制御方法 。
ここでは、端子電圧と電機子抵抗は電機子回路に関連付けられており、極あたりの磁束は界磁回路に関連付けられています。
したがって、DCモーターの速度制御方法は次のように分類されます;
- 電機子制御方法
- フィールド制御方法
次に、DCシリーズ、シャント、および複合モーターにこれらのメソッドを実装する方法について説明します。
- 関連記事:サーボモーター–タイプ、構造、作業、制御、およびアプリケーション
DCシリーズモーターの速度制御
DCシリーズモーターの速度制御は、電機子制御とフィールド制御の方法で行われます。
DCシリーズモーターの電機子抵抗制御方法
この方法では、可変抵抗器またはレオスタットを電機子抵抗器と直列に接続します。この方法の回路図は下図のようになります。
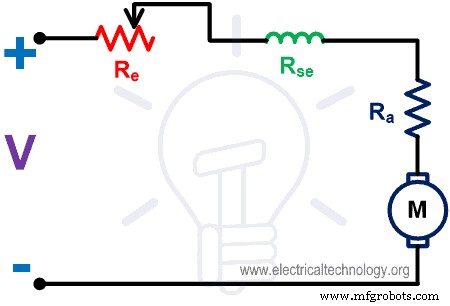
図-1
直列モーターでは、電機子巻線は界磁巻線と直列に接続されています。したがって、電機子電流と界磁電流は同じです。
電機子抵抗を変化させることにより、電機子電流と電機子電圧が変化します。外部抵抗の値が増加すると、電機子の両端の電圧と電機子巻線からの電流が減少します。そして、速度が低下します。
この方法では、モーターの速度は、外部抵抗が接続されていない場合の速度のレベルからのみ低下します。モーターの速度はこのレベルから上げることはできません。
ここでは、外部抵抗がアーマチュアと直列に接続されています。したがって、全負荷電流が外部抵抗を流れます。そのため、全負荷電流を継続的に流すように設計されています。
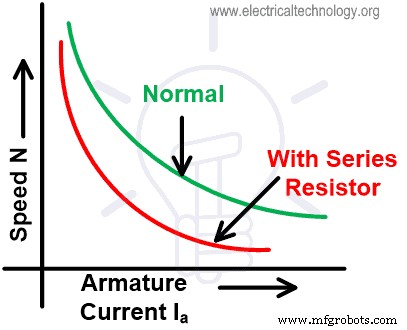
図-2
- 関連記事:ブラシレスDCモーター(BLDC)–構造、動作原理、およびアプリケーション
DCシリーズモーターの電機子電圧制御方法
この方法では、電機子電圧(供給電圧)を変化させることによって速度を制御します。この方法では、別の可変電圧源が必要です。
モーターの速度は供給電圧に比例します。したがって、電圧が上昇すると、モーターの速度が上昇し、その逆も同様です。
通常、このメソッドは使用されません。可変電源のコストが非常に高いためです。したがって、この方法が速度制御に使用されることはめったにありません。
DCシリーズモーターのフィールド制御方法
界磁電流は磁束に比例します。この方法では、界磁電流を制御することによって速度を制御します。界磁電流を制御する方法は2つあります;
- フィールドダイバータ制御
- タップされたファイルコントロール
ファイルされたダイバーターコントロール
この方法では、直列界磁巻線がダイバータと並列に接続されます。ダイバータは可変抵抗器に他なりません。界磁電流の一部はダイバータを通過します。
モーターの速度の方程式から、磁束はモーターの速度に反比例します。したがって、フラックスが減少すると、速度が増加します。
ダイバータ抵抗の値を小さくすると、界磁電流が少なくなり、モーター内で生成される磁束が少なくなります。したがって、モーターの速度が上がります。
この方法では、速度を通常の速度から上げることができます。この方法の回路図は下図のようになります。
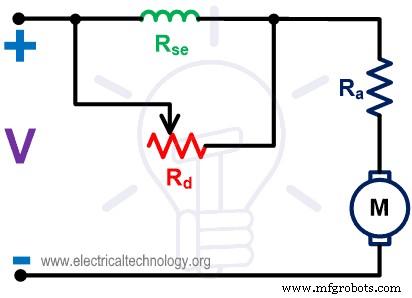
図-3
- 関連記事:ステッピングモーター–タイプ、構造、操作、用途
タップされたフィールドコントロール
界磁巻線をタップして、巻線の巻数を選択します。タッピングを選択することにより、界磁電流が制御されます。
ターン数が多いほど、流れ電流は大きくなり、速度は遅くなります。巻数が少ないほど、印加電流は少なくなり、多い場合は速度が速くなります。
したがって、この方法では、フィールド巻線に提供されている適切なタッピングを選択することで速度を制御できます。
このメソッドは、ドライブの速度制御のための電気牽引で使用されます。この方法の回路図は下図のようになります。
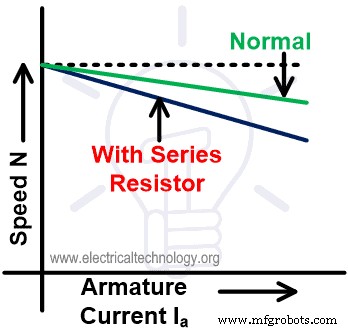
図-4
DCシャントモーターの速度制御
DCシャントモーターの速度制御の方法は、DCシリーズモーターに似ています。 DCシャントモーターにも適用可能な電機子制御およびフィールド制御方法。
- 関連記事:LTおよびHTモーターのケーブルサイズの計算
DCシャントモーターの電機子抵抗制御方法
この方法では、電機子回路に外部抵抗が追加されます。界磁巻線は電源に直接接続されています。したがって、界磁電流は同じままです。また、外部抵抗が変化しても磁束は同じままです。
速度の式から、電機子電流はモーターの速度に比例します。外部抵抗の値が増加すると、電機子電流は減少します。したがって、速度が低下します。
このメソッドは、速度を通常の値より低く制御するために使用されます。速度は通常の速度より速くすることはできません。この方法の接続図は下図のようになります。
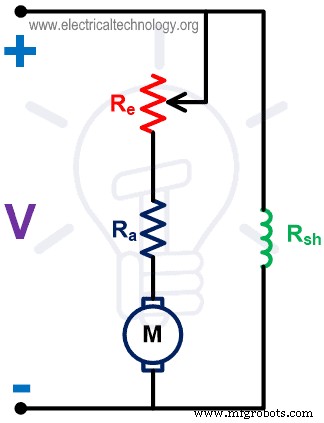
図-5
図-6
- 関連記事:単相誘導電動機–建設、作業、種類、用途
DCシャントモーターのフィールド制御方法
DCシャントモーターでは、可変抵抗器がシャント界磁巻線と直列に接続されています。界磁電流は、この可変抵抗器によって変化させることができます。この可変抵抗器は、フィールドレギュレータとも呼ばれます。
このメソッドの接続図は次の図のようになります。
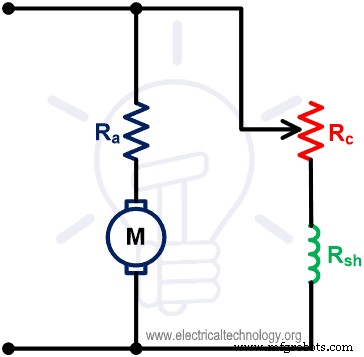
図-7
上記の回路図から、シャントフィールド電流の式は次のようになります;
抵抗の値を大きくすると、界磁電流が減少し、磁束が減少します。速度の方程式から、磁束は速度に反比例します。したがって、フラックスが減少すると速度が増加します。
したがって、このメソッドは、通常の速度より上の速度を制御するために適用できます。この方法では、速度を通常の速度より低くすることはできません。この方法の速度-電流特性は下図のようになります。
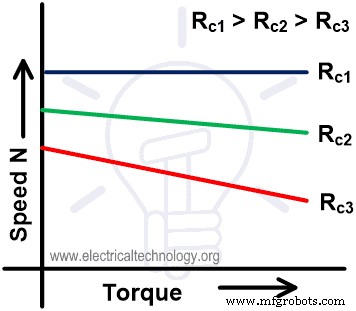
図-8
- 関連記事:三相誘導電動機–建設、作業、種類、用途
DCシャントモーターの電機子電圧制御方法
この方法では、界磁巻線は定電源によって供給されます。ただし、電機子巻線は別の可変DC電源から供給されます。
このメソッドは、Ward-Leonardメソッドとも呼ばれます。 。この方法の接続図は下図のようになります。 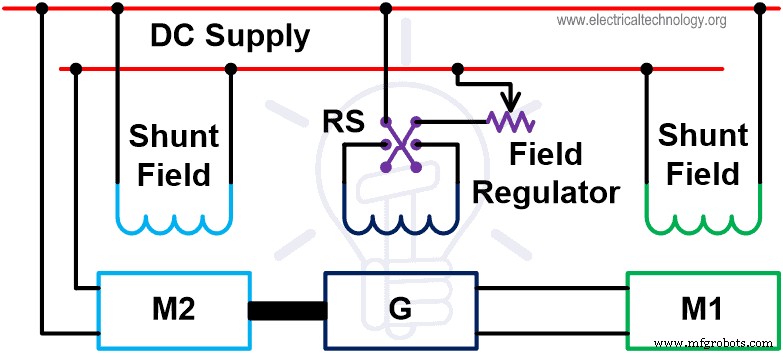
図-9
上の図から、モーターM1の速度を制御しています。このモーターは発電機Gから電力を供給されていました。
シャント界磁巻線はDC電源に接続されています。発電機GはモーターM2によって駆動される。モーターM2は定速モーターであり、DC電源から供給されます。
発電機Gの出力電圧がモーターに供給されると、モーターM1が回転を開始します。発電機Gの出力電圧を制御することでモーターの速度を制御できます。
フィールドレギュレーターは、フィールド励起を制御するためにDC供給ラインで発電機の両端に接続されています。
発電機の励起電圧を制御することにより、発電機の出力電圧が制御されます。そして、この電圧はモーターM1の速度を制御します。
スイッチRSはリバーススイッチです。このスイッチは、フィールド励起の端子を切り替えるために使用されます。このため、励起電流が逆になり、逆の電圧が発生します。
したがって、この反対の電圧はモーターM1の速度を逆転させます。したがって、この方法により、モーターは両方向に回転することができます。また、回転方向の両側で速度を制御できます。
- 関連記事:モーター効率とは何ですか、それを改善する方法は?
ワードレナード方式の場合の長所と短所
ワードレナードメソッドの利点
この方法の利点を以下に要約します;
- モーターの速度は広範囲にわたって制御できます。
- モーターの動作は非常にスムーズです。
- モーターの速度調整は良好です。
- モーターは均一な加速度で動作できます。
- 固有の遮断容量があります。
- 回転方向の反転が簡単で、速度は両方向に制御できます。
ワードレナードメソッドのデメリット
この方法の欠点を以下に要約します;
- メインモーターと同じ定格の2台の追加の機械(モータージェネレーターセット)が必要です。したがって、この取り決めの全体的なコストは非常に高くなります。
- より多くのノイズが発生します。
- 頻繁なメンテナンスが必要です。
- この配置では、インストールするためにより多くのスペースが必要です。
- モーターが軽負荷状態で長時間動作する場合、全体的な効率は低くなります。
ワードレナードメソッドの適用
この方法は、モーターを広い速度範囲で制御する場合に使用されます。モーターのアプリケーションは速度に非常に敏感です。この状態では、この方法は非常に便利です。
このメソッドは、次のようなアプリケーションで使用されます。クレーン、掘削機、エレベーター、鉱山用ホイスト、抄紙機、鉄鋼圧延機など。
産業技術